Granular Loco-Manipulation: Repositioning Rocks Through Strategic Sand Avalanche
作者: Haodi Hu, Yue Wu, Feifei Qian, Daniel Seita
分类: cs.RO
发布日期: 2025-05-19
💡 一句话要点
DiffusiveGRAIN:通过策略性沙土崩塌实现移动机器人对岩石的精细操控
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 运动规划 扩散模型 环境预测 多足机器人 颗粒流 复杂地形 loco-manipulation
📋 核心要点
- 现有方法难以有效重定位障碍物,阻碍了腿式机器人在沙坡等复杂地形上的攀爬能力。
- DiffusiveGRAIN通过学习预测沙土崩塌对障碍物运动的影响,并结合机器人状态预测,实现运动过程中的障碍物操纵。
- 实验表明,该方法能有效预测多障碍物在颗粒流中的相互作用,并成功引导机器人在复杂地形上移动岩石。
📝 摘要(中文)
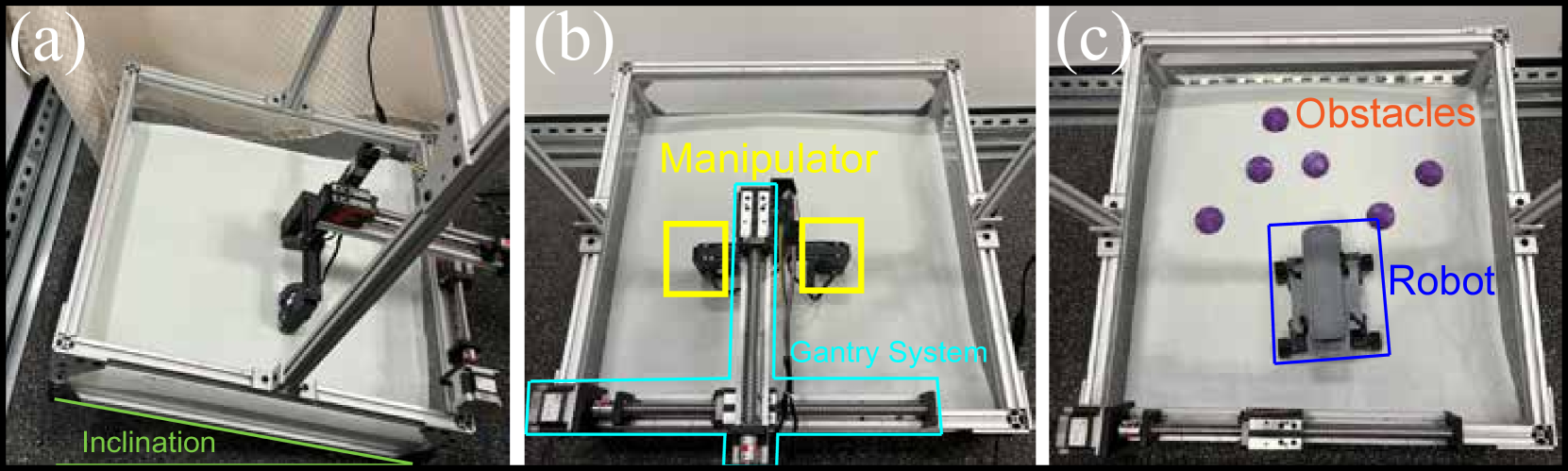
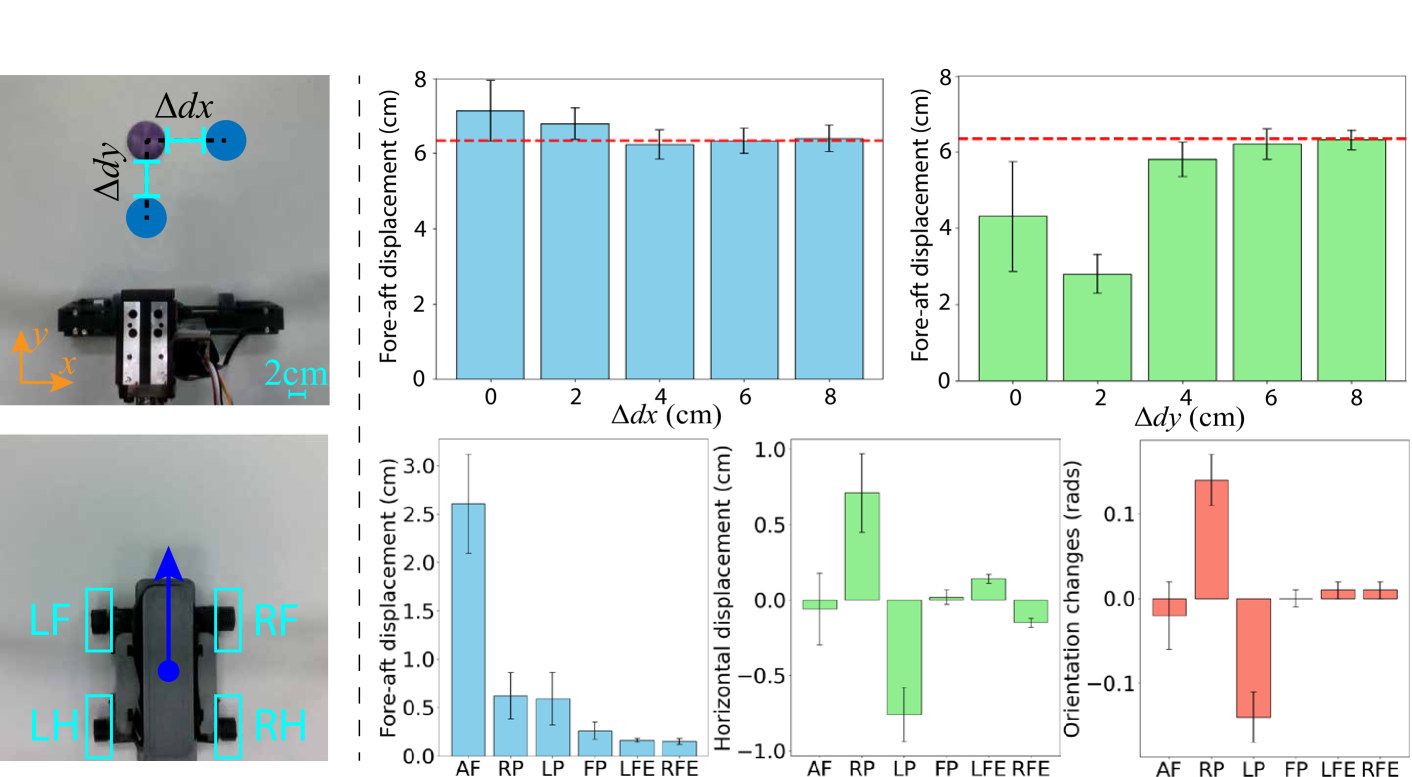
本文提出了一种基于学习的方法DiffusiveGRAIN,使多足机器人能够在运动过程中策略性地诱导局部沙土崩塌,从而间接操纵障碍物。研究进行了375次试验,系统地改变了障碍物间距、机器人方向和腿部动作,并在其中75次试验中进行了详细分析。结果表明,紧密排列的障碍物的运动表现出显著的相互干扰,需要联合建模。此外,不同的多腿挖掘动作可能导致不同的机器人状态变化,因此需要对操纵和运动进行综合规划。为了解决这些挑战,DiffusiveGRAIN包含一个基于扩散的环境预测器,用于捕获颗粒流干扰下的多障碍物运动,以及一个机器人状态预测器,用于估计多腿动作模式引起的机器人状态变化。部署实验(90次试验)表明,通过整合环境和机器人状态预测器,机器人可以自主地根据loco-manipulation目标规划其运动,并在超过65%的试验中成功地将紧密排列的岩石移动到所需位置。这项研究展示了运动机器人通过策略性地操纵障碍物来实现提高在复杂地形上的移动性的潜力。
🔬 方法详解
问题定义:现有方法在复杂地形下,难以精确控制机器人通过操纵障碍物来辅助运动。特别是当障碍物间距较近时,相互干扰显著,传统的独立建模方法失效。此外,不同的腿部动作会对机器人自身状态产生影响,需要综合考虑操纵和运动的规划。
核心思路:DiffusiveGRAIN的核心在于学习环境和机器人状态的动态变化,从而实现对障碍物运动的精确预测和对机器人运动的有效控制。通过预测沙土崩塌对障碍物的影响,机器人可以策略性地诱导沙土流动,从而间接操纵障碍物。
技术框架:DiffusiveGRAIN包含两个主要模块:1) 基于扩散的环境预测器,用于预测多障碍物在颗粒流干扰下的运动;2) 机器人状态预测器,用于估计多腿动作模式引起的机器人状态变化。整体流程是,根据loco-manipulation目标,利用这两个预测器进行运动规划,控制机器人执行动作,最终实现障碍物的重定位。
关键创新:DiffusiveGRAIN的关键创新在于将扩散模型应用于预测颗粒流中多障碍物的相互作用,并将其与机器人状态预测相结合,实现了运动和操纵的联合规划。与传统方法相比,DiffusiveGRAIN能够更准确地预测复杂环境下的障碍物运动,并更好地控制机器人的运动状态。
关键设计:环境预测器使用扩散模型来模拟颗粒流对障碍物运动的影响,通过学习障碍物之间的相互作用,提高预测精度。机器人状态预测器则通过学习多腿动作模式与机器人状态变化之间的关系,实现对机器人运动的精确控制。具体的损失函数和网络结构等细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
实验结果表明,DiffusiveGRAIN能够成功地将紧密排列的岩石移动到所需位置,成功率超过65%。该方法能够有效预测多障碍物在颗粒流中的相互作用,并实现运动和操纵的联合规划。与没有进行联合建模的方法相比,DiffusiveGRAIN在障碍物重定位任务中表现出显著的优势(具体数据未知)。
🎯 应用场景
该研究成果可应用于搜救机器人、地形勘探机器人等领域,使机器人能够在复杂、非结构化的环境中自主移动和操作。例如,在地震灾害现场,机器人可以利用该技术清理障碍物,开辟救援通道。此外,该技术还可以应用于农业机器人,帮助机器人进行土壤改良和作物管理。
📄 摘要(原文)
Legged robots have the potential to leverage obstacles to climb steep sand slopes. However, efficiently repositioning these obstacles to desired locations is challenging. Here we present DiffusiveGRAIN, a learning-based method that enables a multi-legged robot to strategically induce localized sand avalanches during locomotion and indirectly manipulate obstacles. We conducted 375 trials, systematically varying obstacle spacing, robot orientation, and leg actions in 75 of them. Results show that the movement of closely-spaced obstacles exhibits significant interference, requiring joint modeling. In addition, different multi-leg excavation actions could cause distinct robot state changes, necessitating integrated planning of manipulation and locomotion. To address these challenges, DiffusiveGRAIN includes a diffusion-based environment predictor to capture multi-obstacle movements under granular flow interferences and a robot state predictor to estimate changes in robot state from multi-leg action patterns. Deployment experiments (90 trials) demonstrate that by integrating the environment and robot state predictors, the robot can autonomously plan its movements based on loco-manipulation goals, successfully shifting closely located rocks to desired locations in over 65% of trials. Our study showcases the potential for a locomoting robot to strategically manipulate obstacles to achieve improved mobility on challenging terrains.