MultiDrive: A Co-Simulation Framework Bridging 2D and 3D Driving Simulation for AV Software Validation
作者: Marc Kaufeld, Korbinian Moller, Alessio Gambi, Paolo Arcaini, Johannes Betz
分类: cs.RO
发布日期: 2025-05-20
备注: 7 pages, Submitted to the IEEE International Conference on Intelligent Transportation Systems (ITSC 2025), Australia
🔗 代码/项目: GITHUB
💡 一句话要点
MultiDrive:桥接2D和3D驾驶仿真的AV软件验证协同仿真框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶 仿真测试 协同仿真 场景生成 运动规划
📋 核心要点
- 自动驾驶软件验证面临低保真仿真效率高但真实性不足,高保真仿真真实但成本高的两难选择。
- MultiDrive框架通过多智能体协同仿真和程序化场景生成,实现低高保真仿真间的场景无缝迁移和测试自动化。
- 实验表明,该框架能有效发现运动规划器在不同仿真环境下的行为差异,暴露规划假设的潜在问题。
📝 摘要(中文)
本文提出了一种新颖的框架,该框架利用多智能体协同仿真和程序化场景生成,以支持在低保真和高保真仿真器之间进行基于场景的测试,用于运动规划算法的开发。该框架限制了在仿真器之间转换场景所需的工作量,并自动化了实验执行、轨迹分析和可视化。使用参考运动规划器的实验表明,该框架揭示了规划器预期行为与实际行为之间的差异,从而在更真实的条件下暴露了规划假设中的弱点。该框架可在https://github.com/TUM-AVS/MultiDrive获取。
🔬 方法详解
问题定义:自动驾驶(AV)软件的验证依赖于仿真测试,但现有方法需要在低保真2D仿真器(用于高效探索场景空间)和高保真3D仿真器(用于详细研究相关场景)之间做出选择。低保真仿真虽然效率高,但与真实环境存在差距;高保真仿真虽然更真实,但计算成本更高,难以进行大规模测试。因此,如何降低测试成本,同时减小仿真与现实之间的差距,是一个关键问题。
核心思路:MultiDrive框架的核心思路是利用多智能体协同仿真,将低保真和高保真仿真器连接起来,实现场景在不同仿真器之间的无缝迁移。通过程序化场景生成,可以自动创建各种测试场景,并自动化实验执行、轨迹分析和可视化,从而提高测试效率和覆盖率。
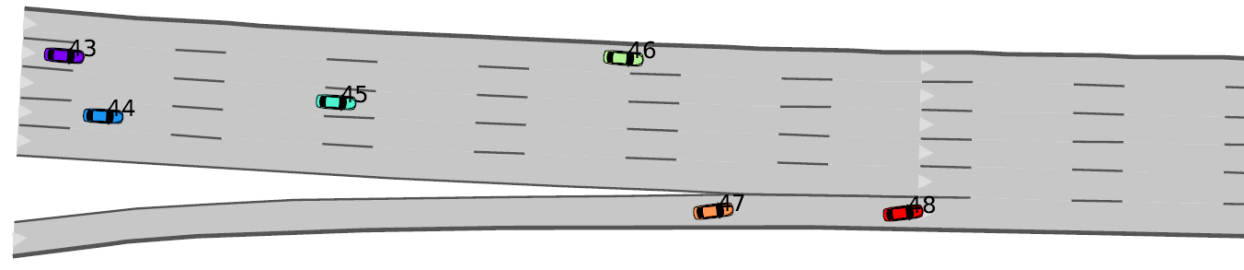
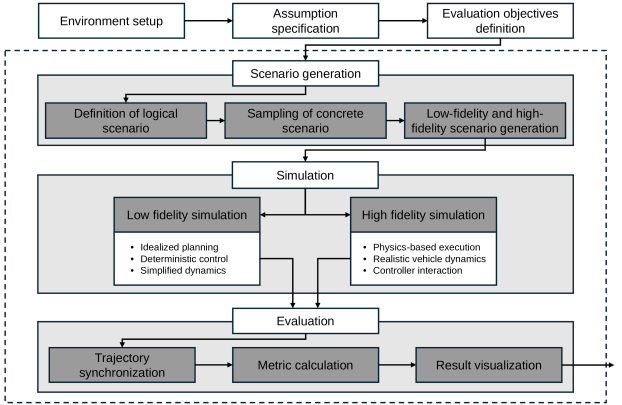
技术框架:MultiDrive框架包含以下主要模块:1) 场景生成器:用于程序化生成各种测试场景。2) 协同仿真管理器:负责协调低保真和高保真仿真器之间的交互。3) 实验执行器:自动化执行测试实验。4) 轨迹分析器:分析仿真结果,检测规划器行为的异常。5) 可视化工具:用于可视化仿真场景和结果。整体流程是从场景生成器生成场景,然后通过协同仿真管理器将场景分发到不同的仿真器中进行仿真,最后通过轨迹分析器分析结果并进行可视化。
关键创新:MultiDrive框架的关键创新在于其多智能体协同仿真能力,能够将低保真和高保真仿真器连接起来,实现场景在不同仿真器之间的无缝迁移。这种协同仿真方法可以充分利用不同仿真器的优势,提高测试效率和覆盖率,同时减小仿真与现实之间的差距。此外,程序化场景生成和自动化实验执行也显著降低了测试成本。
关键设计:MultiDrive框架的关键设计包括:1) 场景生成器的参数化设计,允许用户灵活控制场景的各种属性,例如车辆数量、道路布局、交通规则等。2) 协同仿真管理器采用消息传递机制,实现不同仿真器之间的实时通信。3) 轨迹分析器使用各种指标来评估规划器的性能,例如轨迹平滑度、安全性、效率等。4) 框架提供了一套API,方便用户集成自定义的仿真器和规划器。
🖼️ 关键图片

📊 实验亮点
实验结果表明,MultiDrive框架能够有效地发现运动规划器在不同仿真环境下的行为差异。例如,在某些高保真仿真场景中,规划器可能会出现轨迹不平滑、碰撞等问题,而在低保真仿真中这些问题可能不会显现。通过MultiDrive框架,开发者可以及时发现这些问题,并进行相应的改进,从而提高规划器的性能和安全性。
🎯 应用场景
MultiDrive框架可广泛应用于自动驾驶软件的验证和测试,特别是在运动规划算法的开发和评估方面。该框架可以帮助开发者在各种仿真环境下测试其算法的性能,发现潜在的问题,并提高算法的鲁棒性和安全性。此外,该框架还可以用于自动驾驶系统的性能评估和安全性认证。
📄 摘要(原文)
Scenario-based testing using simulations is a cornerstone of Autonomous Vehicles (AVs) software validation. So far, developers needed to choose between low-fidelity 2D simulators to explore the scenario space efficiently, and high-fidelity 3D simulators to study relevant scenarios in more detail, thus reducing testing costs while mitigating the sim-to-real gap. This paper presents a novel framework that leverages multi-agent co-simulation and procedural scenario generation to support scenario-based testing across low- and high-fidelity simulators for the development of motion planning algorithms. Our framework limits the effort required to transition scenarios between simulators and automates experiment execution, trajectory analysis, and visualization. Experiments with a reference motion planner show that our framework uncovers discrepancies between the planner's intended and actual behavior, thus exposing weaknesses in planning assumptions under more realistic conditions. Our framework is available at: https://github.com/TUM-AVS/MultiDrive