Dribble Master: Learning Agile Humanoid Dribbling Through Legged Locomotion
作者: Zhuoheng Wang, Jinyin Zhou, Qi Wu
分类: cs.RO
发布日期: 2025-05-19 (更新: 2025-12-07)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于强化学习的两阶段课程学习框架,实现敏捷人形机器人足球运球
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人 足球运球 强化学习 课程学习 运动控制 机器人视觉 仿真到真实
📋 核心要点
- 现有基于规则的机器人运球方法依赖固定模式,难以适应实时球体动态,导致控球精度不足。
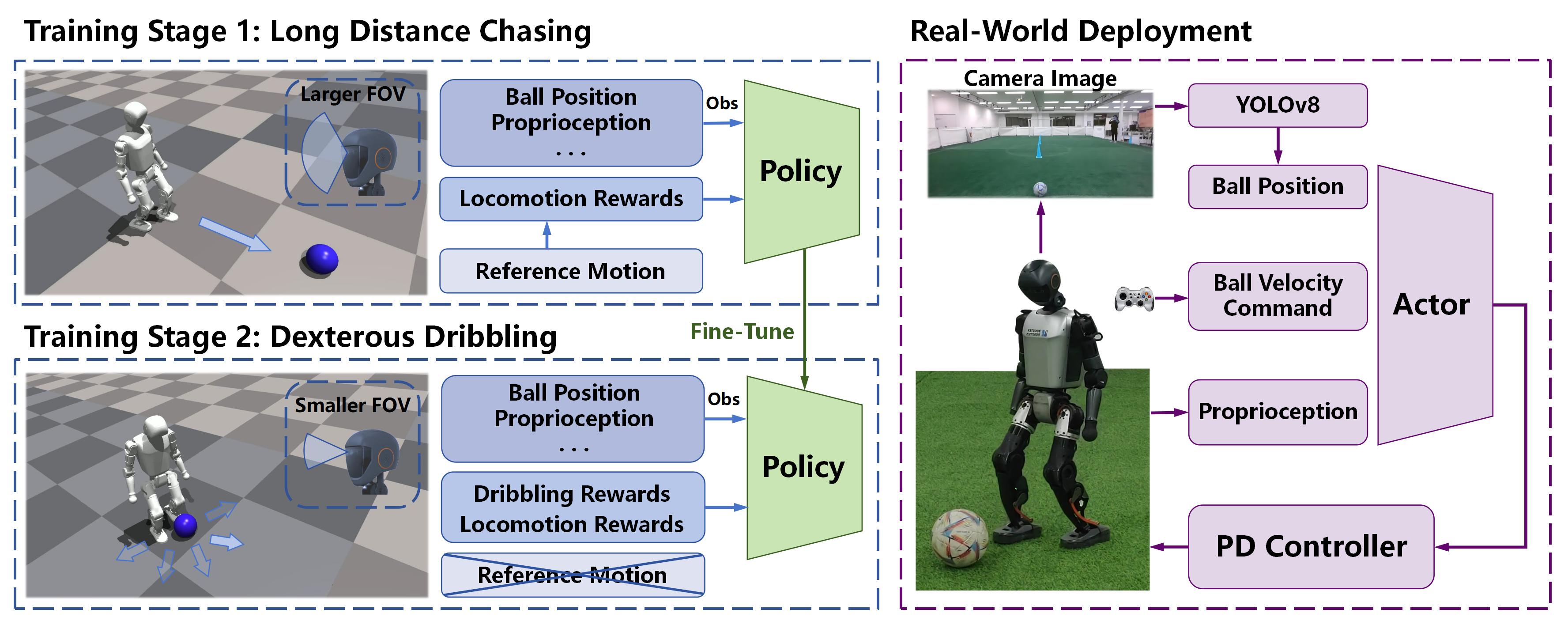
- 论文提出两阶段课程学习框架,先学习基本运动技能,再微调策略实现敏捷运球,无需预定义轨迹。
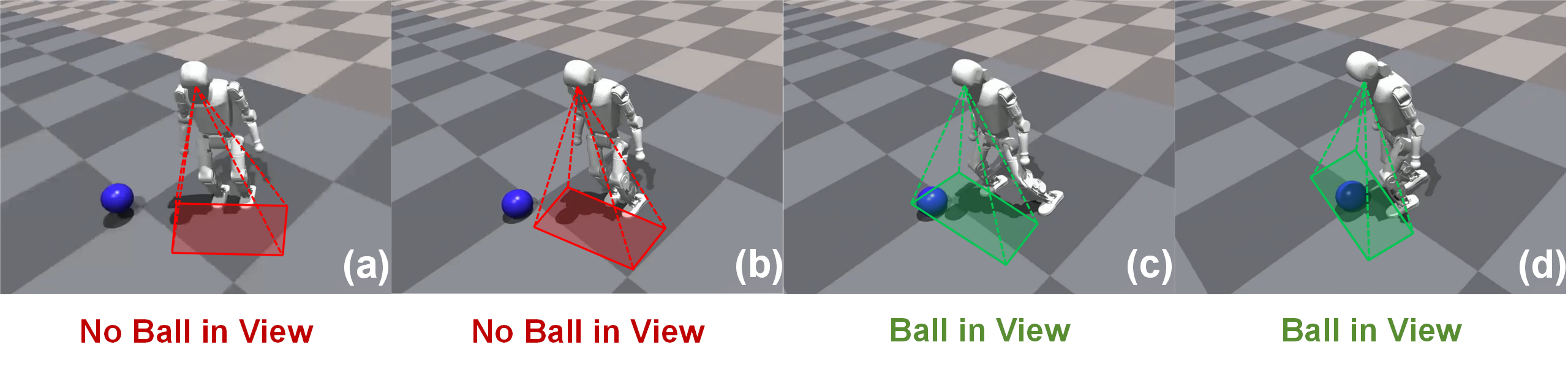
- 通过虚拟相机模拟真实视野约束,并设计启发式奖励鼓励主动感知,提升了机器人运球的灵活性和视觉效果。
📝 摘要(中文)
人形机器人足球运球是一项极具挑战性的任务,它需要在保持动态平衡的同时灵巧地控制球。传统的基于规则的方法由于依赖固定的行走模式和对实时球体动态的适应性有限,通常难以实现精确的控球。为了应对这些挑战,我们提出了一个两阶段课程学习框架,使人形机器人能够在没有明确动力学或预定义轨迹的情况下获得运球技能。在第一阶段,机器人学习基本的运动技能;在第二阶段,我们对策略进行微调,以实现敏捷的运球动作。我们还在模拟中引入了一个虚拟相机模型,该模型模拟了真实机器人的视野和感知约束,从而在训练期间实现真实的球体感知。我们还设计了启发式奖励,以鼓励主动感知,从而扩大了连续球体感知的视觉范围。该策略在模拟中进行训练,并成功转移到物理人形机器人上。实验结果表明,我们的方法能够有效地控制球,从而在多个环境中实现灵活且具有视觉吸引力的运球行为。这项工作突出了强化学习在开发敏捷人形足球机器人方面的潜力。
🔬 方法详解
问题定义:人形机器人足球运球需要在动态平衡下灵巧控球,现有方法依赖固定步态,对球的实时动态适应性差,难以实现精准控制。痛点在于缺乏对复杂环境和球体运动的自适应能力。
核心思路:采用强化学习,让机器人通过与环境交互自主学习运球策略,避免了人工设计复杂规则的困难。通过课程学习,先易后难,逐步提升机器人的运动和控球能力。
技术框架:整体框架分为两个阶段:第一阶段是运动技能学习,训练机器人掌握基本的行走和平衡能力;第二阶段是敏捷运球学习,在第一阶段的基础上,微调策略,使机器人能够控制球并进行灵活的运球动作。训练过程中使用虚拟相机模拟真实机器人的视觉感知,并设计奖励函数引导机器人学习。
关键创新:主要创新在于两阶段课程学习框架和虚拟相机模型的引入。课程学习使得训练过程更加稳定和高效,虚拟相机模型则提高了策略从仿真到真实的迁移能力。与传统方法相比,该方法无需人工设计复杂的运动轨迹,而是通过强化学习自主探索最优策略。
关键设计:虚拟相机模型模拟了真实机器人的视野范围和分辨率,并添加了噪声来模拟真实环境中的感知误差。启发式奖励函数包括鼓励机器人靠近球、控制球的方向和速度、以及保持平衡等多个方面。具体参数设置和网络结构等细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法训练的机器人在多个环境中实现了灵活且具有视觉吸引力的运球行为。该方法成功地将模拟训练的策略迁移到真实的物理人形机器人上,验证了该方法的有效性和可行性。具体性能数据和对比基线在论文中进行了详细描述(未知)。
🎯 应用场景
该研究成果可应用于人形机器人足球比赛、复杂环境下的机器人运动控制、以及其他需要精细操作和动态平衡的机器人任务。通过强化学习和课程学习,可以开发出更加智能和灵活的机器人系统,提升机器人在实际应用中的适应性和鲁棒性。未来,该技术有望应用于搜索救援、医疗辅助等领域。
📄 摘要(原文)
Humanoid soccer dribbling is a highly challenging task that demands dexterous ball manipulation while maintaining dynamic balance. Traditional rule-based methods often struggle to achieve accurate ball control due to their reliance on fixed walking patterns and limited adaptability to real-time ball dynamics. To address these challenges, we propose a two-stage curriculum learning framework that enables a humanoid robot to acquire dribbling skills without explicit dynamics or predefined trajectories. In the first stage, the robot learns basic locomotion skills; in the second stage, we fine-tune the policy for agile dribbling maneuvers. We further introduce a virtual camera model in simulation that simulates the field of view and perception constraints of the real robot, enabling realistic ball perception during training. We also design heuristic rewards to encourage active sensing, promoting a broader visual range for continuous ball perception. The policy is trained in simulation and successfully transferred to a physical humanoid robot. Experiment results demonstrate that our method enables effective ball manipulation, achieving flexible and visually appealing dribbling behaviors across multiple environments. This work highlights the potential of reinforcement learning in developing agile humanoid soccer robots. Additional details and videos are available at https://zhuoheng0910.github.io/dribble-master/.