Hybrid Voting-Based Task Assignment in Modular Construction Scenarios
作者: Daniel Weiner, Raj Korpan
分类: cs.RO
发布日期: 2025-05-19
备注: Accepted to Block by Block workshop at ICRA 2025
💡 一句话要点
提出HVBTA框架,解决模块化建造中多智能体任务分配与冲突避免问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 模块化建造 多智能体系统 任务分配 冲突避免 大型语言模型 投票机制 机器人路径规划
📋 核心要点
- 现有方法在模块化建造中,难以有效协调异构多智能体系统,导致任务分配效率低下和潜在的冲突。
- HVBTA框架融合投票机制和大型语言模型,评估智能体能力与任务需求的匹配度,实现高效任务分配。
- HVBTA集成了基于冲突的搜索算法,确保机器人团队在组装过程中的无碰撞路径规划和安全协调。
📝 摘要(中文)
模块化建造涉及异地预制和现场组装,具有显著优势,但也给机器人自动化带来了复杂的协调挑战。有效的任务分配对于利用多智能体系统(MAS)至关重要。本文介绍了一种混合投票任务分配(HVBTA)框架,这是一种优化异构多智能体建造团队协作的新方法。HVBTA受到人类任务委派推理的启发,独特地将多种投票机制与大型语言模型(LLM)的能力相结合,从而对智能体能力和任务需求之间的细微匹配进行评估。该框架通过为智能体分配能力剖面,为建造任务分配详细的需求列表(称为任务描述)来运行,从而生成一个定量的匹配度矩阵。六种不同的投票方法,通过预训练的LLM进行增强,分析该矩阵以稳健地识别每个任务的最佳智能体。集成了基于冲突的搜索(CBS)用于分散的、无碰撞的路径规划,确保了机器人团队在组装操作期间高效且安全的时空协调。HVBTA实现了高效、无冲突的分配和协调,从而可能加快和提高模块化组装的准确性。目前的工作正在评估HVBTA在各种模拟建造场景中的性能,这些场景涉及不同的机器人平台和任务复杂性。虽然HVBTA被设计为一个通用的框架,适用于任何具有明确定义任务和能力的领域,但由于涉及预定的建造计划,它将特别有效地解决模块化建造中多智能体协作机器人的苛刻协调要求。
🔬 方法详解
问题定义:论文旨在解决模块化建造场景下,如何高效、安全地分配任务给异构多智能体系统,并避免智能体之间的路径冲突。现有方法在处理复杂任务需求和智能体能力差异时,难以实现最优的任务分配,并且缺乏有效的冲突避免机制。
核心思路:论文的核心思路是模拟人类在任务委派时的推理过程,通过综合考虑智能体的能力和任务的需求,利用多种投票机制和大型语言模型进行匹配度评估,从而实现更合理、更高效的任务分配。同时,结合冲突避免算法,确保智能体在执行任务过程中的安全性和效率。
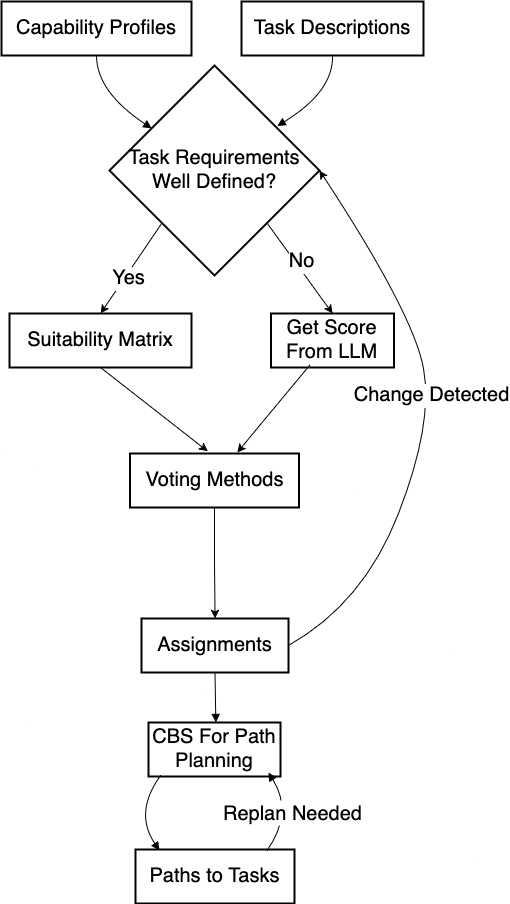
技术框架:HVBTA框架主要包含以下几个模块:1) 能力剖面与任务描述:为每个智能体定义能力剖面,详细描述其具备的技能和资源;为每个任务创建任务描述,明确任务的需求和约束。2) 匹配度矩阵生成:基于能力剖面和任务描述,生成一个量化的匹配度矩阵,表示每个智能体执行每个任务的潜在适合程度。3) 混合投票机制:采用多种投票方法(例如,简单多数投票、加权投票等),并结合大型语言模型对匹配度矩阵进行分析,选出最适合执行任务的智能体。4) 冲突避免路径规划:使用基于冲突的搜索(CBS)算法,为每个智能体规划无碰撞路径,确保在执行任务过程中避免冲突。
关键创新:HVBTA的关键创新在于将多种投票机制与大型语言模型相结合,用于评估智能体能力和任务需求的匹配度。这种混合方法能够更全面、更准确地评估智能体的适用性,从而实现更优的任务分配。此外,集成CBS算法实现了分散式的冲突避免,提高了系统的鲁棒性和可扩展性。
关键设计:论文中涉及的关键设计包括:1) 投票机制的选择:根据具体的应用场景和任务特点,选择合适的投票方法,并调整其权重。2) LLM的集成方式:利用LLM对匹配度矩阵进行语义分析,提取更深层次的关联信息,提高匹配的准确性。3) CBS算法的参数设置:根据智能体的运动特性和环境约束,调整CBS算法的参数,以实现更高效的路径规划。
🖼️ 关键图片
📊 实验亮点
论文通过模拟实验验证了HVBTA框架的有效性。实验结果表明,HVBTA能够显著提高任务分配的效率和准确性,并有效避免智能体之间的路径冲突。具体的性能数据(例如,任务完成时间、冲突发生率等)将在后续工作中给出。与传统的任务分配方法相比,HVBTA在复杂场景下表现出更强的鲁棒性和适应性。
🎯 应用场景
该研究成果可广泛应用于模块化建造、自动化仓库、智能物流等领域,尤其适用于需要多智能体协同完成复杂任务的场景。通过优化任务分配和避免冲突,可以显著提高生产效率、降低成本,并提升系统的安全性和可靠性。未来,该框架有望进一步扩展到其他领域,例如灾害救援、医疗服务等。
📄 摘要(原文)
Modular construction, involving off-site prefabrication and on-site assembly, offers significant advantages but presents complex coordination challenges for robotic automation. Effective task allocation is critical for leveraging multi-agent systems (MAS) in these structured environments. This paper introduces the Hybrid Voting-Based Task Assignment (HVBTA) framework, a novel approach to optimizing collaboration between heterogeneous multi-agent construction teams. Inspired by human reasoning in task delegation, HVBTA uniquely integrates multiple voting mechanisms with the capabilities of a Large Language Model (LLM) for nuanced suitability assessment between agent capabilities and task requirements. The framework operates by assigning Capability Profiles to agents and detailed requirement lists called Task Descriptions to construction tasks, subsequently generating a quantitative Suitability Matrix. Six distinct voting methods, augmented by a pre-trained LLM, analyze this matrix to robustly identify the optimal agent for each task. Conflict-Based Search (CBS) is integrated for decentralized, collision-free path planning, ensuring efficient and safe spatio-temporal coordination of the robotic team during assembly operations. HVBTA enables efficient, conflict-free assignment and coordination, facilitating potentially faster and more accurate modular assembly. Current work is evaluating HVBTA's performance across various simulated construction scenarios involving diverse robotic platforms and task complexities. While designed as a generalizable framework for any domain with clearly definable tasks and capabilities, HVBTA will be particularly effective for addressing the demanding coordination requirements of multi-agent collaborative robotics in modular construction due to the predetermined construction planning involved.