D-LIO: 6DoF Direct LiDAR-Inertial Odometry based on Simultaneous Truncated Distance Field Mapping
作者: Lucia Coto-Elena, J. E. Maese, L. Merino, F. Caballero
分类: cs.RO
发布日期: 2025-05-22 (更新: 2025-11-27)
备注: 9 pages, 3 figures and 43 references
期刊: IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 169-176, 2026
💡 一句话要点
提出基于快速截断距离场映射的直接激光雷达惯性里程计D-LIO,实现6DoF位姿估计。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 激光雷达惯性里程计 直接法 截断距离场 点云配准 非线性优化
📋 核心要点
- 现有激光雷达惯性里程计依赖特征提取和跟踪,流程复杂且泛化性受限,难以直接处理原始点云数据。
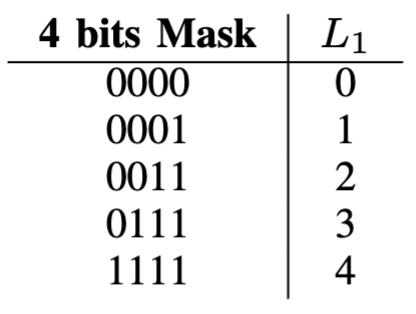
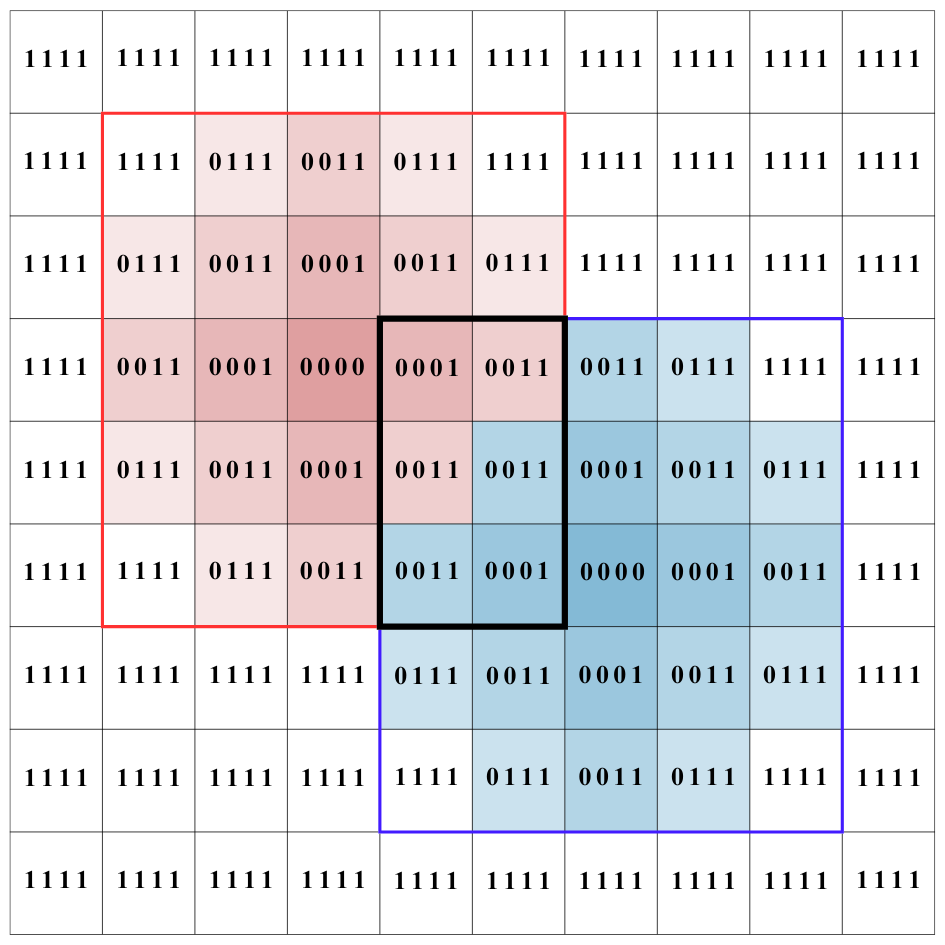
- D-LIO利用快速截断距离场(Fast-TDF)表示环境,将点云配准转化为非线性优化,无需特征选择与跟踪。
- 实验表明,D-LIO在精度上达到或超过现有方法,并能在线生成用于规划和避障的TDF地图。
📝 摘要(中文)
本文提出了一种新的6DoF直接激光雷达惯性里程计(D-LIO)方法,该方法基于CPU上的同时截断距离场映射。这种连续表示(在点附近)能够在线处理原始3D激光雷达数据,避免了激光雷达特征选择和跟踪的需要,简化了里程计流程,并且易于推广到许多场景。该方法基于提出的快速截断距离场(Fast-TDF)方法,作为一种表示环境的便捷工具。这种表示能够:i)将激光雷达点云配准作为一个非线性优化过程来解决,而无需在输入数据中选择/跟踪激光雷达特征;ii)同时生成环境的精确截断距离场地图;iii)以恒定时间更新该地图,而与其大小无关。该方法使用开放数据集(包括空中和地面数据集)进行了测试,并与其他最先进的里程计方法进行了基准测试,证明了相同或更好的精度水平,并增加了在线生成的TDF环境表示的价值,该表示可用于其他机器人任务,如规划或避障。源代码已公开发布。
🔬 方法详解
问题定义:传统的激光雷达惯性里程计(LIO)方法通常依赖于从激光雷达点云中提取特征(例如,角点、平面),然后跟踪这些特征以估计传感器的运动。这种方法的痛点在于特征提取过程复杂,对环境的适应性有限,且容易受到噪声和遮挡的影响。此外,特征提取和跟踪的计算成本较高,限制了系统的实时性。
核心思路:D-LIO的核心思路是直接利用原始激光雷达点云数据进行里程计估计,避免了特征提取和跟踪的步骤。它通过构建环境的截断距离场(Truncated Distance Field, TDF)表示,将点云配准问题转化为一个非线性优化问题,直接优化传感器位姿,使得点云与TDF地图之间的距离最小化。这样可以充分利用原始点云的信息,提高里程计的精度和鲁棒性。
技术框架:D-LIO的整体框架包括以下几个主要模块:1) 预处理:对原始激光雷达点云进行滤波和降采样等预处理操作。2) 惯性测量单元(IMU)预积分:利用IMU数据进行预积分,提供位姿的先验估计。3) 快速截断距离场(Fast-TDF)构建与更新:基于激光雷达点云构建和维护环境的TDF地图。4) 位姿优化:利用非线性优化方法,最小化激光雷达点云与TDF地图之间的距离,估计传感器的位姿。5) 地图更新:根据估计的位姿,更新TDF地图。
关键创新:D-LIO最重要的技术创新点在于提出了Fast-TDF方法,用于高效地构建和更新环境的截断距离场地图。与传统的TDF构建方法相比,Fast-TDF能够在CPU上实现快速的地图更新,并且地图更新的时间复杂度与地图的大小无关。此外,D-LIO直接利用原始点云进行位姿估计,避免了特征提取和跟踪的步骤,简化了里程计流程。
关键设计:D-LIO的关键设计包括:1) Fast-TDF的实现细节,例如,使用体素哈希表来存储TDF数据,并采用并行计算来加速地图更新。2) 位姿优化的损失函数,通常采用Huber损失或Cauchy损失等鲁棒损失函数,以减少噪声和外点的影响。3) IMU和激光雷达数据的融合策略,例如,使用扩展卡尔曼滤波器(EKF)或非线性优化方法来融合IMU和激光雷达数据。
🖼️ 关键图片

📊 实验亮点
D-LIO在多个公开数据集上进行了测试,包括空中和地面数据集。实验结果表明,D-LIO在精度上达到了与现有最先进方法相当甚至更好的水平。更重要的是,D-LIO能够在线生成环境的TDF地图,这为其他机器人任务提供了额外的价值。例如,在KITTI数据集上的实验表明,D-LIO的里程计精度与LIO-SAM相当,但D-LIO能够同时生成可用于规划和避障的TDF地图。
🎯 应用场景
D-LIO具有广泛的应用前景,包括:无人驾驶、机器人导航、三维重建、虚拟现实等。其在线生成TDF地图的能力,使其特别适用于需要实时环境感知和交互的机器人应用,例如,在未知环境中进行自主导航、避障和路径规划。此外,D-LIO还可以用于构建高精度的三维地图,为城市规划、建筑设计等领域提供支持。
📄 摘要(原文)
This paper presents a new approach for 6DoF Direct LiDAR-Inertial Odometry (D-LIO) based on the simultaneous mapping of truncated distance fields on CPU. Such continuous representation (in the vicinity of the points) enables working with raw 3D LiDAR data online, avoiding the need of LiDAR feature selection and tracking, simplifying the odometry pipeline and easily generalizing to many scenarios. The method is based on the proposed Fast Truncated Distance Field (Fast-TDF) method as a convenient tool to represent the environment. Such representation enables i) solving the LiDAR point-cloud registration as a nonlinear optimization process without the need of selecting/tracking LiDAR features in the input data, ii) simultaneously producing an accurate truncated distance field map of the environment, and iii) updating such map at constant time independently of its size. The approach is tested using open datasets, aerial and ground. It is also benchmarked against other state-of-the-art odometry approaches, demonstrating the same or better level of accuracy with the added value of an online-generated TDF representation of the environment, that can be used for other robotics tasks as planning or collision avoidance. The source code is publicly available at https://anonymous.4open.science/r/D-LIO