Histo-Planner: A Real-time Local Planner for MAVs Teleoperation based on Histogram of Obstacle Distribution
作者: Ze Wang, Zhenyu Gao, Jingang Qu, Pascal Morin
分类: cs.RO
发布日期: 2025-05-21
💡 一句话要点
针对MAV遥操作,提出基于障碍物分布直方图的实时局部规划器Histo-Planner
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型飞行器 遥操作 局部规划 实时避障 障碍物直方图
📋 核心要点
- 现有MAV遥操作在复杂环境中面临计算资源有限和缺乏全局地图信息的挑战,导致难以实现实时的避障。
- Histo-Planner利用障碍物分布直方图进行实时轨迹规划,并设计规划器管理器根据障碍物位置切换规划模式。
- 通过仿真和室内实验验证了Histo-Planner在遥操作应用中的有效性,并进行了基准对比,展示了其性能。
📝 摘要(中文)
本文提出了一种用于微型飞行器(MAV)实时避障的局部规划器。考虑到计算能力受限的复杂环境中的遥操作应用,我们提出了一种不需要障碍物全局地图知识或构建过程的局部规划器。该解决方案包含一个依赖于障碍物分布直方图的实时轨迹规划算法,以及一个根据MAV周围障碍物位置触发不同规划模式的规划器管理器。通过仿真和室内实验,验证了该解决方案在遥操作应用中的有效性。同时,基于设计的仿真平台,提供了基准对比结果。
🔬 方法详解
问题定义:论文旨在解决微型飞行器(MAV)在复杂、计算资源有限且缺乏全局地图信息的环境中进行遥操作时,如何实现实时避障的问题。现有方法通常依赖于全局地图或计算复杂度高的算法,难以满足实时性和资源约束的需求。
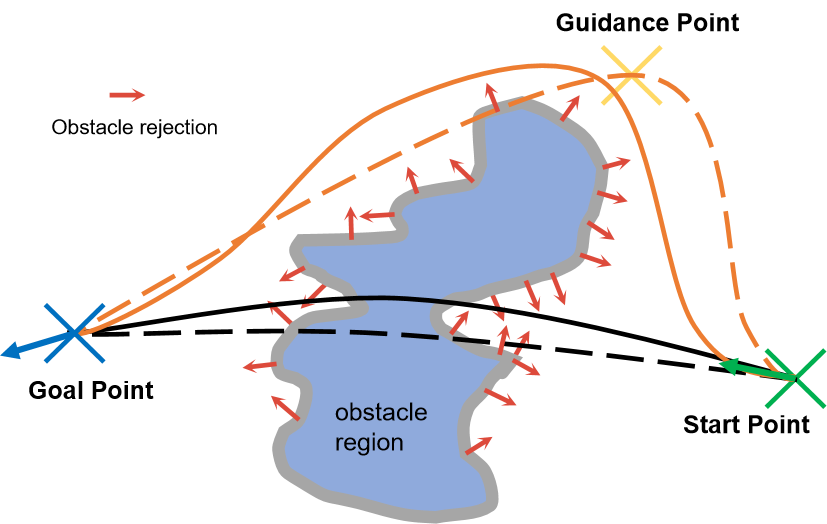
核心思路:论文的核心思路是利用障碍物分布的直方图来简化环境表示,从而降低计算复杂度,实现快速的轨迹规划。通过分析障碍物在不同方向上的分布情况,可以有效地识别出安全区域,并生成避开障碍物的轨迹。这种方法避免了构建全局地图的需要,更适合于资源受限的遥操作场景。
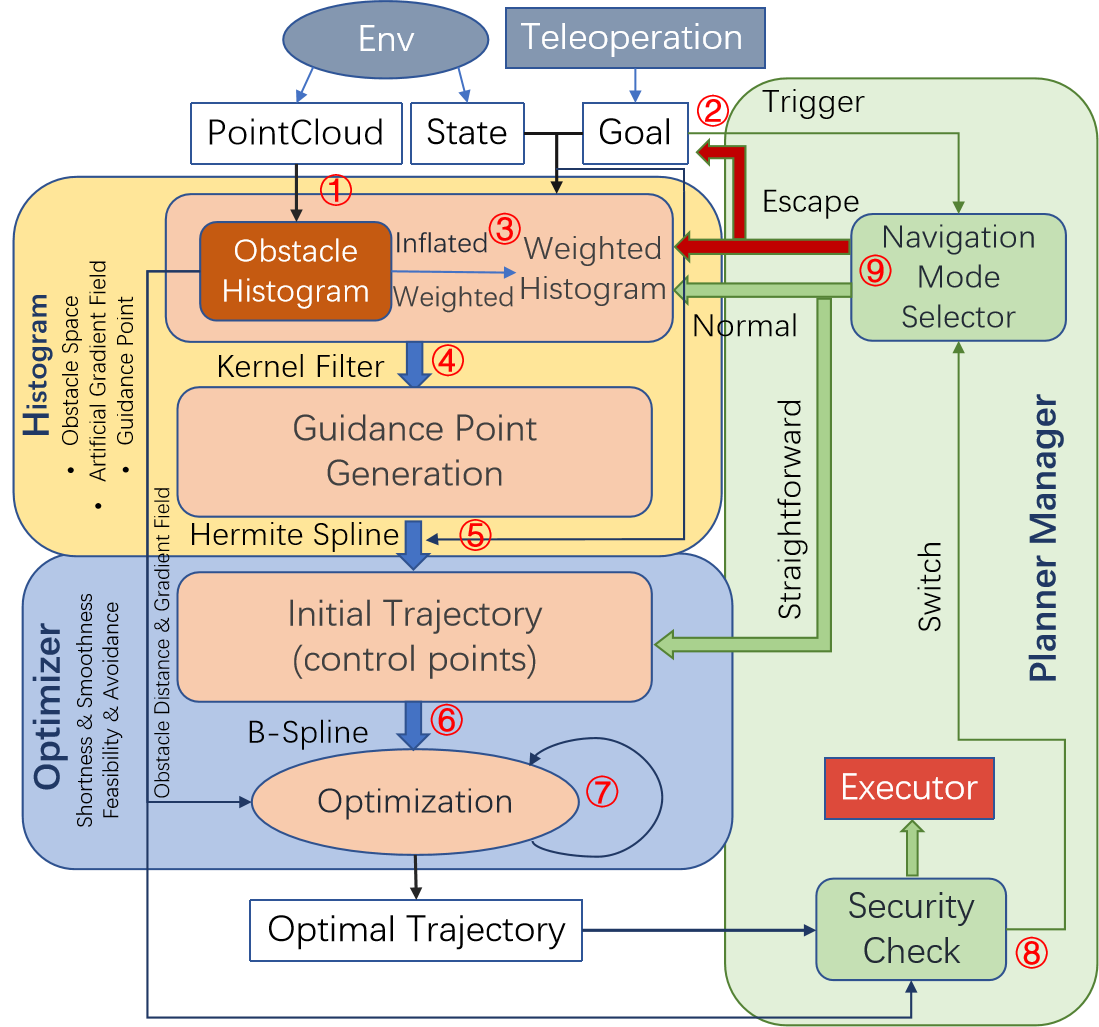
技术框架:Histo-Planner的整体框架包含两个主要模块:障碍物分布直方图构建模块和轨迹规划模块。首先,通过传感器获取周围环境的障碍物信息,并将其转换为障碍物分布直方图。然后,轨迹规划模块根据直方图的信息,生成一条安全且平滑的轨迹。此外,还包含一个规划器管理器,用于根据障碍物的位置和分布情况,动态地调整规划策略,例如切换不同的规划模式。
关键创新:该方法最重要的创新点在于使用障碍物分布直方图作为环境的表示方式。与传统的全局地图相比,直方图能够更简洁地描述环境信息,从而降低了计算复杂度。此外,规划器管理器的设计也使得系统能够根据不同的环境情况,自适应地调整规划策略,提高了系统的鲁棒性和适应性。
关键设计:障碍物分布直方图的关键参数包括直方图的分辨率(即bin的数量)和每个bin的范围。轨迹规划模块通常采用基于优化的方法,例如最小化轨迹的长度、曲率和与障碍物的距离等。规划器管理器需要设计合理的切换策略,例如根据障碍物的密度或距离来选择不同的规划模式。具体的损失函数和优化算法的选择会影响轨迹的质量和计算效率。
🖼️ 关键图片

📊 实验亮点
论文通过仿真和室内实验验证了Histo-Planner的有效性。仿真结果表明,Histo-Planner能够在复杂环境中实时生成安全轨迹,并成功避开障碍物。与传统的局部规划器相比,Histo-Planner在计算效率和轨迹质量方面均有显著提升。室内实验进一步验证了Histo-Planner在实际应用中的可行性,展示了其在遥操作场景中的潜力。具体的性能数据和对比基线在论文中有详细描述。
🎯 应用场景
Histo-Planner具有广泛的应用前景,尤其适用于资源受限和环境复杂的场景,如灾难救援、工业巡检、室内导航等。在这些场景中,MAV需要在没有全局地图的情况下,自主地避开障碍物并完成任务。该研究成果可以提高MAV在这些场景中的自主性和可靠性,降低对操作员的依赖,从而提高工作效率和安全性。未来,该方法可以进一步扩展到多智能体系统,实现协同避障和任务分配。
📄 摘要(原文)
This paper concerns real-time obstacle avoidance for micro aerial vehicles (MAVs). Motivated by teleoperation applications in cluttered environments with limited computational power, we propose a local planner that does not require the knowledge or construction of a global map of the obstacles. The proposed solution consists of a real-time trajectory planning algorithm that relies on the histogram of obstacle distribution and a planner manager that triggers different planning modes depending on obstacles location around the MAV. The proposed solution is validated, for a teleoperation application, with both simulations and indoor experiments. Benchmark comparisons based on a designed simulation platform are also provided.