APEX: Empowering LLMs with Physics-Based Task Planning for Real-time Insight
作者: Wanjing Huang, Weixiang Yan, Zhen Zhang, Ambuj Singh
分类: cs.RO, cs.AI
发布日期: 2025-05-20 (更新: 2025-10-16)
🔗 代码/项目: GITHUB
💡 一句话要点
APEX:利用物理驱动的任务规划增强LLM的实时洞察力
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 物理引擎 任务规划 动态交互 机器人操作
📋 核心要点
- 现有方法难以捕捉动态对象交互,或需要特定任务训练,限制了LLM在现实物理环境中的应用。
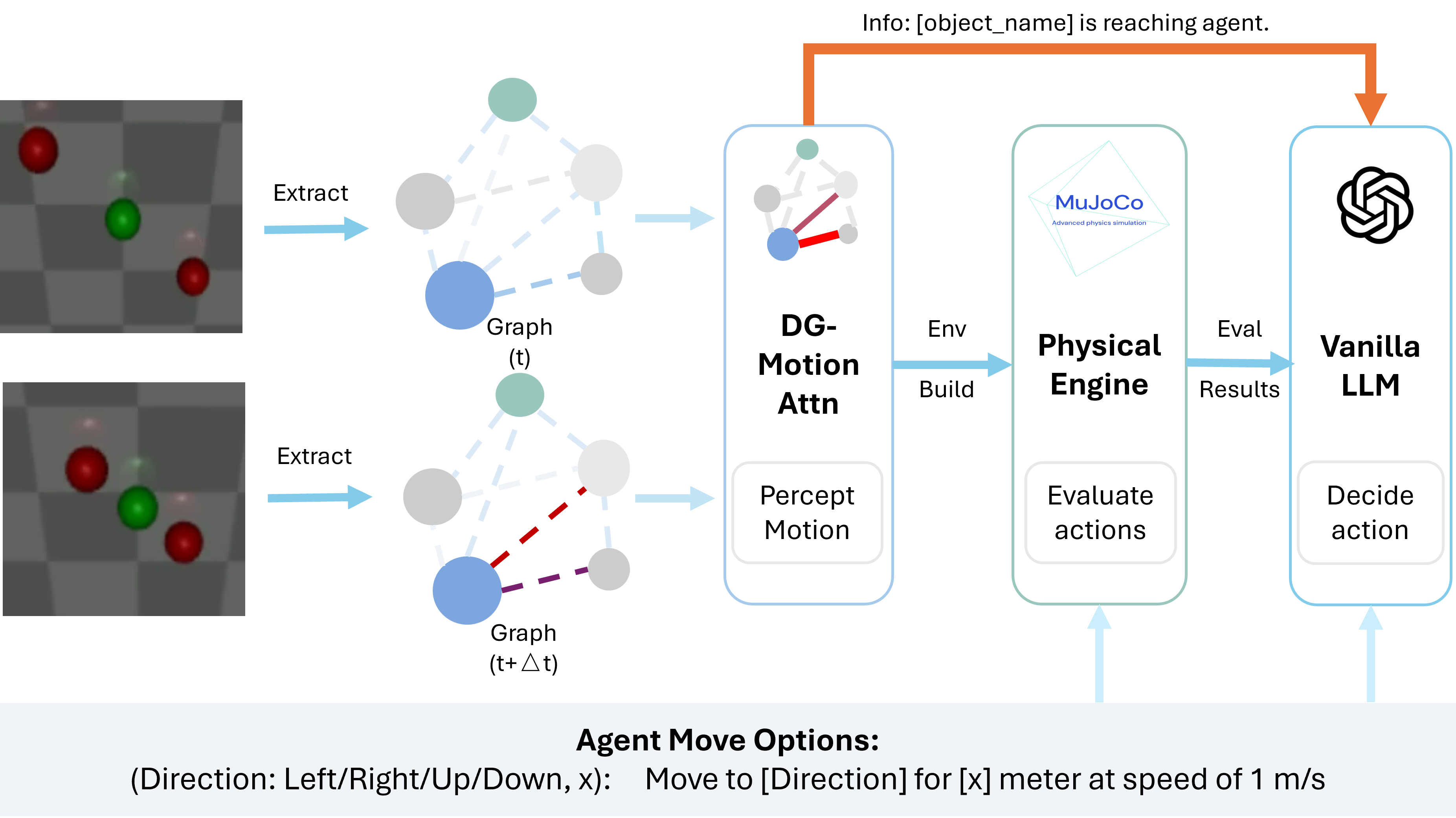
- APEX通过构建结构化图建模动态交互,并提供低延迟前向模拟,使LLM能基于预测结果规划任务。
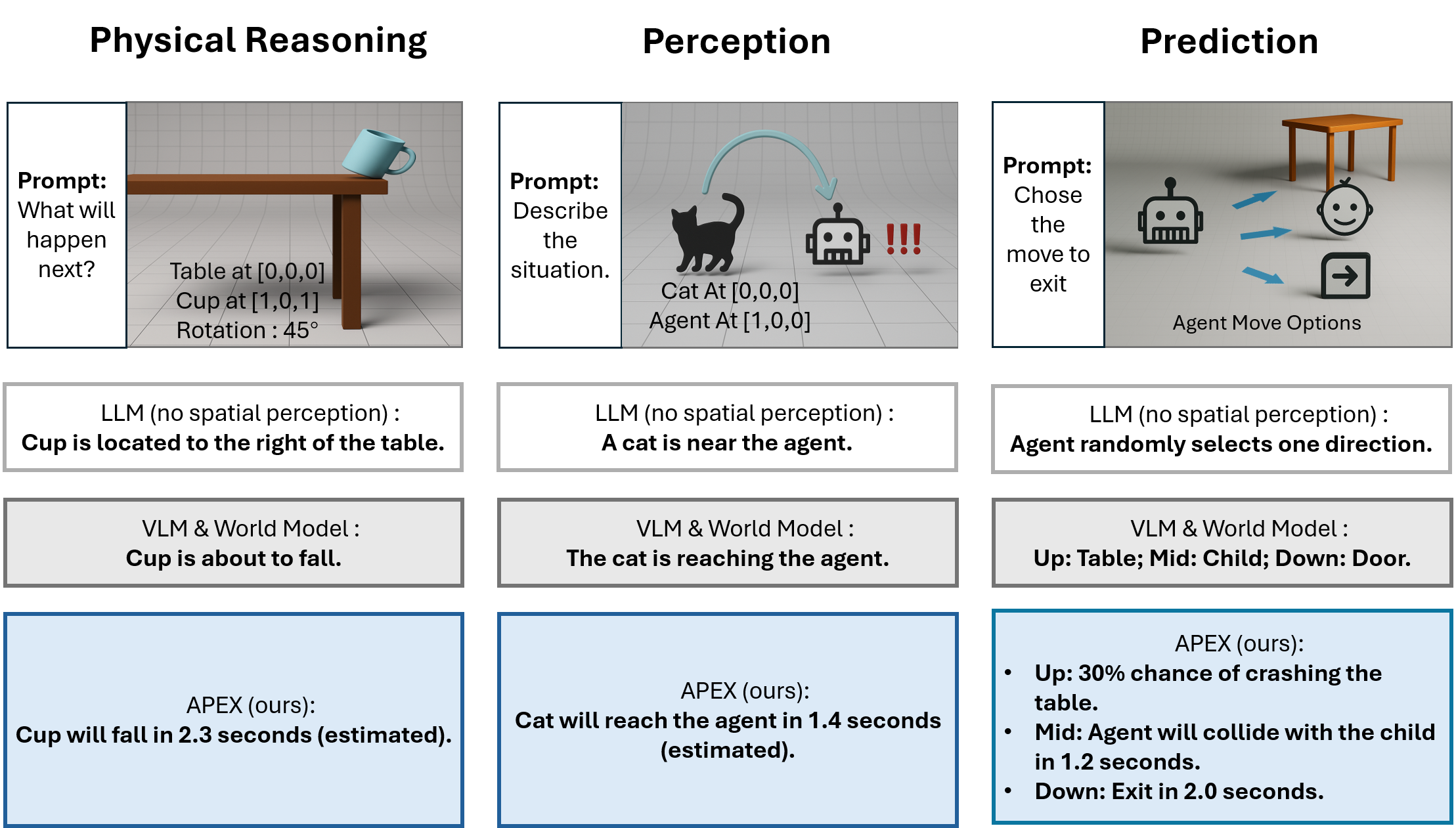
- 实验表明,APEX在物理推理、俄罗斯方块和动态避障等任务上显著优于标准LLM和VLM模型。
📝 摘要(中文)
大型语言模型(LLM)在推理和任务规划方面表现出强大的能力,但在物理交互建模方面存在根本性限制。现有方法通过视觉-语言模型(VLM)集成感知或通过强化学习(RL)进行自适应决策,但它们无法捕捉动态对象交互,或需要特定于任务的训练,从而限制了其在现实世界中的适用性。我们引入了APEX(Anticipatory Physics-Enhanced Execution),该框架使LLM具备物理驱动的预测能力,用于实时任务规划。APEX构建结构化图以识别和建模环境中最重要的动态交互,为LLM提供显式的物理状态更新。同时,APEX提供物理上可行的动作的低延迟前向模拟,使LLM能够基于预测结果而非静态观察来选择最佳策略。我们在三个基准上评估APEX,这些基准旨在评估感知、预测和决策:(1) 物理推理基准,测试因果推理和对象运动预测;(2) 俄罗斯方块,评估物理信息预测是否增强了长时程规划任务中的决策性能;(3) 动态避障,评估感知和动作可行性分析的即时集成。APEX显著优于标准LLM和基于VLM的模型,证明了显式物理推理对于弥合基于语言的智能和现实世界任务执行之间的差距的必要性。源代码和实验设置可在https://github.com/hwj20/APEX_EXP公开获取。
🔬 方法详解
问题定义:论文旨在解决LLM在现实物理环境中进行任务规划时,由于缺乏对物理交互的建模能力而导致的性能瓶颈。现有方法,如基于VLM的感知和基于RL的决策,要么无法有效捕捉动态对象间的复杂交互,要么需要针对特定任务进行训练,泛化能力不足。
核心思路:APEX的核心思路是赋予LLM物理驱动的预测能力,使其能够像人类一样,在规划任务时考虑到物理世界的规律。通过显式地建模环境中的动态交互,并提供动作的物理可行性模拟,APEX使LLM能够基于预测的未来状态而非静态的当前状态进行决策。
技术框架:APEX框架主要包含以下几个模块:1) 环境感知模块:用于获取环境的初始状态信息。2) 动态交互建模模块:构建结构化图来识别和建模环境中最重要的动态交互,并提供物理状态更新。3) 动作可行性模拟模块:提供低延迟的前向模拟,预测不同动作的物理结果。4) LLM决策模块:基于动态交互建模和动作可行性模拟的结果,LLM选择最优的策略。整个流程是循环迭代的,LLM的决策会影响环境状态,进而影响后续的交互建模和动作模拟。
关键创新:APEX的关键创新在于将物理引擎集成到LLM的任务规划流程中,使LLM能够进行物理驱动的预测。与现有方法相比,APEX不是简单地依赖视觉感知或强化学习,而是显式地建模物理交互,并利用物理模拟来评估动作的可行性和预测结果。这种方法使得LLM能够更好地理解和适应现实物理环境。
关键设计:APEX的关键设计包括:1) 结构化图的构建方式,如何选择和建模重要的动态交互。2) 物理模拟器的选择和优化,需要在精度和速度之间进行权衡,以保证低延迟的反馈。3) LLM的输入表示,如何将物理状态信息有效地传递给LLM,以便其进行决策。论文中可能还涉及一些损失函数的设计,用于指导LLM学习如何利用物理信息进行任务规划,但具体细节未知。
🖼️ 关键图片
📊 实验亮点
APEX在三个基准测试中均取得了显著的性能提升。在物理推理基准上,APEX展现了强大的因果推理和对象运动预测能力。在俄罗斯方块游戏中,APEX通过物理信息预测显著提升了决策性能。在动态避障任务中,APEX能够实时集成感知和动作可行性分析,实现有效的避障。具体提升幅度未知,但论文强调APEX显著优于标准LLM和基于VLM的模型。
🎯 应用场景
APEX具有广泛的应用前景,例如机器人操作、自动驾驶、游戏AI等。它可以帮助机器人在复杂的物理环境中更好地完成任务,例如物体抓取、路径规划、避障等。通过赋予LLM物理预测能力,APEX可以提高机器人的自主性和适应性,使其能够更好地与人类协作,并解决现实世界中的各种挑战。
📄 摘要(原文)
Large Language Models (LLMs) demonstrate strong reasoning and task planning capabilities but remain fundamentally limited in physical interaction modeling. Existing approaches integrate perception via Vision-Language Models (VLMs) or adaptive decision-making through Reinforcement Learning (RL), but they fail to capture dynamic object interactions or require task-specific training, limiting their real-world applicability. We introduce APEX (Anticipatory Physics-Enhanced Execution), a framework that equips LLMs with physics-driven foresight for real-time task planning. APEX constructs structured graphs to identify and model the most relevant dynamic interactions in the environment, providing LLMs with explicit physical state updates. Simultaneously, APEX provides low-latency forward simulations of physically feasible actions, allowing LLMs to select optimal strategies based on predictive outcomes rather than static observations. We evaluate APEX on three benchmarks designed to assess perception, prediction, and decision-making: (1) Physics Reasoning Benchmark, testing causal inference and object motion prediction; (2) Tetris, evaluating whether physics-informed prediction enhances decision-making performance in long-horizon planning tasks; (3) Dynamic Obstacle Avoidance, assessing the immediate integration of perception and action feasibility analysis. APEX significantly outperforms standard LLMs and VLM-based models, demonstrating the necessity of explicit physics reasoning for bridging the gap between language-based intelligence and real-world task execution. The source code and experiment setup are publicly available at https://github.com/hwj20/APEX_EXP .