Collision Probability Estimation for Optimization-based Vehicular Motion Planning
作者: Leon Tolksdorf, Arturo Tejada, Christian Birkner, Nathan van de Wouw
分类: cs.RO, math.OC
发布日期: 2025-05-27 (更新: 2026-01-21)
备注: 14 pages, 7 figures
💡 一句话要点
提出基于多圆近似的碰撞概率估计方法,用于优化型车辆运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 碰撞概率估计 运动规划 自动驾驶 多圆近似 随机模型预测控制
📋 核心要点
- 现有基于采样的碰撞概率估计方法计算效率低,且结果不确定,难以满足优化型运动规划的需求。
- 论文提出一种基于多圆近似的碰撞概率估计方法,将车辆位置和航向角建模为随机变量,并保证过近似。
- 实验表明,该方法在随机模型预测控制中能够生成可复现轨迹,并能有效处理不同程度的不确定性。
📝 摘要(中文)
针对自动驾驶中运动规划算法对碰撞概率(POC)估计的需求,提出了一种新的方法。该方法通过多圆形状近似来过近似车辆形状,从而估计两车之间的碰撞概率。与现有文献不同,该方法将预测车辆的位置和航向角建模为随机变量,并保证提供的POC是过近似,这对于提供安全保证至关重要。对于位置和航向角的高斯不确定性情况,提出了一种计算高效的POC估计算法。该算法被应用于路径跟踪随机模型预测控制器(SMPC)中进行运动规划。实验结果表明,该算法能够生成可复现的轨迹,同时控制器在测试用例中保持可行性,并展示了处理不同程度不确定性的能力。
🔬 方法详解
问题定义:论文旨在解决自动驾驶车辆运动规划中,高效且确定性地估计碰撞概率(POC)的问题。现有基于采样的POC估计方法计算量大,结果具有随机性,不适用于优化型运动规划算法。此外,现有方法通常忽略航向角的不确定性,导致估计不准确。
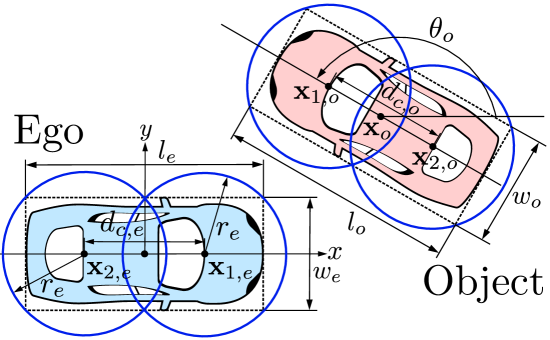
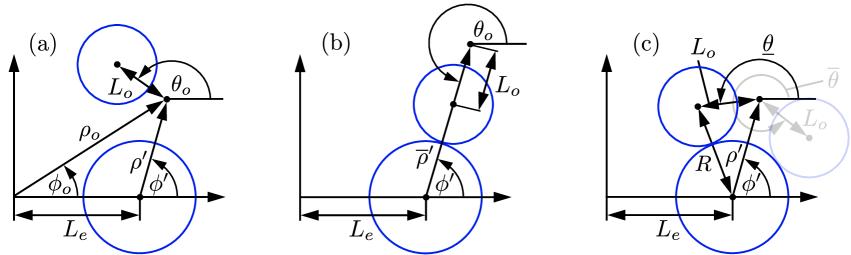
核心思路:论文的核心思路是通过多圆形状近似来过近似车辆的形状,从而简化碰撞概率的计算。将预测车辆的位置和航向角建模为随机变量,并利用概率论方法计算碰撞概率。通过保证POC的过近似,确保运动规划的安全性。
技术框架:该方法主要包含以下几个步骤:1)使用多个圆形来近似车辆的形状;2)将预测车辆的位置和航向角建模为高斯随机变量;3)推导基于多圆近似的碰撞概率计算公式;4)设计高效的算法来计算碰撞概率;5)将该算法集成到随机模型预测控制器(SMPC)中进行运动规划。
关键创新:该方法的主要创新点在于:1)提出了一种基于多圆近似的车辆形状表示方法,简化了碰撞概率的计算;2)将车辆的航向角建模为随机变量,提高了碰撞概率估计的准确性;3)保证碰撞概率的过近似,为运动规划提供了安全保证;4)提出了一种计算高效的碰撞概率估计算法,适用于实时运动规划。
关键设计:论文的关键设计包括:1)圆形数量的选择,需要在计算复杂度和近似精度之间进行权衡;2)高斯分布参数(均值和方差)的确定,需要根据实际的预测误差进行估计;3)碰撞概率计算公式的推导,需要考虑圆形之间的重叠情况;4)SMPC控制器的设计,需要将碰撞概率作为约束条件,以避免碰撞。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够在保证安全性的前提下,生成可复现的轨迹。与传统的基于采样的碰撞概率估计方法相比,该方法具有更高的计算效率和确定性。在测试用例中,该方法能够有效地处理不同程度的不确定性,并保持控制器的可行性。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的运动规划、避障和决策控制等领域。通过准确、高效地估计碰撞概率,可以提高自动驾驶系统的安全性、可靠性和适应性。该方法还可扩展到其他机器人领域,例如无人机、无人船等,具有广泛的应用前景。
📄 摘要(原文)
Many motion planning algorithms for automated driving require estimating the probability of collision (POC) to account for uncertainties in the measurement and estimation of the motion of road users. Common POC estimation techniques often utilize sampling-based methods that suffer from computational inefficiency and a non-deterministic estimation, i.e., each estimation result for the same inputs is slightly different. In contrast, optimization-based motion planning algorithms require computationally efficient POC estimation, ideally using deterministic estimation, such that typical optimization algorithms for motion planning retain feasibility. Estimating the POC analytically, however, is challenging because it depends on understanding the collision conditions (e.g., vehicle's shape) and characterizing the uncertainty in motion prediction. In this paper, we propose an approach in which we estimate the POC between two vehicles by over-approximating their shapes by a multi-circular shape approximation. The position and heading of the predicted vehicle are modelled as random variables, contrasting with the literature, where the heading angle is often neglected. We guarantee that the provided POC is an over-approximation, which is essential in providing safety guarantees. For the particular case of Gaussian uncertainty in the position and heading, we present a computationally efficient algorithm for computing the POC estimate. This algorithm is then used in a path-following stochastic model predictive controller (SMPC) for motion planning. With the proposed algorithm, the SMPC generates reproducible trajectories while the controller retains its feasibility in the presented test cases and demonstrates the ability to handle varying levels of uncertainty.