Online Synthesis of Control Barrier Functions with Local Occupancy Grid Maps for Safe Navigation in Unknown Environments
作者: Yuepeng Zhang, Yu Chen, Yuda Li, Shaoyuan Li, Xiang Yin
分类: cs.RO
发布日期: 2025-05-17
💡 一句话要点
提出基于局部栅格地图的在线控制屏障函数综合方法,保障未知环境下的安全导航。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 控制屏障函数 安全导航 栅格地图 未知环境 实时控制
📋 核心要点
- 现有控制屏障函数方法主要针对已知环境,难以应对未知环境下的实时安全保障需求。
- 该论文提出一种新颖方法,利用稳态热场与控制屏障函数平滑性之间的联系,直接从局部栅格地图在线合成CBF。
- 实验结果表明,该方法能够在200*200的栅格地图上以毫秒级的速度合成CBF,具有良好的实时性。
📝 摘要(中文)
控制屏障函数(CBFs)已成为一种有效的安全过滤器,能够以形式化保证确保自主系统在动态环境中的安全性。然而,现有CBF综合方法大多集中于完全已知的环境。在未知环境中,基于感知数据在线综合CBF面临特殊挑战,尤其需要从高维数据中高效实时地构建CBF。本文提出了一种直接从局部栅格地图(OGMs)在线综合CBF的新方法。受稳态热场的启发,我们证明了CBF的平滑性要求对应于具有适当边界条件的稳态热传导方程的解。通过利用拉普拉斯方程中系数矩阵的稀疏性,我们的方法可以有效地计算地图中每个网格单元的安全值。仿真和真实实验证明了该方法的有效性。结果表明,我们的CBF平均可以在200*200的栅格地图上以毫秒级的速度进行综合,突出了其实时适用性。
🔬 方法详解
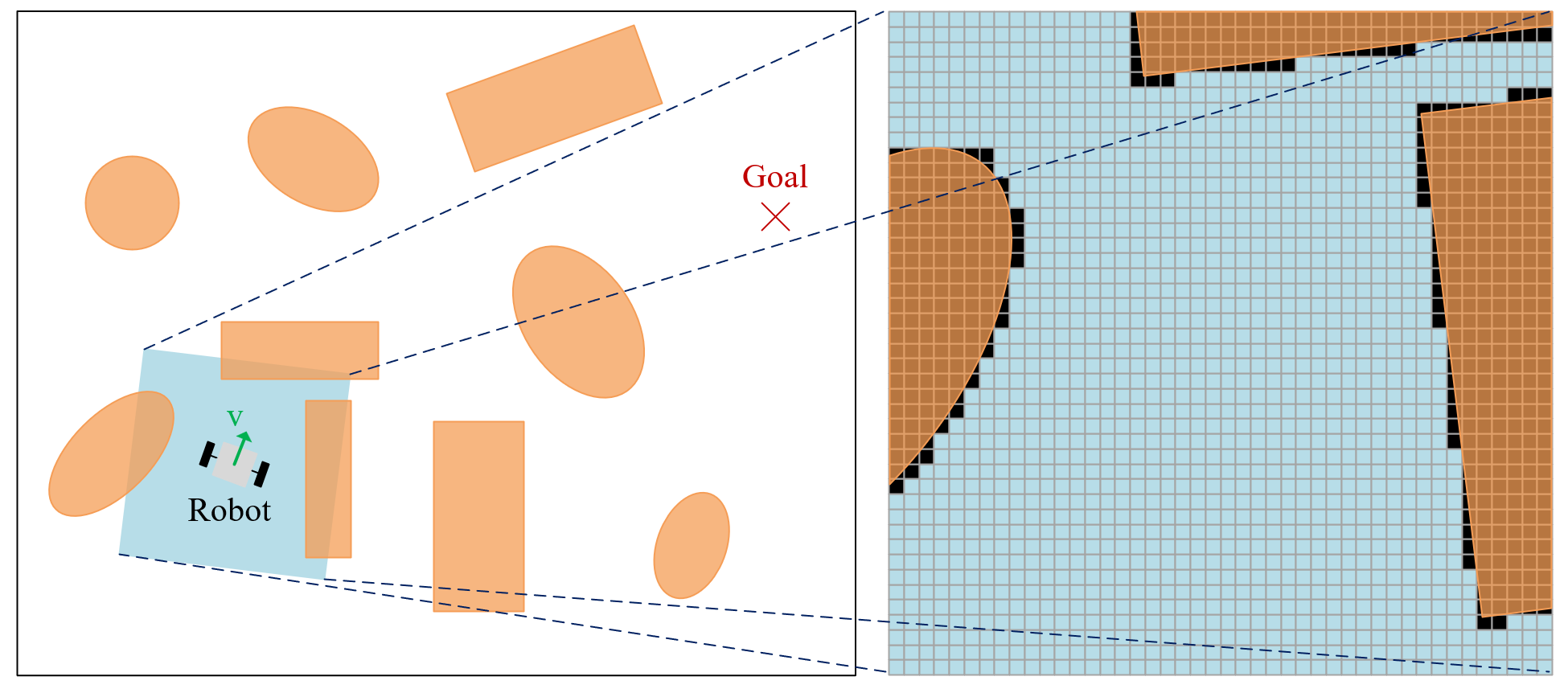
问题定义:论文旨在解决在未知环境中,如何利用机器人感知到的局部栅格地图,实时生成控制屏障函数(CBF),从而保证机器人安全导航的问题。现有方法通常假设环境完全已知,或者计算复杂度高,难以满足实时性要求。因此,如何在感知信息有限的情况下,高效地合成CBF是本研究要解决的核心问题。
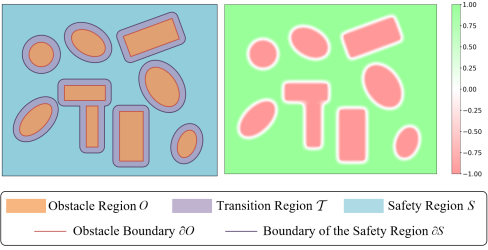
核心思路:论文的核心思路是将CBF的平滑性要求与稳态热传导方程联系起来。具体来说,将障碍物边界设置为恒温热源,自由空间设置为绝热区域,则CBF的值可以看作是稳态热场中的温度分布。通过求解热传导方程,可以得到满足平滑性要求的CBF,从而保证机器人的安全。这种方法利用了热传导方程的物理意义,使得CBF的构建更加直观和高效。
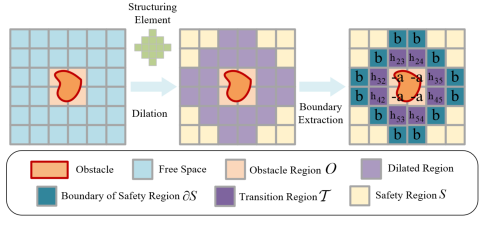
技术框架:该方法主要包含以下几个步骤:1) 利用传感器获取局部栅格地图(OGM)。2) 根据OGM设置热传导方程的边界条件,即障碍物为恒温热源,自由空间为绝热区域。3) 利用有限差分法求解稳态热传导方程,得到每个栅格单元的安全值,即CBF的值。4) 将CBF作为安全约束,设计控制器,保证机器人的安全导航。
关键创新:该论文的关键创新在于将CBF的合成问题转化为求解稳态热传导方程的问题。这种转化使得可以利用热传导方程的物理意义和数值解法,高效地计算CBF。此外,论文还利用了拉普拉斯方程中系数矩阵的稀疏性,进一步提高了计算效率。与现有方法相比,该方法能够在感知信息有限的情况下,实时生成CBF,从而保证机器人在未知环境中的安全导航。
关键设计:在边界条件设置方面,论文将障碍物设置为恒温热源,温度值可以根据实际需求进行调整。在求解热传导方程时,论文采用了有限差分法,并利用了拉普拉斯方程中系数矩阵的稀疏性,从而提高了计算效率。此外,论文还设计了一种基于CBF的控制器,保证机器人在满足安全约束的前提下,尽可能地完成导航任务。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够在200*200的栅格地图上以平均毫秒级的速度合成CBF,验证了其实时性。仿真和真实环境实验均表明,基于该方法生成的CBF能够有效地保证机器人的安全导航,避免与障碍物发生碰撞。该方法在计算效率和安全性方面均表现出优异的性能。
🎯 应用场景
该研究成果可广泛应用于各种自主导航系统,例如服务机器人、无人机、自动驾驶汽车等。尤其在未知或动态环境中,该方法能够实时生成安全约束,保障机器人的安全运行。此外,该方法还可以扩展到其他安全关键型应用,例如人机协作、医疗机器人等,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Control Barrier Functions (CBFs) have emerged as an effective and non-invasive safety filter for ensuring the safety of autonomous systems in dynamic environments with formal guarantees. However, most existing works on CBF synthesis focus on fully known settings. Synthesizing CBFs online based on perception data in unknown environments poses particular challenges. Specifically, this requires the construction of CBFs from high-dimensional data efficiently in real time. This paper proposes a new approach for online synthesis of CBFs directly from local Occupancy Grid Maps (OGMs). Inspired by steady-state thermal fields, we show that the smoothness requirement of CBFs corresponds to the solution of the steady-state heat conduction equation with suitably chosen boundary conditions. By leveraging the sparsity of the coefficient matrix in Laplace's equation, our approach allows for efficient computation of safety values for each grid cell in the map. Simulation and real-world experiments demonstrate the effectiveness of our approach. Specifically, the results show that our CBFs can be synthesized in an average of milliseconds on a 200 * 200 grid map, highlighting its real-time applicability.