TacCompress: A Benchmark for Multi-Point Tactile Data Compression in Dexterous Hand
作者: Yan Zhao, Yang Li, Zhengxue Cheng, Hengdi Zhang, Li Song
分类: cs.RO
发布日期: 2025-05-22 (更新: 2025-08-28)
备注: 9 pages, 10 figures, 2 tables
💡 一句话要点
TacCompress:针对灵巧手多点触觉数据压缩的基准研究
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉数据压缩 灵巧手 机器人操作 图像编码 多点触觉数据集
📋 核心要点
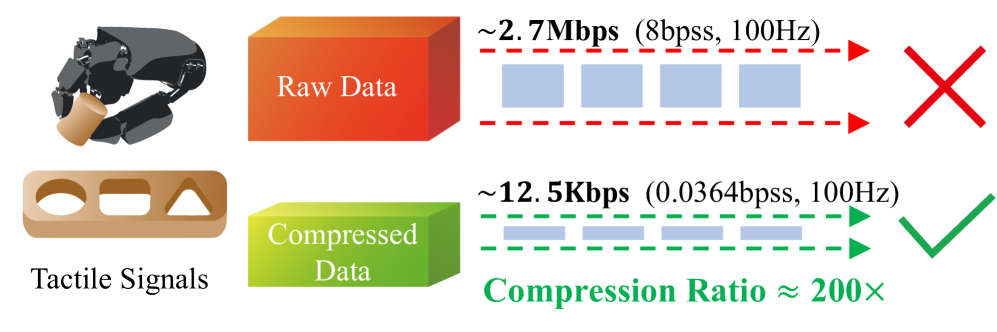
- 灵巧手触觉感知面临数据量大、传输带宽受限的挑战,亟需高效的触觉数据压缩方法。
- 论文核心在于将触觉数据转化为图像,并利用图像压缩算法实现高效的触觉数据压缩。
- 实验表明,无损压缩可达200倍压缩比,有损压缩可达1000倍,且屏幕内容编码工具表现更优。
📝 摘要(中文)
本文针对灵巧手抓取中日益增长的多点触觉数据量带来的带宽压力,提出了一个多点触觉数据集(Dex-MPTD),用于评估触觉数据压缩算法。该数据集包含不同物体和抓取姿势下的多点触觉传感器数据。研究探索了Dex-MPTD数据集上的无损和有损压缩方法,将触觉数据转换为图像,并应用了六种无损和五种有损图像编解码器。实验结果表明,无损压缩可以将触觉数据压缩到低至0.0364 bpss,实现约200倍的压缩比。高效的有损压缩器(如HM和VTM)可以在保持可接受数据保真度的前提下,实现约1000倍的数据缩减。此外,针对屏幕内容的编码工具在触觉数据压缩方面优于通用编解码器。
🔬 方法详解
问题定义:论文旨在解决灵巧手触觉感知中,由于传感器数量增加导致的数据量过大,进而对数据传输带宽造成压力的问题。现有方法缺乏针对灵巧手物理结构的多点触觉数据压缩的深入研究,无法有效降低数据传输负担。
核心思路:论文的核心思路是将多点触觉传感器采集的数据转换成图像,然后利用成熟的图像压缩技术(包括无损和有损压缩)来降低数据量。这种方法利用了图像压缩算法在处理空间相关性方面的优势,从而实现高效的触觉数据压缩。
技术框架:整体流程包括:1) 构建多点触觉数据集(Dex-MPTD),包含不同物体和抓取姿势下的触觉数据;2) 将触觉数据转换为图像;3) 应用多种无损和有损图像编解码器进行压缩;4) 评估压缩效果,包括压缩比和数据保真度。主要模块包括数据采集、数据转换、压缩编码和解压缩。
关键创新:论文的关键创新在于将图像压缩技术应用于多点触觉数据的压缩,并验证了其有效性。此外,论文还发现针对屏幕内容的编码工具在触觉数据压缩方面表现优于通用编解码器,这为后续研究提供了新的方向。
关键设计:论文选择了多种无损压缩算法(如PNG, WebP lossless等)和有损压缩算法(如JPEG, HM, VTM等)进行对比实验。对于数据到图像的转换,具体转换方式未知,但目标是尽可能保留触觉数据的空间相关性。论文通过实验对比不同压缩算法的压缩比和数据保真度,从而选择最优的压缩方案。数据保真度的评估方法未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,在Dex-MPTD数据集上,无损压缩可以将触觉数据压缩到低至0.0364 bpss,实现约200倍的压缩比。高效的有损压缩器(如HM和VTM)可以在保持可接受数据保真度的前提下,实现约1000倍的数据缩减。此外,针对屏幕内容的编码工具在触觉数据压缩方面优于通用编解码器。
🎯 应用场景
该研究成果可应用于各种需要灵巧手进行操作的机器人应用场景,例如远程手术、危险环境下的物体操作、以及高精度装配等。通过降低触觉数据的传输带宽需求,可以提高机器人的响应速度和操作效率,并降低硬件成本。未来,该研究可以进一步扩展到其他类型的触觉传感器和机器人平台。
📄 摘要(原文)
Though robotic dexterous manipulation has progressed substantially recently, challenges like in-hand occlusion still necessitate fine-grained tactile perception, leading to the integration of more tactile sensors into robotic hands. Consequently, the increased data volume imposes substantial bandwidth pressure on signal transmission from the hand's controller. However, the acquisition and compression of multi-point tactile signals based on the dexterous hands' physical structures have not been thoroughly explored. In this paper, our contributions are twofold. First, we introduce a Multi-Point Tactile Dataset for Dexterous Hand Grasping (Dex-MPTD). This dataset captures tactile signals from multiple contact sensors across various objects and grasping poses, offering a comprehensive benchmark for advancing dexterous robotic manipulation research. Second, we investigate both lossless and lossy compression on Dex-MPTD by converting tactile data into images and applying six lossless and five lossy image codecs for efficient compression. Experimental results demonstrate that tactile data can be losslessly compressed to as low as 0.0364 bits per sub-sample (bpss), achieving approximately 200$\times$ compression ratio compared to the raw tactile data. Efficient lossy compressors like HM and VTM can achieve about 1000$\times$ data reductions while preserving acceptable data fidelity. The exploration of lossy compression also reveals that screen-content-targeted coding tools outperform general-purpose codecs in compressing tactile data.