PROBE: Proprioceptive Obstacle Detection and Estimation while Navigating in Clutter
作者: Dhruv Metha Ramesh, Aravind Sivaramakrishnan, Shreesh Keskar, Kostas E. Bekris, Jingjin Yu, Abdeslam Boularias
分类: cs.RO
发布日期: 2025-05-17
💡 一句话要点
提出PROBE,利用本体感觉进行杂乱环境中障碍物检测与估计
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 本体感觉 障碍物检测 Transformer网络 机器人导航 四足机器人
📋 核心要点
- 现有方法在复杂环境中依赖视觉等外部传感器进行障碍物检测,易受遮挡和视野限制影响。
- PROBE利用机器人自身的扭矩和运动信息,通过Transformer网络学习障碍物的存在、尺寸和姿态。
- 在模拟和真实机器人实验中验证了PROBE的有效性,无需外部传感器即可实现障碍物检测。
📝 摘要(中文)
在诸如恶劣环境下的搜索与救援等关键应用中,障碍物普遍存在,由于遮挡和机载相机传感器视野范围的限制,阻碍了某些传感方式(特别是视觉)的有效部署。为了使机器人能够应对这些挑战,我们提出了一种新方法PROBE,即在杂乱环境中导航时进行本体感觉障碍物检测和估计,该方法仅依赖于机器人的本体感觉来推断被遮挡的矩形障碍物的存在与否,同时预测它们在SE(2)中的尺寸和姿态。所提出的方法是一个Transformer神经网络,它接收机器人施加的扭矩历史和感知的全身运动作为输入,并返回环境中障碍物的参数化表示。PROBE的有效性在Isaac Gym的模拟环境和真实的Unitree Go1四足机器人上进行了评估。
🔬 方法详解
问题定义:论文旨在解决在复杂、遮挡严重的环境中,机器人仅依靠自身本体感觉(扭矩和运动信息)进行障碍物检测和姿态估计的问题。现有方法通常依赖视觉或其他外部传感器,但在恶劣环境中,这些传感器容易失效或受到限制,导致机器人无法有效导航。
核心思路:论文的核心思路是利用机器人与环境交互时产生的本体感觉信息,学习一个从扭矩和运动到障碍物参数的映射。通过分析机器人如何响应环境中的障碍物,推断障碍物的存在、形状和位置。这种方法无需外部传感器,更具鲁棒性。
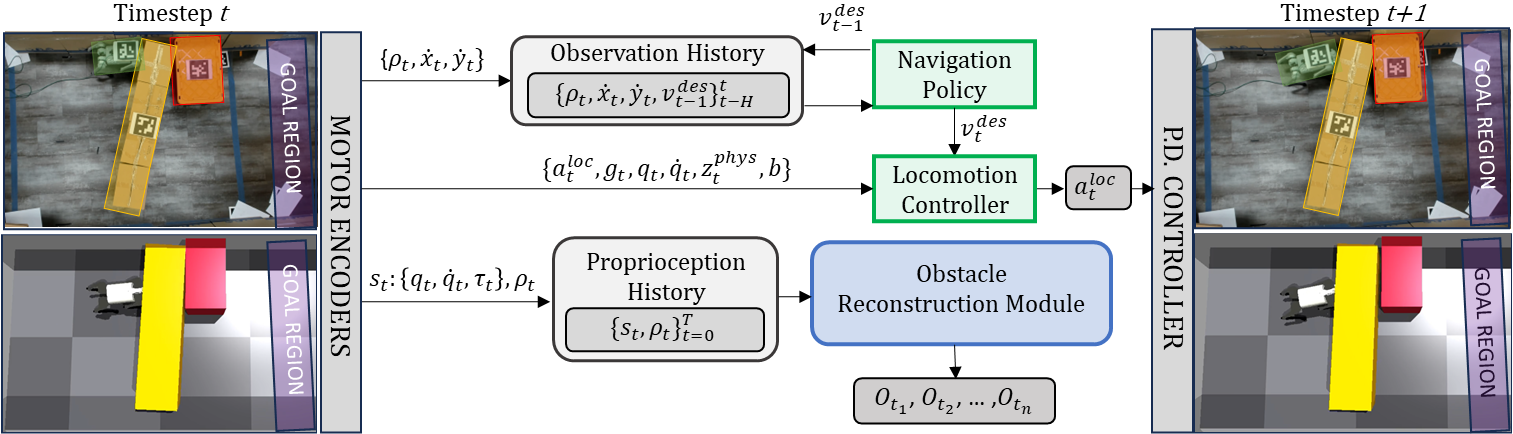
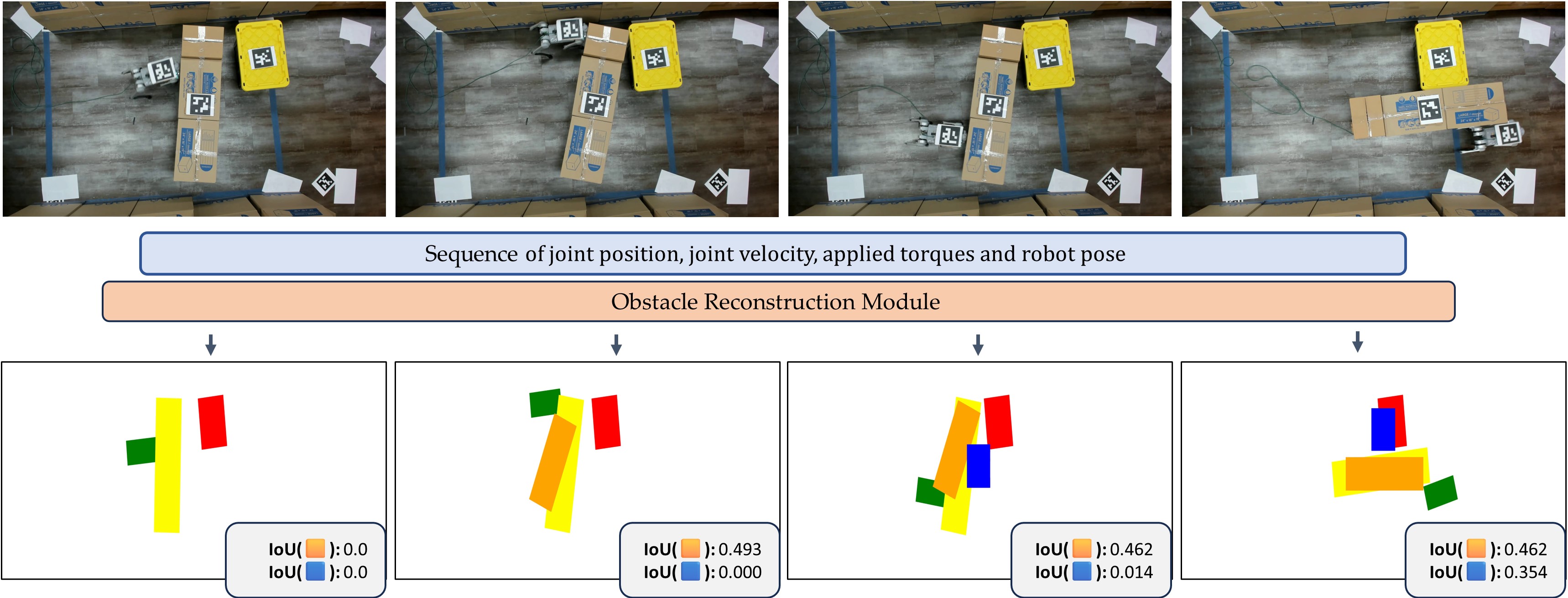
技术框架:PROBE采用Transformer神经网络作为核心模型。整体流程如下:1) 机器人运动过程中,记录一段时间内的扭矩和运动数据;2) 将这些数据作为Transformer网络的输入;3) Transformer网络输出障碍物的参数化表示,包括障碍物的存在概率、尺寸和姿态。
关键创新:PROBE的关键创新在于:1) 仅使用本体感觉进行障碍物检测和估计,摆脱了对外部传感器的依赖;2) 使用Transformer网络处理时序的扭矩和运动数据,能够有效捕捉机器人与环境的交互关系;3) 输出障碍物的参数化表示,方便后续的路径规划和控制。
关键设计:Transformer网络的输入是扭矩和运动数据的时序序列。输出层设计为预测障碍物的参数,包括:1) 障碍物存在概率(二元分类);2) 障碍物的尺寸(长和宽);3) 障碍物在SE(2)空间中的姿态(位置和方向)。损失函数包括分类损失(用于障碍物存在概率)和回归损失(用于尺寸和姿态)。具体的网络结构和参数设置在论文中有详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
论文在Isaac Gym模拟环境和真实的Unitree Go1四足机器人上进行了实验验证。实验结果表明,PROBE能够有效地检测和估计障碍物的存在、尺寸和姿态。具体性能数据(例如检测精度、姿态估计误差等)和与基线方法的对比结果在论文中有详细描述(未知),但摘要表明PROBE在无需外部传感器的情况下实现了有效的障碍物检测。
🎯 应用场景
PROBE在恶劣环境下的搜索救援、灾后重建、自主导航等领域具有广泛的应用前景。该方法无需依赖外部传感器,能够在遮挡严重、光照不足等复杂环境中实现可靠的障碍物检测和估计,提高机器人的自主性和适应性。未来可应用于四足机器人、人形机器人等多种平台。
📄 摘要(原文)
In critical applications, including search-and-rescue in degraded environments, blockages can be prevalent and prevent the effective deployment of certain sensing modalities, particularly vision, due to occlusion and the constrained range of view of onboard camera sensors. To enable robots to tackle these challenges, we propose a new approach, Proprioceptive Obstacle Detection and Estimation while navigating in clutter PROBE, which instead relies only on the robot's proprioception to infer the presence or absence of occluded rectangular obstacles while predicting their dimensions and poses in SE(2). The proposed approach is a Transformer neural network that receives as input a history of applied torques and sensed whole-body movements of the robot and returns a parameterized representation of the obstacles in the environment. The effectiveness of PROBE is evaluated on simulated environments in Isaac Gym and with a real Unitree Go1 quadruped robot.