Object Classification Utilizing Neuromorphic Proprioceptive Signals in Active Exploration: Validated on a Soft Anthropomorphic Hand
作者: Fengyi Wang, Xiangyu Fu, Nitish Thakor, Gordon Cheng
分类: cs.RO, cs.NE
发布日期: 2025-05-23
DOI: 10.1109/BioRob60516.2024.10719855
💡 一句话要点
提出基于神经形态本体感受信号和软手的主动探索物体分类方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 本体感受 神经形态计算 脉冲神经网络 软体机器人手 触觉感知
📋 核心要点
- 现有假肢系统缺乏有效的本体感受反馈,限制了其灵活性和自然控制能力,是亟待解决的核心问题。
- 论文提出了一种结合软体机器人手、柔性本体感受传感器和脉冲神经网络的系统,用于物体分类。
- 实验结果表明,该系统在物体探索的早期阶段,分类精度优于现有学习方法,具有实际应用潜力。
📝 摘要(中文)
本体感受是触觉感知的关键感觉模式,通过提供身体部位的位置和运动反馈,在感知物体的3D结构中起着至关重要的作用。本体感受的恢复对于假肢手实现手中操作和自然控制至关重要。尽管其重要性,本体感受在人工系统中相对未被探索。本文介绍了一个新颖的平台,该平台集成了软体拟人机器人手(QB SoftHand)、柔性本体感受传感器和一个分类器,该分类器利用具有不同类型脉冲神经元的混合脉冲神经网络来解释由生物肌肉纺锤模型编码的神经形态本体感受信号。该编码方案和分类器在我们收集的YCB基准测试中主动探索十个对象的数据集上进行了实施和测试。我们的结果表明,该分类器比现有的学习方法实现了更准确的推断,尤其是在探索的早期阶段。该系统在触觉反馈和神经假肢领域具有发展潜力。
🔬 方法详解
问题定义:论文旨在解决人工系统中本体感受缺失的问题,特别是在假肢手中。现有的假肢手缺乏有效的本体感受反馈,导致操作不灵活、控制不自然。传统的物体识别方法通常依赖视觉信息,而忽略了触觉和本体感受的重要性。
核心思路:论文的核心思路是利用软体机器人手上的柔性本体感受传感器,模拟生物肌肉纺锤的工作方式,将手部的运动和姿态信息编码成神经形态信号。然后,使用脉冲神经网络(SNN)对这些信号进行处理和分类,从而实现对物体的识别。这种方法模拟了生物触觉感知的过程,有望提高假肢手的灵活性和自然控制能力。
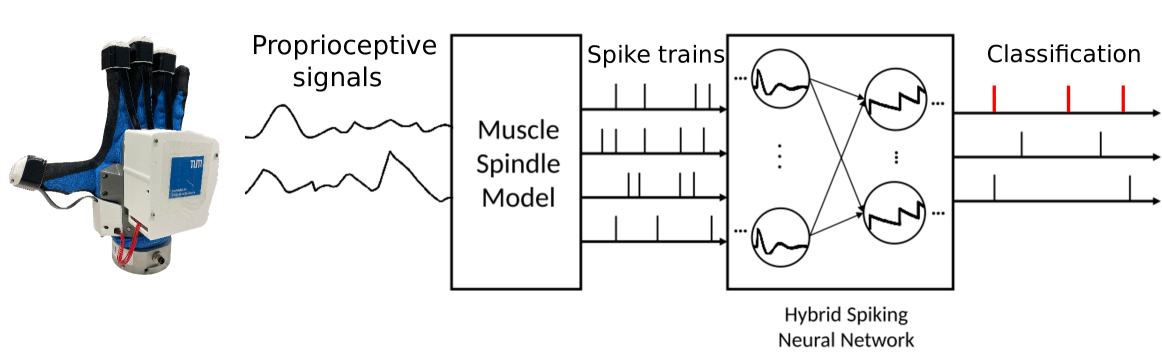
技术框架:该系统主要包含三个模块:1) 软体机器人手(QB SoftHand),用于与物体进行交互;2) 柔性本体感受传感器,用于感知手部的运动和姿态,并将其编码成神经形态信号;3) 脉冲神经网络(SNN)分类器,用于对神经形态信号进行处理和分类,从而识别物体。整个流程包括:机器人手主动探索物体 -> 本体感受传感器采集数据 -> 肌肉纺锤模型编码 -> 脉冲神经网络分类 -> 输出物体类别。
关键创新:该论文的关键创新在于将柔性本体感受传感器与脉冲神经网络相结合,用于物体识别。传统的物体识别方法通常依赖视觉信息,而忽略了触觉和本体感受的重要性。此外,使用脉冲神经网络可以更有效地处理神经形态信号,并模拟生物神经系统的信息处理方式。
关键设计:论文使用了QB SoftHand作为实验平台,并设计了柔性本体感受传感器来感知手部的运动和姿态。肌肉纺锤模型用于将本体感受信息编码成神经形态信号。脉冲神经网络分类器采用了混合结构,包含不同类型的脉冲神经元。具体参数设置和网络结构在论文中进行了详细描述(具体数值未知)。损失函数的设计和优化策略也对分类器的性能至关重要(具体细节未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该系统在YCB基准测试的十个物体上实现了较高的分类精度,尤其是在探索的早期阶段,优于现有的学习方法(具体提升幅度未知)。这表明该系统能够有效地利用本体感受信息进行物体识别,具有实际应用潜力。具体的性能数据和对比基线需要在论文中查找。
🎯 应用场景
该研究成果可应用于触觉反馈和神经假肢领域。通过恢复假肢手的本体感受,可以提高其灵活性和自然控制能力,使患者能够更好地完成日常任务。此外,该技术还可以应用于机器人灵巧操作、虚拟现实和人机交互等领域,为这些领域的发展提供新的思路和方法。
📄 摘要(原文)
Proprioception, a key sensory modality in haptic perception, plays a vital role in perceiving the 3D structure of objects by providing feedback on the position and movement of body parts. The restoration of proprioceptive sensation is crucial for enabling in-hand manipulation and natural control in the prosthetic hand. Despite its importance, proprioceptive sensation is relatively unexplored in an artificial system. In this work, we introduce a novel platform that integrates a soft anthropomorphic robot hand (QB SoftHand) with flexible proprioceptive sensors and a classifier that utilizes a hybrid spiking neural network with different types of spiking neurons to interpret neuromorphic proprioceptive signals encoded by a biological muscle spindle model. The encoding scheme and the classifier are implemented and tested on the datasets we collected in the active exploration of ten objects from the YCB benchmark. Our results indicate that the classifier achieves more accurate inferences than existing learning approaches, especially in the early stage of the exploration. This system holds the potential for development in the areas of haptic feedback and neural prosthetics.