Dynamic Bipedal MPC with Foot-level Obstacle Avoidance and Adjustable Step Timing
作者: Tianze Wang, Christian Hubicki
分类: cs.RO, eess.SY
发布日期: 2025-05-19
💡 一句话要点
提出一种足端避障和步态时序调整的动态双足机器人MPC控制框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双足机器人 模型预测控制 运动规划 足端避障 步态时序调整
📋 核心要点
- 双足机器人在复杂环境中面临碰撞风险,现有方法在身体和足端避障方面存在不足。
- 该论文提出一种MPC框架,通过调整步态时序和优化足端轨迹来实现动态避障。
- 在Cassie和Digit机器人仿真及硬件实验中验证了算法的有效性,提升了避障性能。
📝 摘要(中文)
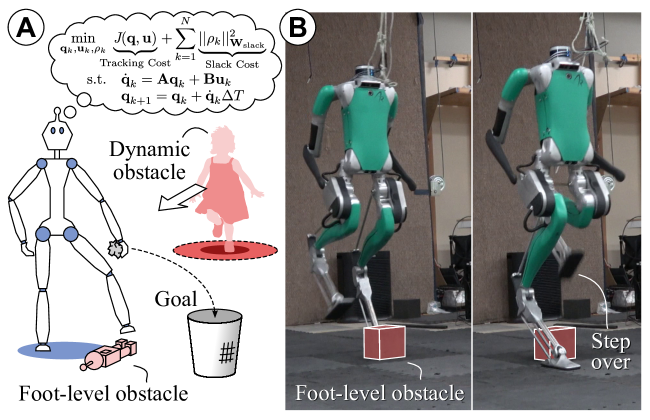
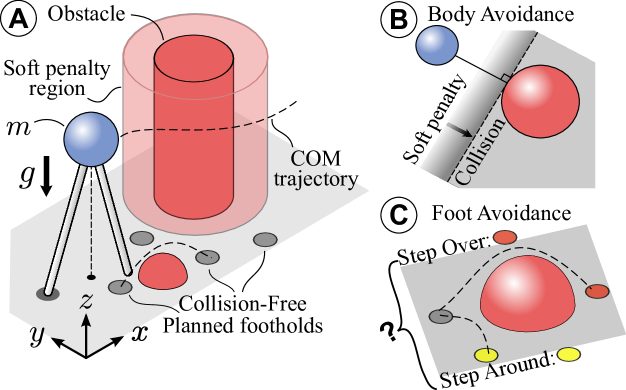
本文提出了一种实时的模型预测控制(MPC)框架,用于解决动态双足机器人在非结构化环境中运行时的身体和足端避障问题。主要贡献包括:(1) 一种新颖的步态时序调整方法,以加速身体避障;(2) 一种新颖的3D足端避障方法,该方法隐式地选择跨越或绕过障碍物的摆动轨迹和落脚点,同时考虑质心(COM)动力学。通过对安全区域进行半空间松弛来实现身体避障,并引入基于跟踪误差的切换启发式方法来检测改变步态时序的需求。为了实现足端避障,并在足端障碍物的所有侧面实现可行的落脚点,我们将地面上的非凸安全区域分解为多个凸多边形,并使用混合整数二次规划来确定最佳候选点。我们发现,引入软最小行进距离约束可以有效地防止MPC陷入局部最小值,从而避免半空间松弛方法在障碍物后方停滞。所提出的算法已在双足机器人平台Cassie和Digit的多体仿真以及Digit的硬件实验中得到验证。
🔬 方法详解
问题定义:双足机器人在非结构化环境中运动时,需要同时考虑身体和足端的避障问题。现有的方法可能无法有效地处理复杂的障碍物环境,或者在避障过程中导致机器人运动不稳定。此外,如何动态调整步态时序以适应不同的避障需求也是一个挑战。
核心思路:该论文的核心思路是通过模型预测控制(MPC)框架,同时优化机器人的质心运动和足端轨迹,以实现动态避障。通过调整步态时序,可以更快地响应障碍物,并避免身体碰撞。通过将非凸安全区域分解为凸多边形,并使用混合整数二次规划,可以有效地选择可行的落脚点,从而实现足端避障。
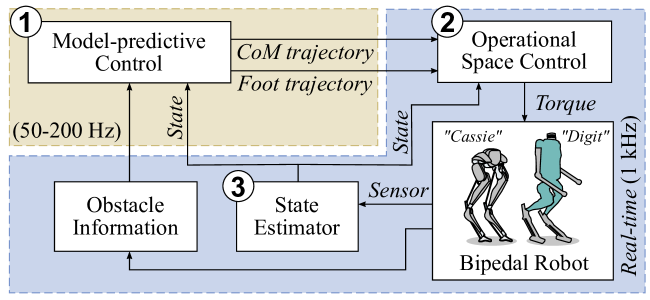
技术框架:该MPC框架主要包含以下几个模块:(1) 状态估计模块,用于估计机器人的当前状态;(2) 运动规划模块,使用MPC算法生成机器人的运动轨迹;(3) 足端轨迹生成模块,根据MPC的输出,生成足端的摆动轨迹和落脚点;(4) 控制器模块,将MPC的输出转化为机器人的关节控制指令。该框架采用分层控制结构,上层MPC负责全局运动规划,下层控制器负责局部轨迹跟踪。
关键创新:该论文的关键创新在于:(1) 提出了一种新颖的步态时序调整方法,可以根据跟踪误差动态调整步态时序,从而更快地响应障碍物;(2) 提出了一种新颖的3D足端避障方法,该方法可以将非凸安全区域分解为凸多边形,并使用混合整数二次规划来选择可行的落脚点。与现有方法相比,该方法可以更有效地处理复杂的障碍物环境,并保证机器人的运动稳定。
关键设计:在步态时序调整方面,论文使用基于跟踪误差的切换启发式方法来检测改变步态时序的需求。在足端避障方面,论文引入了一个软最小行进距离约束,以防止MPC陷入局部最小值。此外,论文还对MPC的权重参数进行了仔细调整,以保证机器人的运动稳定性和避障性能。
🖼️ 关键图片
📊 实验亮点
该论文在Cassie和Digit机器人平台上进行了仿真和硬件实验。实验结果表明,所提出的算法可以有效地实现身体和足端避障,并保证机器人的运动稳定。通过调整步态时序,可以更快地响应障碍物,并避免身体碰撞。通过将非凸安全区域分解为凸多边形,并使用混合整数二次规划,可以有效地选择可行的落脚点。硬件实验也验证了算法在真实环境中的可行性。
🎯 应用场景
该研究成果可应用于各种双足机器人,使其能够在复杂的非结构化环境中安全、高效地执行任务,例如:搜索救援、物流配送、巡检维护等。通过提升机器人的自主避障能力,可以减少人工干预,提高工作效率,并降低安全风险。未来,该技术有望进一步推广到其他类型的移动机器人,例如四足机器人和轮式机器人。
📄 摘要(原文)
Collision-free planning is essential for bipedal robots operating within unstructured environments. This paper presents a real-time Model Predictive Control (MPC) framework that addresses both body and foot avoidance for dynamic bipedal robots. Our contribution is two-fold: we introduce (1) a novel formulation for adjusting step timing to facilitate faster body avoidance and (2) a novel 3D foot-avoidance formulation that implicitly selects swing trajectories and footholds that either steps over or navigate around obstacles with awareness of Center of Mass (COM) dynamics. We achieve body avoidance by applying a half-space relaxation of the safe region but introduce a switching heuristic based on tracking error to detect a need to change foot-timing schedules. To enable foot avoidance and viable landing footholds on all sides of foot-level obstacles, we decompose the non-convex safe region on the ground into several convex polygons and use Mixed-Integer Quadratic Programming to determine the optimal candidate. We found that introducing a soft minimum-travel-distance constraint is effective in preventing the MPC from being trapped in local minima that can stall half-space relaxation methods behind obstacles. We demonstrated the proposed algorithms on multibody simulations on the bipedal robot platforms, Cassie and Digit, as well as hardware experiments on Digit.