Risk-Averse Traversal of Graphs with Stochastic and Correlated Edge Costs for Safe Global Planetary Mobility
作者: Olivier Lamarre, Jonathan Kelly
分类: cs.RO
发布日期: 2025-05-19
备注: Submitted to the Autonomous Robots journal
💡 一句话要点
提出风险规避的图遍历算法,用于随机成本下安全行星移动
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 行星探测 路径规划 风险规避 条件风险价值 AND-OR搜索
📋 核心要点
- 行星表面探索面临不确定环境下的路径规划挑战,现有方法难以有效应对风险。
- 提出基于条件风险价值(CVaR)的风险规避图遍历算法,优化行星移动策略。
- 实验表明,该算法能根据风险规避程度调整决策,并通过信息绕行降低风险。
📝 摘要(中文)
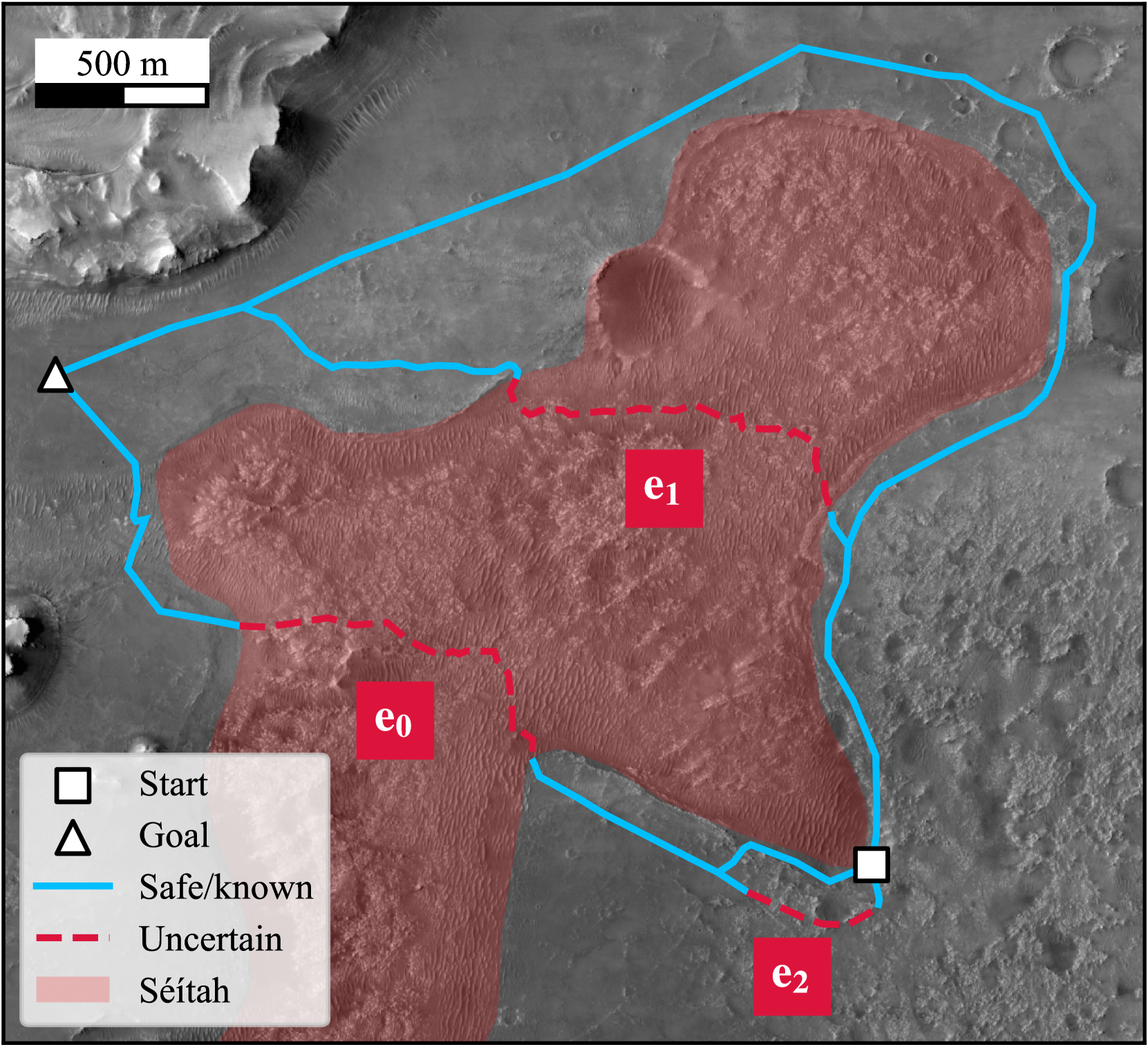
在机器人行星表面探索中,战略移动规划是一项重要任务,它涉及在轨道地图上寻找候选的长距离路线,并识别具有不确定可穿越性的路段。然后,专业的人工操作员根据在这些不确定区域遇到的实际导航困难,制定安全、自适应的遍历计划。本文将这一挑战形式化为加拿大旅行者问题(CTP)的一种新的、风险规避的变体,专门针对全球行星移动。目标是找到一种遍历策略,以最小化条件风险价值(CVaR)准则,这是一种具有直观解释的风险度量。我们提出了一种新的搜索算法,可以找到精确的CVaR最优策略。我们的方法利用了成熟的、针对(风险不可知)期望最小化的最优AND-OR搜索技术,并将这些方法扩展到风险规避领域。我们通过模拟的长距离行星表面遍历来验证我们的方法;我们采用真实的火星表面轨道地图来构建问题实例,并使用地形图来表达不确定区域的遍历概率。我们的结果说明了取决于风险规避程度的不同自适应决策方案。此外,我们的问题设置允许考虑环境相似区域之间的可穿越性相关性。在这种情况下,我们通过实验证明了信息寻求绕行如何降低风险。
🔬 方法详解
问题定义:论文旨在解决行星表面探索中,由于地形不确定性导致传统路径规划方法无法有效规避风险的问题。现有的路径规划方法通常只考虑期望成本最小化,而忽略了极端情况下的高成本风险,这在行星探索等高风险场景下是不可接受的。因此,需要一种能够量化和规避风险的路径规划方法。
核心思路:论文的核心思路是将风险规避的概念引入到路径规划中,通过最小化条件风险价值(CVaR)来寻找最优的遍历策略。CVaR是一种常用的风险度量方法,它关注的是超过某个阈值的损失的期望值,能够有效地控制极端风险。通过优化CVaR,可以找到在最坏情况下也能保证较好性能的路径。
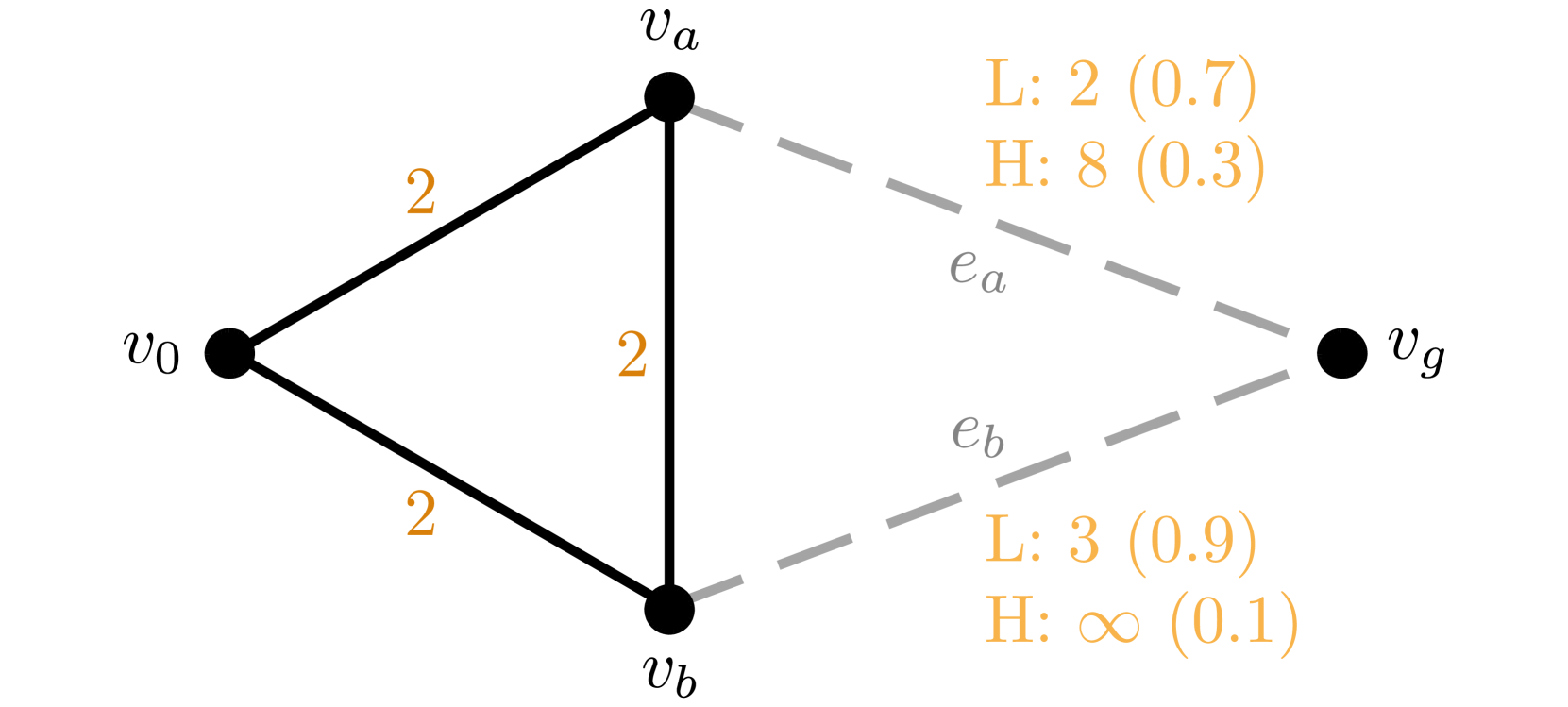
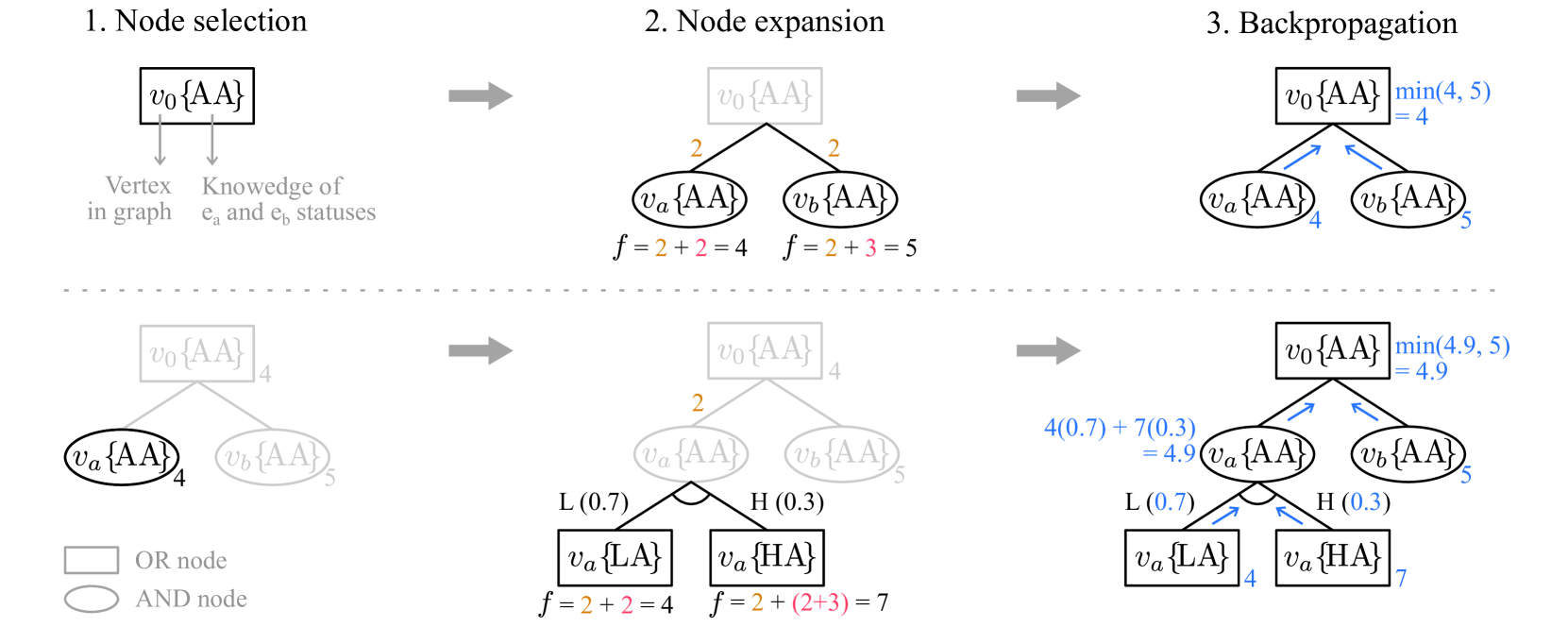
技术框架:该方法基于AND-OR搜索框架,该框架常用于解决不确定性环境下的决策问题。整体流程如下: 1. 问题建模:将行星表面探索问题建模为带随机边权重的图,边权重表示 traversability 的概率分布。 2. CVaR计算:在AND-OR搜索过程中,计算每个节点的CVaR值,作为评估风险的标准。 3. 策略搜索:利用改进的AND-OR搜索算法,寻找最小化CVaR的遍历策略。 4. 自适应决策:根据实际遇到的 traversability 困难,动态调整遍历计划。
关键创新:该论文的关键创新在于将CVaR风险度量引入到行星表面路径规划中,并提出了一种新的搜索算法来寻找CVaR最优策略。与传统的期望成本最小化方法相比,该方法能够更好地应对不确定性环境下的风险,并提供更安全可靠的路径规划方案。此外,该方法还考虑了环境相似区域之间的 traversability 相关性,从而可以通过信息寻求绕行来降低风险。
关键设计:该方法使用条件风险价值(CVaR)作为风险度量,CVaR的计算涉及到置信水平的选择,不同的置信水平代表不同的风险规避程度。算法的关键在于如何有效地在AND-OR搜索框架下计算和优化CVaR值。此外,论文还考虑了 traversability 相关性,这需要对概率分布进行建模和计算。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该算法能够根据风险规避程度选择不同的遍历策略。在高风险规避的情况下,算法倾向于选择更保守的路线,即使这些路线的期望成本略高。此外,实验还验证了信息寻求绕行策略的有效性,通过绕行到已知区域获取更多信息,可以降低整体风险。
🎯 应用场景
该研究成果可应用于行星探测任务中的路径规划,例如火星车或月球车的自主导航。通过考虑地形不确定性带来的风险,该方法可以帮助机器人选择更安全可靠的行驶路线,降低任务失败的风险。此外,该方法还可以应用于其他需要风险规避的路径规划场景,例如自动驾驶、无人机配送等。
📄 摘要(原文)
In robotic planetary surface exploration, strategic mobility planning is an important task that involves finding candidate long-distance routes on orbital maps and identifying segments with uncertain traversability. Then, expert human operators establish safe, adaptive traverse plans based on the actual navigation difficulties encountered in these uncertain areas. In this paper, we formalize this challenge as a new, risk-averse variant of the Canadian Traveller Problem (CTP) tailored to global planetary mobility. The objective is to find a traverse policy minimizing a conditional value-at-risk (CVaR) criterion, which is a risk measure with an intuitive interpretation. We propose a novel search algorithm that finds exact CVaR-optimal policies. Our approach leverages well-established optimal AND-OR search techniques intended for (risk-agnostic) expectation minimization and extends these methods to the risk-averse domain. We validate our approach through simulated long-distance planetary surface traverses; we employ real orbital maps of the Martian surface to construct problem instances and use terrain maps to express traversal probabilities in uncertain regions. Our results illustrate different adaptive decision-making schemes depending on the level of risk aversion. Additionally, our problem setup allows accounting for traversability correlations between similar areas of the environment. In such a case, we empirically demonstrate how information-seeking detours can mitigate risk.