SPADE: Towards Scalable Path Planning Architecture on Actionable Multi-Domain 3D Scene Graphs
作者: Vignesh Kottayam Viswanathan, Akash Patel, Mario Alberto Valdes Saucedo, Sumeet Satpute, Christoforos Kanellakis, George Nikolakopoulos
分类: cs.RO
发布日期: 2025-05-25 (更新: 2025-07-30)
备注: Accepted to IROS 2025
💡 一句话要点
SPADE:面向可操作多域3D场景图的可扩展路径规划架构
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 路径规划 场景图 自主导航 动态环境 分层规划
📋 核心要点
- 现有场景图路径规划方法在遇到障碍时需要对整个场景图进行低效的重新规划,难以应对动态环境。
- SPADE框架结合分层路径规划与局部几何感知,通过局部层规划与局部几何场景导航相结合,提高规划效率。
- 通过仿真实验和四足机器人部署验证,SPADE在复杂和动态场景中表现出良好的导航性能。
📝 摘要(中文)
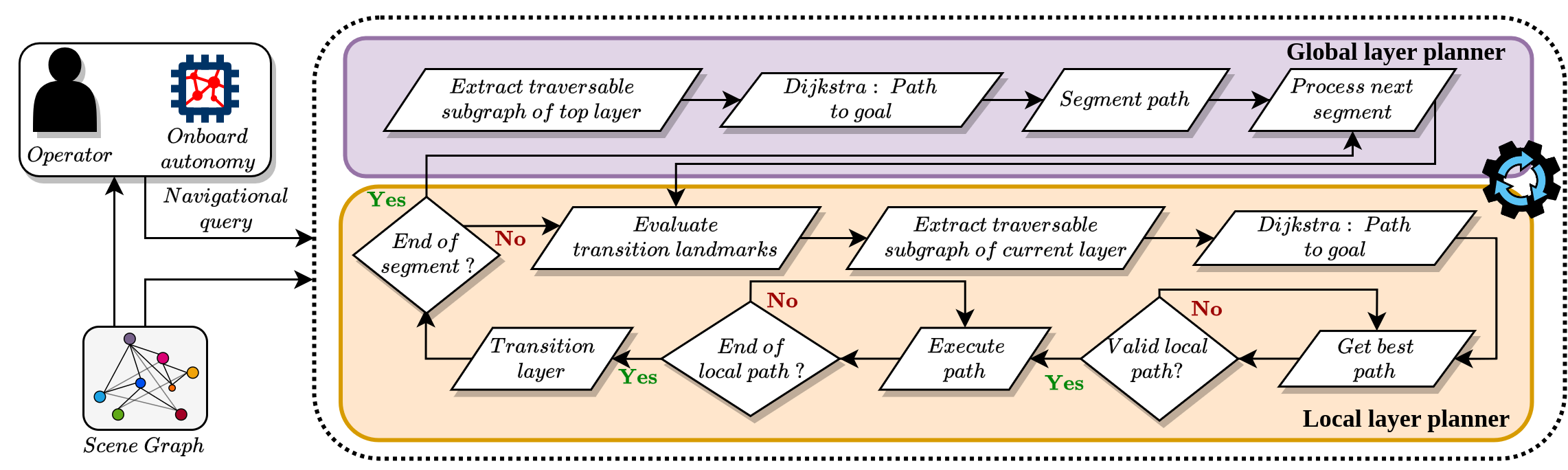
本文介绍SPADE,一个专为在动态环境中使用3D场景图进行自主导航而设计的路径规划框架。SPADE结合了分层路径规划与局部几何感知,从而实现在动态场景中的无碰撞移动。该框架将规划问题分为两个部分:(a)解决稀疏抽象的全局层规划;(b)根据局部几何场景导航,在更密集的较低局部层中进行迭代路径细化。为了确保在密集的、多任务域场景图中高效提取可行路线,该框架在路径规划之前强制执行对可通行边缘的知情采样。这消除了与路径规划无关的冗余信息,并降低了图上的整体规划复杂度。现有方法通过解耦分层和几何路径评估过程来解决场景图上的路径规划问题。具体而言,当遇到阻碍原始路线的路径障碍时,这会导致对整个场景图进行低效的重新规划。相比之下,SPADE优先考虑局部层规划与局部几何场景导航相结合,从而能够在动态场景中导航,同时保持计算可通行路线的效率。我们通过广泛的仿真实验和四足机器人的真实部署验证了SPADE,证明了其在处理复杂和动态场景中的有效性。
🔬 方法详解
问题定义:现有场景图路径规划方法在动态环境中面临挑战,当遇到障碍物阻挡原始路径时,需要对整个场景图进行重新规划,效率低下。这种全局重新规划忽略了局部环境的动态变化,导致计算资源的浪费和响应时间的延迟。因此,需要一种能够快速适应局部环境变化,并高效找到可行路径的规划方法。
核心思路:SPADE的核心思路是将路径规划问题分解为全局抽象规划和局部几何细化两个层次。全局规划负责在稀疏的场景图上找到大致的路线,而局部规划则负责在更密集的局部层中进行路径的迭代优化,并结合局部几何信息进行避障。这种分层结构允许SPADE快速响应局部环境的变化,避免全局重新规划。
技术框架:SPADE框架包含以下主要模块:1) 场景图构建:构建包含环境语义和几何信息的3D场景图。2) 全局路径规划:在稀疏的全局场景图上,使用A等算法规划出一条粗略的路径。3) 局部路径规划:在全局路径附近的局部区域构建更密集的局部场景图,并在此图上进行路径优化,考虑局部几何信息和动态障碍物。4) 路径细化与执行*:迭代地进行局部路径规划,并根据规划结果控制机器人运动。
关键创新:SPADE的关键创新在于将分层路径规划与局部几何感知相结合。与现有方法不同,SPADE优先考虑局部层规划,并结合局部几何信息进行导航,从而能够快速适应动态环境的变化,避免全局重新规划。此外,SPADE还采用了知情采样策略,在路径规划之前对可通行边缘进行采样,减少了不相关信息的干扰,降低了规划复杂度。
关键设计:SPADE的关键设计包括:1) 知情采样策略:根据机器人当前状态和目标位置,对场景图中的边缘进行采样,只保留与路径规划相关的边缘。2) 局部场景图构建:根据全局路径,在机器人周围构建局部场景图,该图包含更密集的几何信息和动态障碍物信息。3) 局部路径优化:使用优化算法(如梯度下降)在局部场景图上进行路径优化,考虑避障和路径平滑性等因素。 4) 分层规划的迭代更新机制:根据局部规划的结果,动态调整全局路径,实现全局和局部规划的协同。
🖼️ 关键图片


📊 实验亮点
SPADE通过仿真实验和四足机器人真实部署验证了其有效性。在仿真实验中,SPADE在动态环境中能够快速找到可行路径,并成功避开障碍物。在四足机器人部署中,SPADE能够控制机器人在复杂地形上稳定行走,并完成导航任务。实验结果表明,SPADE在动态环境中的导航性能优于现有方法,能够显著提高机器人的自主导航能力。
🎯 应用场景
SPADE适用于各种需要在动态环境中进行自主导航的应用,例如:仓库机器人、自动驾驶汽车、无人机配送、搜救机器人等。该框架能够提高机器人在复杂环境中的导航效率和安全性,降低人工干预的需求,具有广阔的应用前景。
📄 摘要(原文)
In this work, we introduce SPADE, a path planning framework designed for autonomous navigation in dynamic environments using 3D scene graphs. SPADE combines hierarchical path planning with local geometric awareness to enable collision-free movement in dynamic scenes. The framework bifurcates the planning problem into two: (a) solving the sparse abstract global layer plan and (b) iterative path refinement across denser lower local layers in step with local geometric scene navigation. To ensure efficient extraction of a feasible route in a dense multi-task domain scene graphs, the framework enforces informed sampling of traversable edges prior to path-planning. This removes extraneous information not relevant to path-planning and reduces the overall planning complexity over a graph. Existing approaches address the problem of path planning over scene graphs by decoupling hierarchical and geometric path evaluation processes. Specifically, this results in an inefficient replanning over the entire scene graph when encountering path obstructions blocking the original route. In contrast, SPADE prioritizes local layer planning coupled with local geometric scene navigation, enabling navigation through dynamic scenes while maintaining efficiency in computing a traversable route. We validate SPADE through extensive simulation experiments and real-world deployment on a quadrupedal robot, demonstrating its efficacy in handling complex and dynamic scenarios.