The Robot of Theseus: A modular robotic testbed for legged locomotion
作者: Karthik Urs, Jessica Carlson, Aditya Srinivas Manohar, Michael Rakowiecki, Abdulhadi Alkayyali, John E. Saunders, Faris Tulbah, Talia Y. Moore
分类: cs.RO
发布日期: 2025-05-19
💡 一句话要点
提出模块化四足机器人TROT,用于生物力学研究和步态控制策略开发
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 模块化设计 生物力学 步态控制 开源硬件 机器人平台 运动形态
📋 核心要点
- 现有四足机器人与动物形态差异大,生物力学相关性低,且商业机器人成本高昂,难以定制。
- TROT采用模块化腿部设计,成本低廉,可匹配多种动物形态,用于生物力学假设验证。
- TROT开源软硬件,支持用户自定义步态和形态,并展示了其在不同形态运动比较中的应用。
📝 摘要(中文)
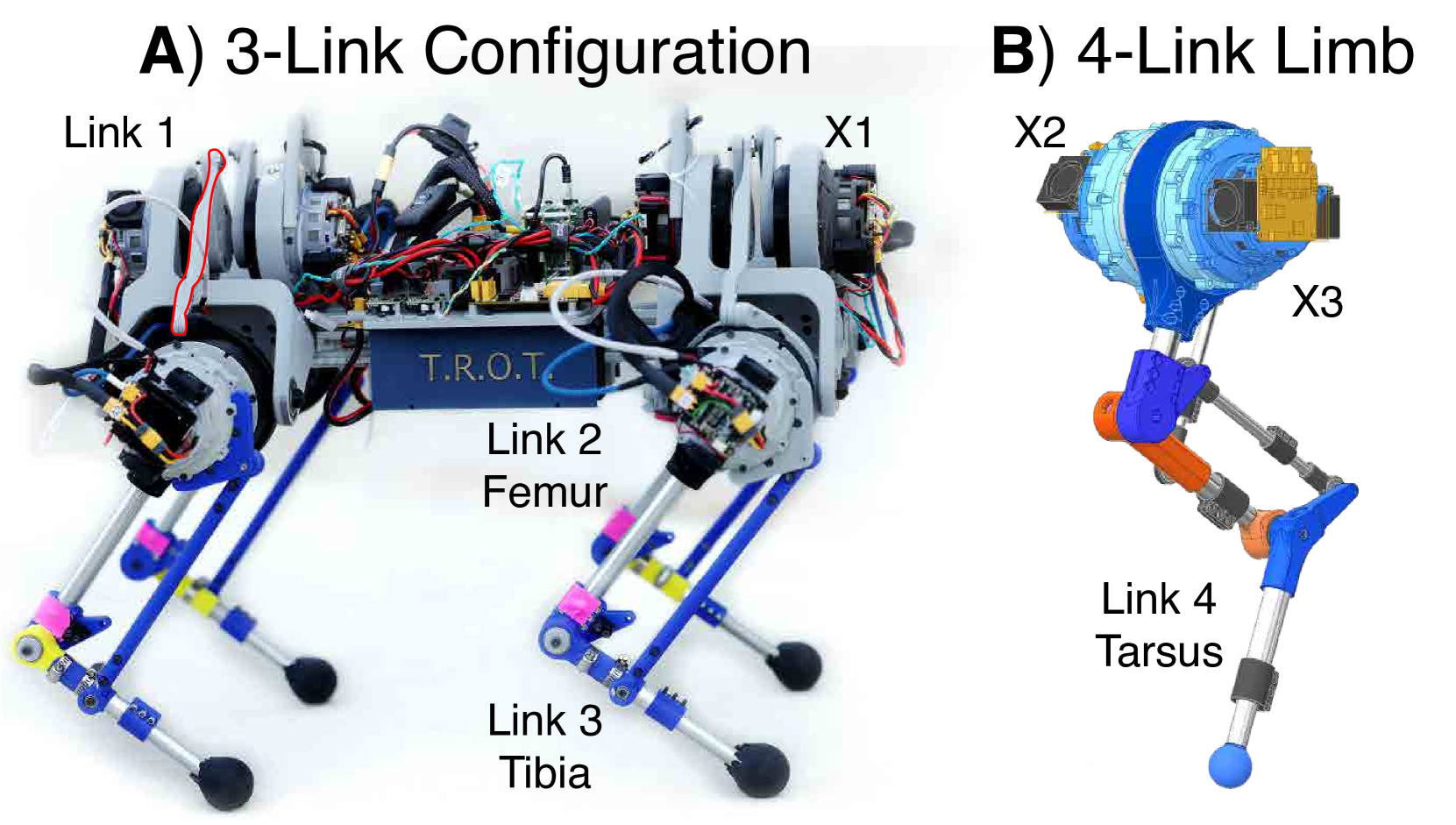
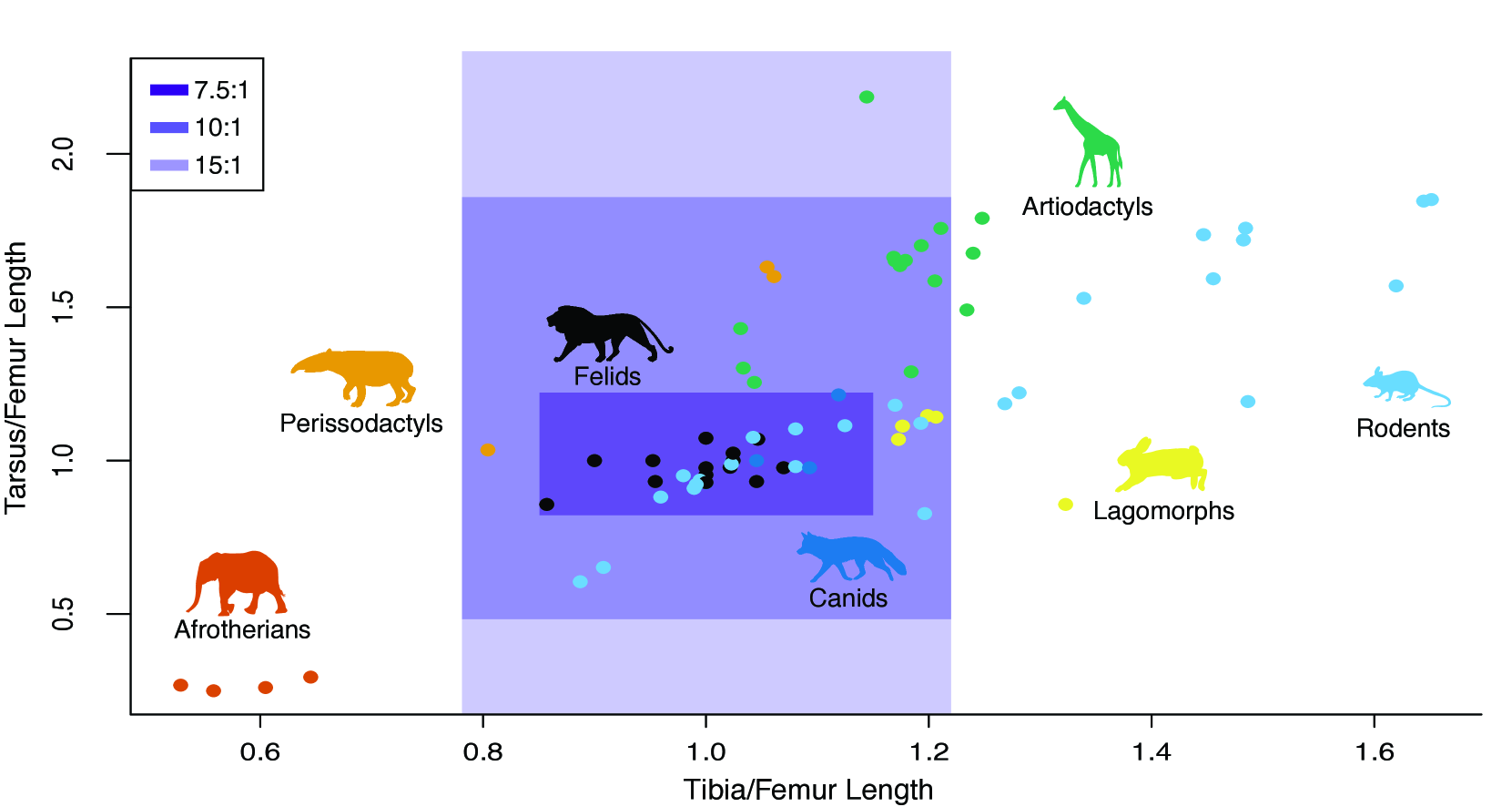
本文介绍了一种低成本的模块化四足机器人平台——忒修斯之机器人(TROT),旨在用于生物力学假设检验。TROT的建造成本约为4000美元,采用3D打印部件和标准现成组件。每个肢体由2或3个刚性连杆组成;近端关节可以旋转以模拟膝盖或肘部。伸缩机构可以改变每个肢体连杆的长度。开源软件支持用户自定义步态和形态变化。有效腿长(或蹲伏姿势)由驱动每个关节的四杆联动机构决定。可反向驱动的电机可以改变虚拟弹簧刚度和运动范围。TROT硬件和软件的完整描述可在网上免费获取。我们展示了使用TROT比较现存、已灭绝和理论形态的运动。除了生物力学假设检验,我们还设想了该低成本、模块化、腿式机器人平台的多种不同应用,包括开发新的控制策略、清除地雷或远程勘探。所有CAD和代码都可以在TROT项目页面上下载。
🔬 方法详解
问题定义:现有四足机器人要么在生物力学研究中缺乏相关性,要么成本过高且难以定制,限制了其在生物学研究中的应用。因此,需要一种低成本、可定制且形态可变的四足机器人平台,以促进生物力学假设的验证和步态控制策略的开发。
核心思路:TROT的核心思路是采用模块化设计,允许用户通过更换和调整腿部组件来模拟不同的动物形态。通过使用3D打印部件和现成组件,降低了机器人的建造成本。同时,开源软硬件的设计使得用户可以自定义步态和形态,从而灵活地进行实验。
技术框架:TROT的整体架构包括:1)模块化腿部设计,每个腿部由2或3个刚性连杆组成,近端关节可配置为膝盖或肘部;2)伸缩机构,用于改变连杆长度;3)四杆联动机构,用于控制有效腿长;4)可反向驱动电机,用于调节虚拟弹簧刚度和运动范围;5)开源软件,支持用户自定义步态和形态。
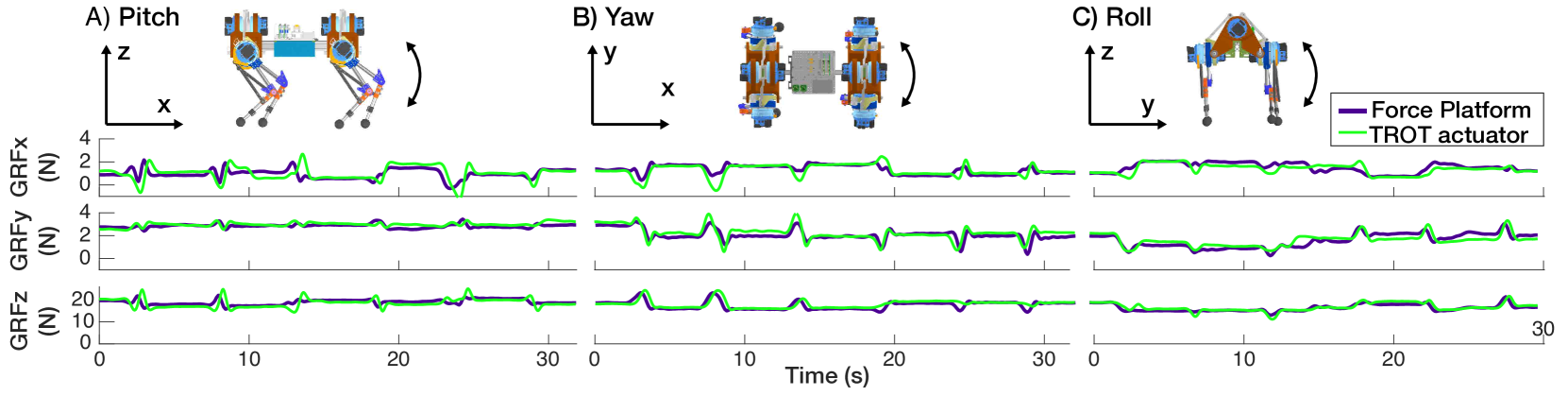
关键创新:TROT的关键创新在于其模块化和可定制性。通过模块化设计,用户可以快速更换和调整腿部组件,以模拟不同的动物形态。可反向驱动电机允许用户调整虚拟弹簧刚度,从而模拟不同的肌肉特性。开源软硬件的设计使得用户可以方便地进行步态控制策略的开发和实验。
关键设计:TROT的关键设计包括:1)腿部连杆的长度和角度可调,以匹配不同的动物形态;2)四杆联动机构的参数设计,以实现所需的有效腿长和运动范围;3)电机控制算法的设计,以实现所需的虚拟弹簧刚度和阻尼特性;4)开源软件的架构设计,以方便用户自定义步态和形态。
🖼️ 关键图片
📊 实验亮点
论文展示了TROT在比较现存、已灭绝和理论形态的运动方面的应用。通过调整TROT的腿部形态和步态参数,研究人员可以模拟不同动物的运动方式,并分析其生物力学特性。虽然论文中没有给出具体的性能数据,但展示了TROT在生物力学研究中的潜力。
🎯 应用场景
TROT的应用场景广泛,包括生物力学研究,例如验证不同动物形态的运动性能;步态控制策略开发,例如研究不同步态对能量效率的影响;以及在危险环境中的应用,例如清除地雷和远程勘探。此外,TROT还可以作为教育平台,用于教授机器人学和生物力学相关知识。
📄 摘要(原文)
Robotic models are useful for independently varying specific features, but most quadrupedal robots differ so greatly from animal morphologies that they have minimal biomechanical relevance. Commercially available quadrupedal robots are also prohibitively expensive for biological research programs and difficult to customize. Here, we present a low-cost quadrupedal robot with modular legs that can match a wide range of animal morphologies for biomechanical hypothesis testing. The Robot Of Theseus (TROT) costs approximately $4000 to build out of 3D printed parts and standard off-the-shelf supplies. Each limb consists of 2 or 3 rigid links; the proximal joint can be rotated to become a knee or elbow. Telescoping mechanisms vary the length of each limb link. The open-source software accommodates user-defined gaits and morphology changes. Effective leg length, or crouch, is determined by the four-bar linkage actuating each joint. The backdrivable motors can vary virtual spring stiffness and range of motion. Full descriptions of the TROT hardware and software are freely available online. We demonstrate the use of TROT to compare locomotion among extant, extinct, and theoretical morphologies. In addition to biomechanical hypothesis testing, we envision a variety of different applications for this low-cost, modular, legged robotic platform, including developing novel control strategies, clearing land mines, or remote exploration. All CAD and code is available for download on the TROT project page.