MaskedManipulator: Versatile Whole-Body Manipulation
作者: Chen Tessler, Yifeng Jiang, Erwin Coumans, Zhengyi Luo, Gal Chechik, Xue Bin Peng
分类: cs.RO, cs.AI, cs.GR
发布日期: 2025-05-25 (更新: 2025-12-11)
备注: SIGGRAPH Asia 2025 (Project page: https://research.nvidia.com/labs/par/maskedmanipulator/ )
💡 一句话要点
MaskedManipulator:用于全身操作的多功能物理模拟人形运动生成
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 全身操作 人形运动生成 物理模拟 模仿学习 知识蒸馏 人机交互 目标导向控制
📋 核心要点
- 现有方法在全身物体操作中,难以兼顾运动的真实感和用户对高级目标的灵活控制。
- MaskedManipulator通过两阶段学习,先训练跟踪控制器,再蒸馏出生成控制策略,实现复杂交互行为。
- 该方法能够生成目标导向的操作行为,扩展了交互式动画系统的应用范围,超越了特定任务的局限。
📝 摘要(中文)
本文旨在解决为全身物体操作合成多功能、物理模拟的人形运动的挑战。与侧重于详细运动跟踪、轨迹跟随或远程操作的现有方法不同,本文提出的框架允许用户指定多功能的高级目标,例如目标物体姿势或身体姿势。为此,我们引入了MaskedManipulator,这是一种从大规模人体运动捕捉数据上训练的跟踪控制器中提炼出的生成控制策略。这种两阶段学习过程使系统能够执行复杂的交互行为,同时为用户提供对角色和物体运动的直观控制。MaskedManipulator产生目标导向的操作行为,将交互式动画系统的范围扩展到特定于任务的解决方案之外。
🔬 方法详解
问题定义:现有方法在生成全身物体操作的物理模拟人形运动时,往往侧重于精确的运动跟踪或轨迹跟随,缺乏对用户高级目标(如物体或身体姿势)的灵活控制能力。这限制了交互式动画系统的应用范围,使其难以处理复杂和多样的操作任务。
核心思路:本文的核心思路是通过两阶段学习,将精确的运动跟踪能力与灵活的目标控制能力相结合。首先训练一个跟踪控制器,使其能够模仿真实的人体运动捕捉数据。然后,将该控制器的知识蒸馏到一个生成控制策略中,该策略能够根据用户指定的高级目标生成相应的操作行为。
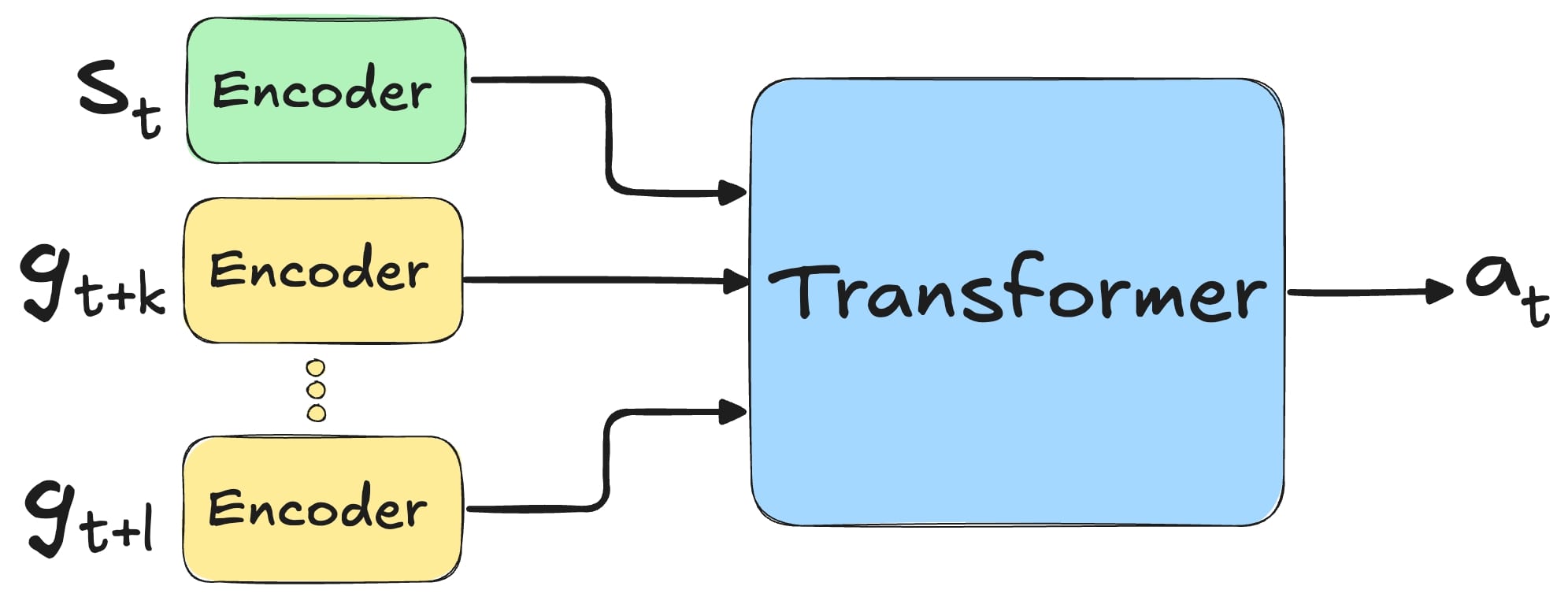
技术框架:MaskedManipulator的技术框架主要包含两个阶段:1) 跟踪控制器训练阶段:利用大规模人体运动捕捉数据训练一个跟踪控制器,使其能够精确地模仿人类的运动。2) 生成控制策略蒸馏阶段:将训练好的跟踪控制器的知识蒸馏到一个生成控制策略中。该策略以用户指定的高级目标(如目标物体姿势或身体姿势)作为输入,并生成相应的操作行为。MaskedManipulator使用了一种掩码机制,允许用户选择性地控制角色身体的不同部分,从而实现更灵活的交互。
关键创新:MaskedManipulator的关键创新在于其两阶段学习框架,该框架能够将精确的运动跟踪能力与灵活的目标控制能力相结合。通过先训练跟踪控制器,再蒸馏出生成控制策略,MaskedManipulator能够生成更加自然和逼真的操作行为,同时允许用户对角色和物体运动进行直观的控制。与现有方法相比,MaskedManipulator能够处理更复杂和多样的操作任务。
关键设计:MaskedManipulator的具体实现细节未知,摘要中没有详细描述网络结构、损失函数或参数设置。但可以推测,跟踪控制器可能采用模仿学习或强化学习的方法进行训练,而蒸馏过程可能涉及行为克隆或对抗学习等技术。掩码机制的具体实现方式也未知,但可能涉及对角色身体不同部分的运动进行加权或选择性地激活。
🖼️ 关键图片


📊 实验亮点
论文提出了一种新颖的全身操作框架MaskedManipulator,通过两阶段学习实现了对复杂交互行为的控制。该框架能够根据用户指定的高级目标生成目标导向的操作行为,扩展了交互式动画系统的应用范围。虽然摘要中没有提供具体的性能数据,但可以推断,MaskedManipulator在运动的真实感和用户控制的灵活性方面都优于现有方法。
🎯 应用场景
MaskedManipulator具有广泛的应用前景,例如在游戏开发中,可以用于生成逼真的人形角色动画,并允许玩家对角色进行灵活的控制。在虚拟现实和增强现实中,可以用于创建更加沉浸式的交互体验。此外,MaskedManipulator还可以应用于机器人控制领域,用于生成人形机器人的操作行为。
📄 摘要(原文)
We tackle the challenges of synthesizing versatile, physically simulated human motions for full-body object manipulation. Unlike prior methods that are focused on detailed motion tracking, trajectory following, or teleoperation, our framework enables users to specify versatile high-level objectives such as target object poses or body poses. To achieve this, we introduce MaskedManipulator, a generative control policy distilled from a tracking controller trained on large-scale human motion capture data. This two-stage learning process allows the system to perform complex interaction behaviors, while providing intuitive user control over both character and object motions. MaskedManipulator produces goal-directed manipulation behaviors that expand the scope of interactive animation systems beyond task-specific solutions.