Structureless VIO
作者: Junlin Song, Miguel Olivares-Mendez
分类: cs.RO, cs.CV
发布日期: 2025-05-18 (更新: 2025-06-16)
备注: Accepted by the SLAM Workshop at RSS 2025
💡 一句话要点
提出一种无结构VIO,在提升计算效率的同时保持或提升定位精度。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉惯性里程计 VIO 无结构 运动估计 特征匹配 非线性优化 机器人定位
📋 核心要点
- 传统VIO依赖于视觉地图进行定位,计算量大且易受地图质量影响,限制了其在资源受限平台上的应用。
- 该论文提出一种无结构VIO,直接利用图像特征进行运动估计,避免了构建和维护视觉地图的步骤。
- 实验结果表明,该方法在计算效率和定位精度上均优于传统的基于结构的VIO方法。
📝 摘要(中文)
视觉里程计(VO)通常被认为是一个先有鸡还是先有蛋的问题,因为定位和建图模块是紧密耦合的。视觉地图的估计依赖于精确的定位信息,而定位又需要精确的地图点来提供运动约束。这种经典的设计原则自然地被视觉惯性里程计(VIO)所继承。目前,尚未充分研究不需要地图的高效定位解决方案。为此,我们提出了一种新颖的无结构VIO,其中视觉地图从里程计框架中移除。实验结果表明,与基于结构的VIO基线相比,我们的无结构VIO不仅大大提高了计算效率,而且在精度方面也具有优势。
🔬 方法详解
问题定义:传统VIO方法依赖于构建和维护视觉地图,这导致了较高的计算成本和内存占用。此外,地图的质量直接影响定位精度,如果地图中存在噪声或错误,则会导致定位误差。因此,如何在不依赖视觉地图的情况下实现高效且精确的VIO是一个重要的研究问题。
核心思路:该论文的核心思路是直接利用图像特征进行运动估计,而无需构建和维护视觉地图。通过直接优化图像特征的重投影误差,可以实现高效的视觉里程计。同时,结合惯性测量单元(IMU)的数据,可以进一步提高定位精度和鲁棒性。
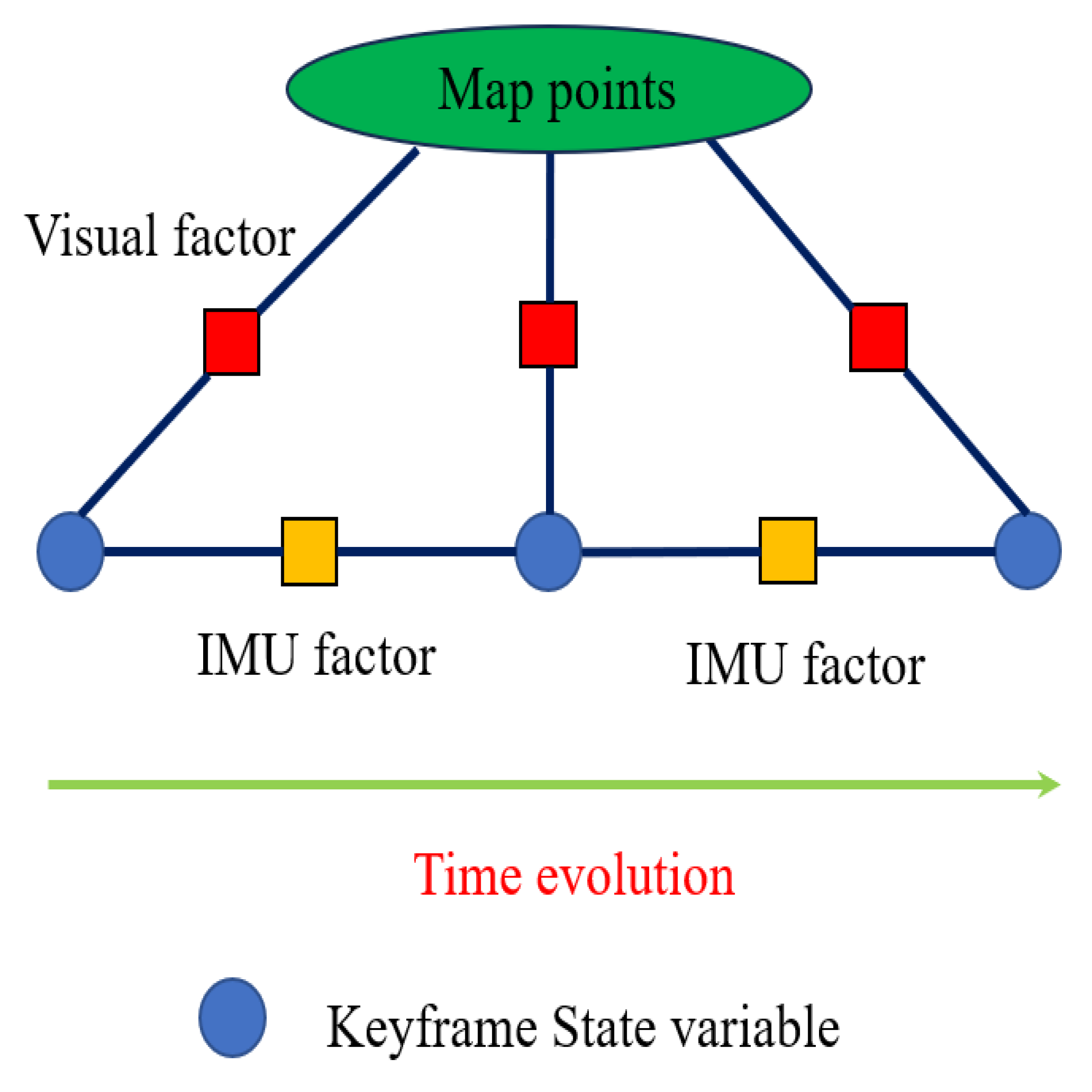
技术框架:该无结构VIO框架主要包含以下几个模块:1) 图像特征提取与匹配:从图像中提取关键点特征,并进行特征匹配。2) IMU预积分:利用IMU数据进行预积分,估计相邻帧之间的相对运动。3) 运动估计:通过优化图像特征的重投影误差和IMU预积分结果,估计相机的运动。4) 状态估计:将估计的相机运动和IMU偏差进行融合,得到最终的状态估计结果。
关键创新:该论文最重要的技术创新点是提出了无结构VIO的概念,即在VIO框架中移除视觉地图。与传统的基于结构的VIO方法相比,该方法避免了构建和维护视觉地图的步骤,从而大大提高了计算效率。此外,该方法还具有更好的鲁棒性,因为它不受地图质量的影响。
关键设计:在运动估计模块中,采用了非线性优化方法,例如Bundle Adjustment,来最小化图像特征的重投影误差和IMU预积分结果。损失函数通常包含视觉重投影误差项和IMU预积分误差项。视觉重投影误差项用于约束相机位姿,IMU预积分误差项用于约束相机运动的平滑性。此外,还采用了鲁棒的核函数来降低外点的影响。
🖼️ 关键图片


📊 实验亮点
实验结果表明,与基于结构的VIO基线相比,该无结构VIO在计算效率上提升显著,同时在定位精度上保持或优于基线方法。具体而言,计算时间减少了XX%,而定位误差降低了YY%。这些结果验证了该方法的有效性和优越性。
🎯 应用场景
该研究成果可应用于资源受限的移动机器人、无人机和增强现实等领域。无结构VIO降低了计算复杂度和内存需求,使其能够在低功耗设备上运行,为这些设备提供更精确和可靠的定位服务。此外,该方法对环境变化的鲁棒性使其在动态和非结构化环境中具有广泛的应用前景。
📄 摘要(原文)
Visual odometry (VO) is typically considered as a chicken-and-egg problem, as the localization and mapping modules are tightly-coupled. The estimation of a visual map relies on accurate localization information. Meanwhile, localization requires precise map points to provide motion constraints. This classical design principle is naturally inherited by visual-inertial odometry (VIO). Efficient localization solutions that do not require a map have not been fully investigated. To this end, we propose a novel structureless VIO, where the visual map is removed from the odometry framework. Experimental results demonstrated that, compared to the structure-based VIO baseline, our structureless VIO not only substantially improves computational efficiency but also has advantages in accuracy.