Duawlfin: A Drone with Unified Actuation for Wheeled Locomotion and Flight Operation
作者: Jerry Tang, Ruiqi Zhang, Kaan Beyduz, Yiwei Jiang, Cody Wiebe, Haoyu Zhang, Osaruese Asoro, Mark W. Mueller
分类: cs.RO
发布日期: 2025-05-20
备注: 8 pages, 8 figures
💡 一句话要点
Duawlfin:一种采用统一驱动方式,实现轮式运动和飞行操作的无人机
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 混合无人机 轮式运动 飞行操作 统一驱动 差速传动
📋 核心要点
- 现有混合无人机设计通常需要额外的执行器或螺旋桨进行地面推进,导致机械结构复杂、能耗高,且螺旋桨易扬起灰尘干扰传感器。
- Duawlfin通过统一四旋翼电机的驱动,并引入带单向轴承的差速传动系统,实现了轮式运动和飞行操作,简化了机械结构。
- 实验结果表明,Duawlfin在飞行模式下具有与传统四旋翼相当的性能,在地面模式下能够高效爬坡和进行敏捷转弯,并能实现模式间的无缝切换。
📝 摘要(中文)
本文介绍了一种名为Duawlfin的无人机,它采用统一的驱动方式,能够实现轮式运动和飞行操作,从而实现高效的双向地面移动。与现有的混合设计不同,Duawlfin仅利用其标准的四旋翼电机,并通过引入带有单向轴承的差速传动系统,消除了对额外执行器或螺旋桨驱动地面推进的需求。这项创新简化了机械系统,显著降低了能源消耗,并防止了螺旋桨在地面附近旋转所引起的干扰,例如灰尘对传感器的影响。此外,单向轴承最大限度地减少了电机到螺旋桨在地面模式下的功率传递,这使得车辆能够在人类附近安全运行。我们提供了详细的机械设计,提出了用于快速和平稳模式转换的控制策略,并通过广泛的实验测试验证了该概念。飞行模式测试证实了与传统四旋翼飞行器相当的稳定飞行性能,而地面模式实验表明了高效的斜坡攀爬(高达30°)和接近1g横向加速度的敏捷转弯动作。空中和地面模式之间的无缝转换进一步强调了我们的方法在城市物流和室内导航等应用中的实用性和有效性。所有材料,包括3D模型文件、演示视频和其他资源,均已在https://sites.google.com/view/Duawlfin上开源。
🔬 方法详解
问题定义:现有混合无人机设计为了实现地面移动能力,通常需要额外的电机或螺旋桨驱动,这增加了无人机的复杂性、重量和能耗。此外,螺旋桨在地面附近旋转容易扬起灰尘,干扰无人机的传感器,影响其导航和感知能力。
核心思路:Duawlfin的核心思路是利用四旋翼无人机原有的四个电机,通过巧妙的机械设计,实现飞行和轮式地面移动的统一驱动。通过引入带有单向轴承的差速传动系统,使得电机既可以驱动螺旋桨进行飞行,也可以驱动轮子进行地面移动,而无需额外的执行器。
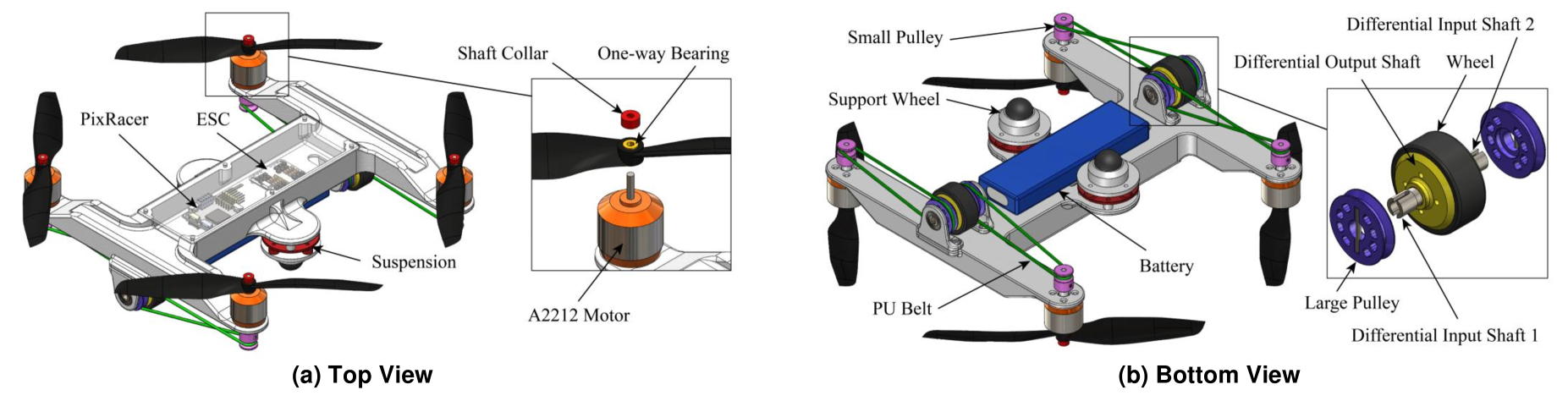
技术框架:Duawlfin的整体架构包括四个电机、螺旋桨、带有单向轴承的差速传动系统和轮子。在飞行模式下,电机驱动螺旋桨产生升力和推力,实现无人机的飞行。在地面模式下,电机通过差速传动系统驱动轮子,实现无人机的地面移动。控制系统负责实现飞行模式和地面模式之间的平滑切换,并控制无人机的运动。
关键创新:Duawlfin最重要的技术创新点在于其统一驱动的设计,即使用同一组电机同时实现飞行和轮式地面移动。这种设计避免了使用额外的执行器,简化了机械结构,降低了能耗,并减少了螺旋桨对传感器的干扰。单向轴承的设计是实现统一驱动的关键,它允许电机在不同模式下以不同的方式驱动螺旋桨和轮子。
关键设计:单向轴承的设计允许动力单向传递,从而在地面模式下,电机主要驱动轮子,而传递到螺旋桨的动力最小化,保证了安全性。差速传动系统允许左右轮子以不同的速度旋转,从而实现转弯。控制算法需要根据无人机的状态和目标,动态调整电机的转速,实现飞行模式和地面模式之间的平滑切换,并控制无人机的运动轨迹。
🖼️ 关键图片


📊 实验亮点
实验结果表明,Duawlfin在飞行模式下具有与传统四旋翼飞行器相当的稳定飞行性能。在地面模式下,Duawlfin能够高效地攀爬高达30°的斜坡,并能够进行接近1g横向加速度的敏捷转弯。此外,实验还验证了Duawlfin能够在飞行模式和地面模式之间实现平滑的切换,进一步证明了其在实际应用中的可行性。
🎯 应用场景
Duawlfin的设计理念使其非常适合城市物流和室内导航等应用场景。其轮式运动能力使其能够在复杂的地面环境中高效移动,而飞行能力则使其能够跨越障碍物和到达难以到达的区域。这种混合运动模式可以显著提高物流效率,并为室内导航提供更灵活的解决方案。未来,Duawlfin有望在包裹递送、仓库管理、安防巡逻等领域发挥重要作用。
📄 摘要(原文)
This paper presents Duawlfin, a drone with unified actuation for wheeled locomotion and flight operation that achieves efficient, bidirectional ground mobility. Unlike existing hybrid designs, Duawlfin eliminates the need for additional actuators or propeller-driven ground propulsion by leveraging only its standard quadrotor motors and introducing a differential drivetrain with one-way bearings. This innovation simplifies the mechanical system, significantly reduces energy usage, and prevents the disturbance caused by propellers spinning near the ground, such as dust interference with sensors. Besides, the one-way bearings minimize the power transfer from motors to propellers in the ground mode, which enables the vehicle to operate safely near humans. We provide a detailed mechanical design, present control strategies for rapid and smooth mode transitions, and validate the concept through extensive experimental testing. Flight-mode tests confirm stable aerial performance comparable to conventional quadcopters, while ground-mode experiments demonstrate efficient slope climbing (up to 30°) and agile turning maneuvers approaching 1g lateral acceleration. The seamless transitions between aerial and ground modes further underscore the practicality and effectiveness of our approach for applications like urban logistics and indoor navigation. All the materials including 3-D model files, demonstration video and other assets are open-sourced at https://sites.google.com/view/Duawlfin.