RoboRAN: A Unified Robotics Framework for Reinforcement Learning-Based Autonomous Navigation
作者: Matteo El-Hariry, Antoine Richard, Ricard M. Castan, Luis F. W. Batista, Matthieu Geist, Cedric Pradalier, Miguel Olivares-Mendez
分类: cs.RO, cs.AI
发布日期: 2025-05-20 (更新: 2025-11-05)
备注: Accepted at Transactions on Machine Learning Research (TMLR)
💡 一句话要点
RoboRAN:用于强化学习自主导航的统一机器人框架,支持多平台部署。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 自主导航 机器人框架 sim-to-real 多域机器人
📋 核心要点
- 现有强化学习框架在机器人自主导航领域存在平台局限性,难以实现跨平台策略的泛化和公平比较。
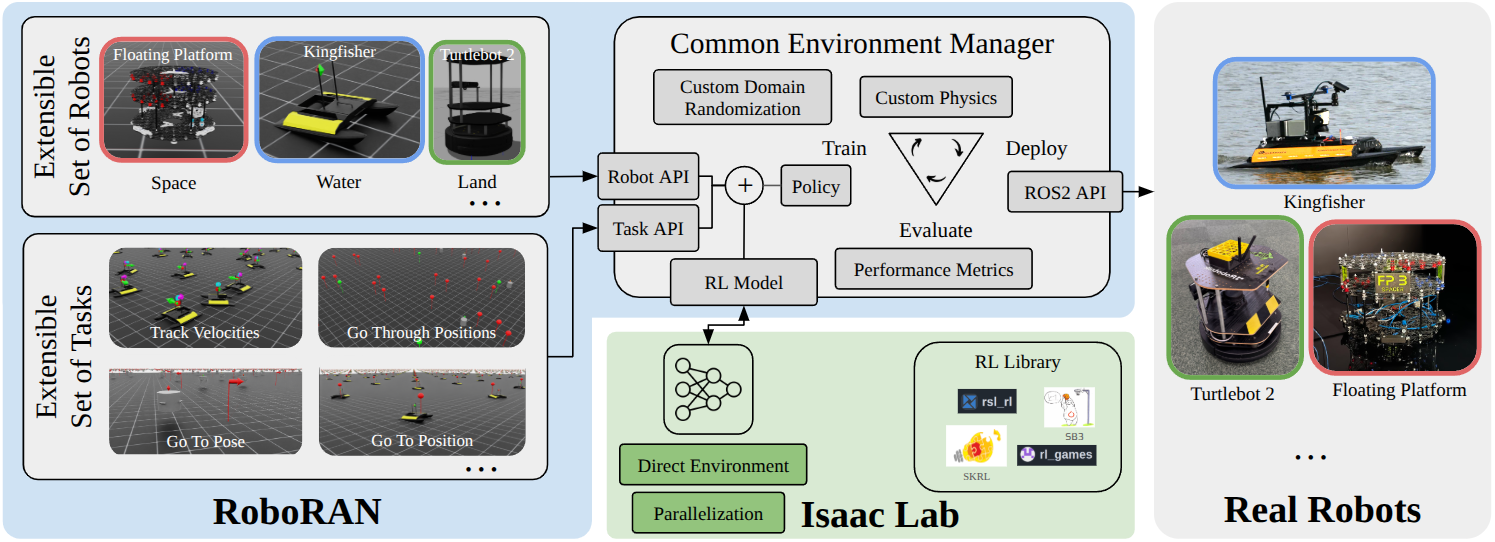
- RoboRAN框架通过模块化设计和统一接口,实现了不同机器人平台和任务的无缝切换,提升了策略的可复用性。
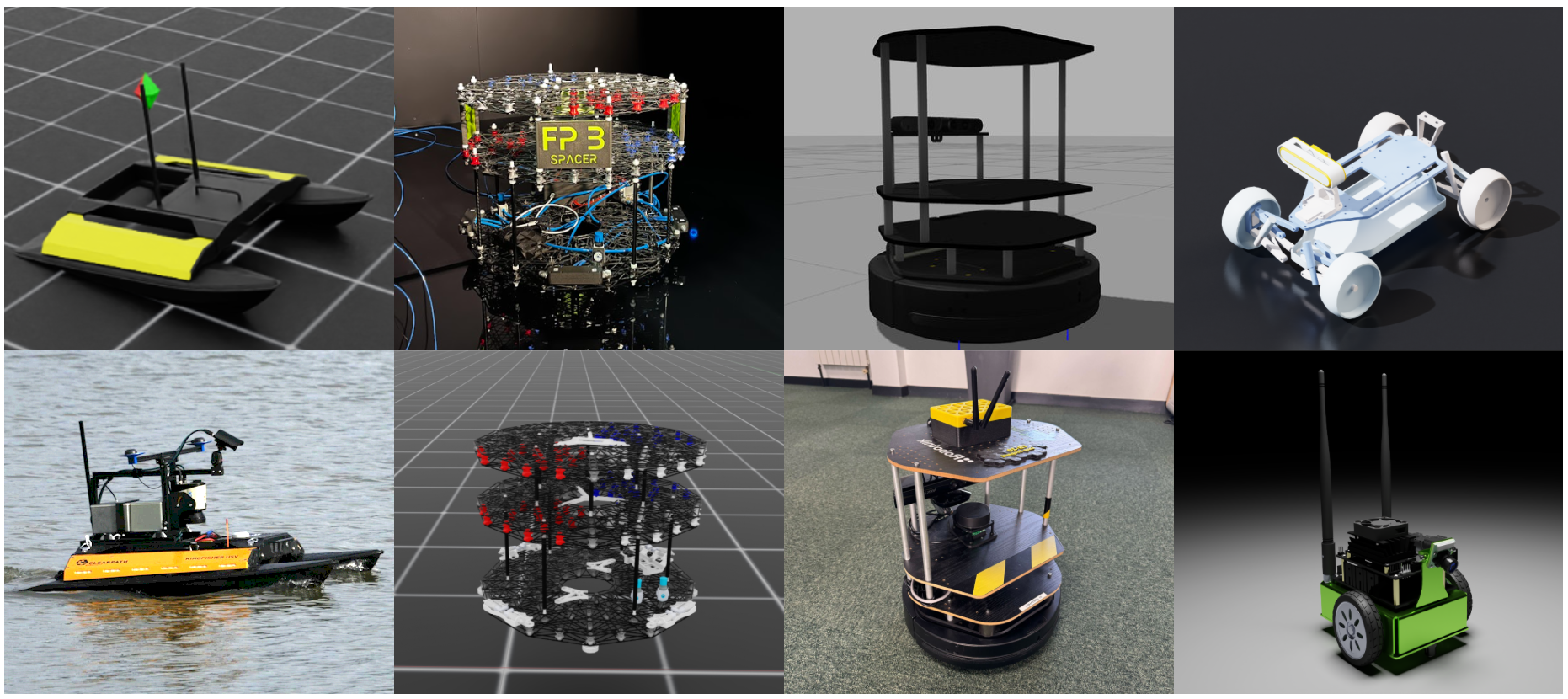
- 通过卫星、无人艇和地面车辆的实验验证了RoboRAN的sim-to-real迁移能力,并开源了API以加速实际部署。
📝 摘要(中文)
自主机器人在各种环境中导航和操作,从陆地和水域环境到空中和太空领域。虽然强化学习(RL)在训练特定自主机器人的策略方面显示出希望,但现有的框架和基准通常仅限于独特的平台,限制了不同移动系统之间的泛化和公平比较。本文提出了一个多域框架,用于在不同的机器人平台和操作环境中训练、评估和部署基于RL的导航策略。我们的工作提出了四个关键贡献:(1)一个可扩展和模块化的框架,促进了无缝的机器人-任务互换性和可重复的训练流程;(2)通过多个机器人的真实世界实验证明了sim-to-real迁移,包括卫星机器人模拟器、无人水面艇和轮式地面车辆;(3)发布了第一个开源API,用于将Isaac Lab训练的策略部署到真实机器人,从而实现轻量级推理和快速现场验证;(4)通过统一的评估测试平台,提供统一的任务和指标,以评估在不同操作条件(水域、陆地和太空)下的导航任务性能。通过确保仿真和真实世界部署之间的一致性,RoboRAN降低了开发适应性强的基于RL的导航策略的门槛。其模块化设计使得可以通过预定义的模板直接集成新的机器人和任务,从而促进了可重复性并扩展到不同的领域。为了支持社区,我们将RoboRAN作为开源发布。
🔬 方法详解
问题定义:论文旨在解决现有强化学习框架在机器人自主导航领域中,平台依赖性强、难以跨平台泛化的问题。现有方法通常针对特定机器人平台设计,缺乏通用性和可扩展性,导致训练出的策略难以迁移到其他平台或真实环境中。
核心思路:论文的核心思路是构建一个统一的、模块化的机器人框架RoboRAN,该框架能够支持多种机器人平台和任务,并提供统一的接口和评估标准。通过在仿真环境中训练策略,并利用sim-to-real技术将其迁移到真实机器人上,从而降低开发成本和提高部署效率。
技术框架:RoboRAN框架包含以下主要模块:1) 机器人模型库:包含多种机器人平台的模型,如卫星、无人艇、地面车辆等;2) 任务定义模块:定义各种导航任务,如路径规划、避障等;3) 强化学习训练模块:使用Isaac Lab等仿真环境进行策略训练;4) sim-to-real迁移模块:将训练好的策略迁移到真实机器人上;5) 评估模块:提供统一的评估指标,用于评估策略在不同平台和任务上的性能。
关键创新:RoboRAN的关键创新在于其统一性和模块化设计。它提供了一个通用的框架,可以方便地集成新的机器人平台和任务,并支持跨平台的策略迁移和评估。此外,论文还开源了API,使得用户可以方便地将训练好的策略部署到真实机器人上。
关键设计:RoboRAN框架的关键设计包括:1) 使用统一的机器人描述格式,方便集成不同平台的机器人模型;2) 提供统一的传感器接口,使得策略可以方便地获取环境信息;3) 使用模块化的奖励函数设计,方便定义不同的导航任务;4) 采用域随机化等技术,提高sim-to-real迁移的鲁棒性。
🖼️ 关键图片
📊 实验亮点
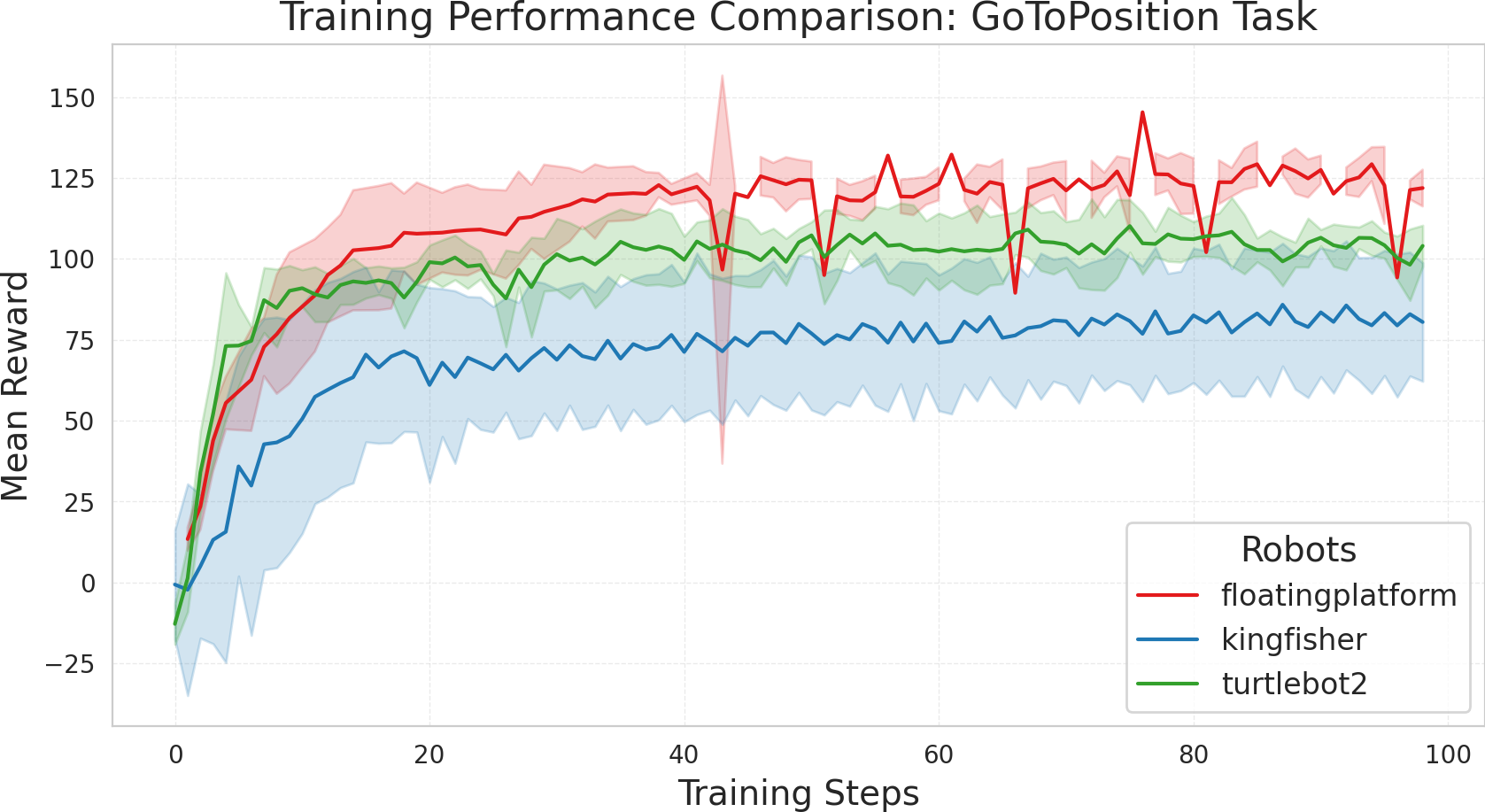
论文通过在卫星机器人模拟器、无人水面艇和轮式地面车辆上进行实验,验证了RoboRAN框架的有效性。实验结果表明,使用RoboRAN训练的策略能够成功地迁移到真实机器人上,并在各种导航任务中表现出良好的性能。此外,论文还开源了API,使得用户可以方便地将训练好的策略部署到真实机器人上,加速了实际应用。
🎯 应用场景
RoboRAN框架可应用于各种需要自主导航的机器人系统,例如:无人驾驶车辆、无人水面艇、无人机、太空机器人等。该框架能够降低开发成本,加速策略部署,并提高机器人在复杂环境中的适应性。未来,RoboRAN有望推动机器人技术在物流、巡检、救援等领域的广泛应用。
📄 摘要(原文)
Autonomous robots must navigate and operate in diverse environments, from terrestrial and aquatic settings to aerial and space domains. While Reinforcement Learning (RL) has shown promise in training policies for specific autonomous robots, existing frameworks and benchmarks are often constrained to unique platforms, limiting generalization and fair comparisons across different mobility systems. In this paper, we present a multi-domain framework for training, evaluating and deploying RL-based navigation policies across diverse robotic platforms and operational environments. Our work presents four key contributions: (1) a scalable and modular framework, facilitating seamless robot-task interchangeability and reproducible training pipelines; (2) sim-to-real transfer demonstrated through real-world experiments with multiple robots, including a satellite robotic simulator, an unmanned surface vessel, and a wheeled ground vehicle; (3) the release of the first open-source API for deploying Isaac Lab-trained policies to real robots, enabling lightweight inference and rapid field validation; and (4) uniform tasks and metrics for cross-medium evaluation, through a unified evaluation testbed to assess performance of navigation tasks in diverse operational conditions (aquatic, terrestrial and space). By ensuring consistency between simulation and real-world deployment, RoboRAN lowers the barrier to developing adaptable RL-based navigation strategies. Its modular design enables straightforward integration of new robots and tasks through predefined templates, fostering reproducibility and extension to diverse domains. To support the community, we release RoboRAN as open-source.