Bracing for Impact: Robust Humanoid Push Recovery and Locomotion with Reduced Order Models
作者: Lizhi Yang, Blake Werner, Adrian B. Ghansah, Aaron D. Ames
分类: cs.RO
发布日期: 2025-05-16
💡 一句话要点
提出基于降阶模型的统一框架,实现人oids在行走过程中的鲁棒抗扰和平衡恢复。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人oid机器人 抗扰恢复 模型预测控制 混合线性倒立摆 步态控制
📋 核心要点
- 人oid在复杂环境中行走时,易受外部扰动影响,传统的平衡控制方法难以有效应对强扰动。
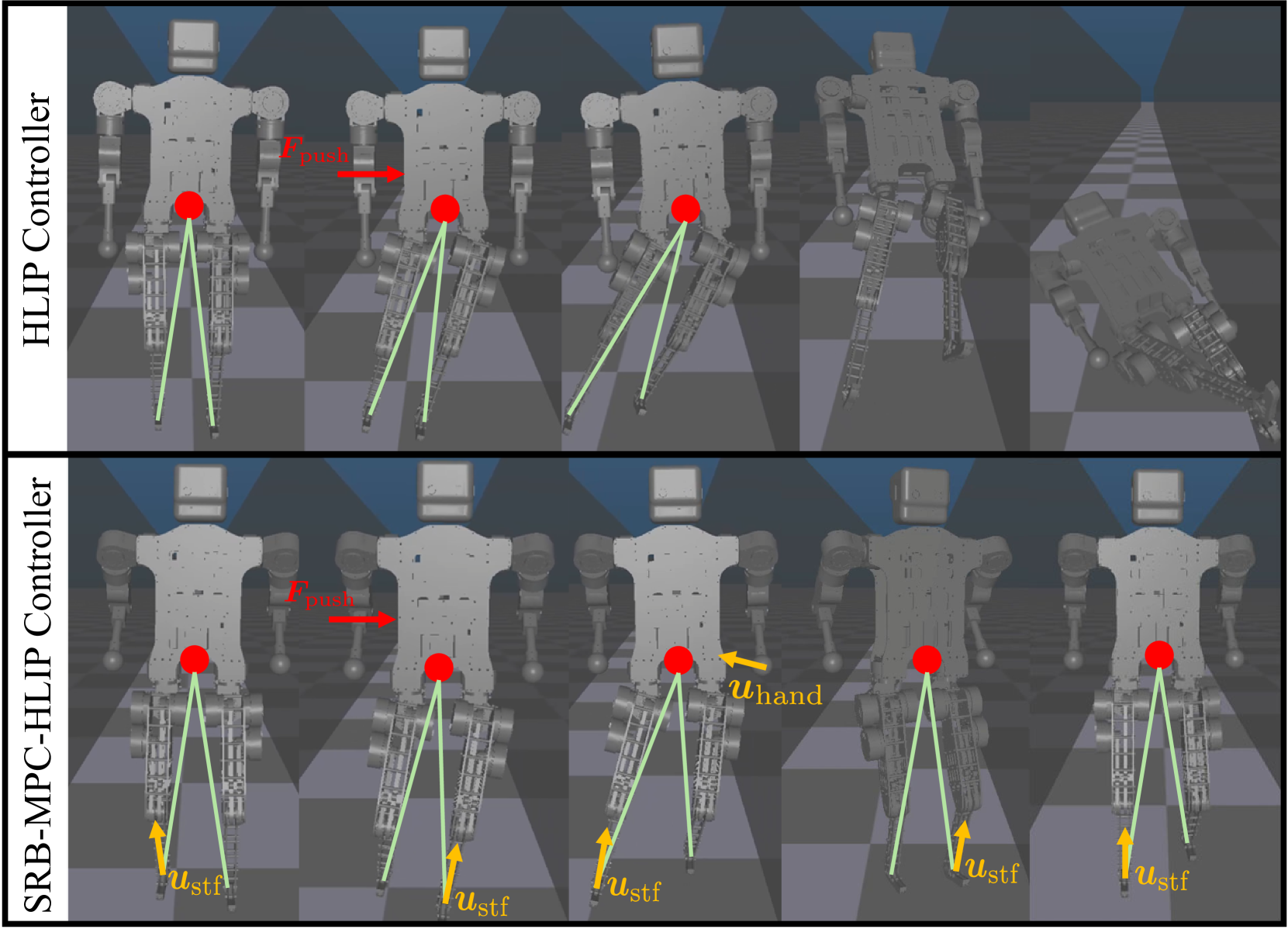
- 论文提出结合SRB-MPC和HLIP动力学的统一框架,利用手臂与环境交互,实现鲁棒的抗扰恢复和动态行走。
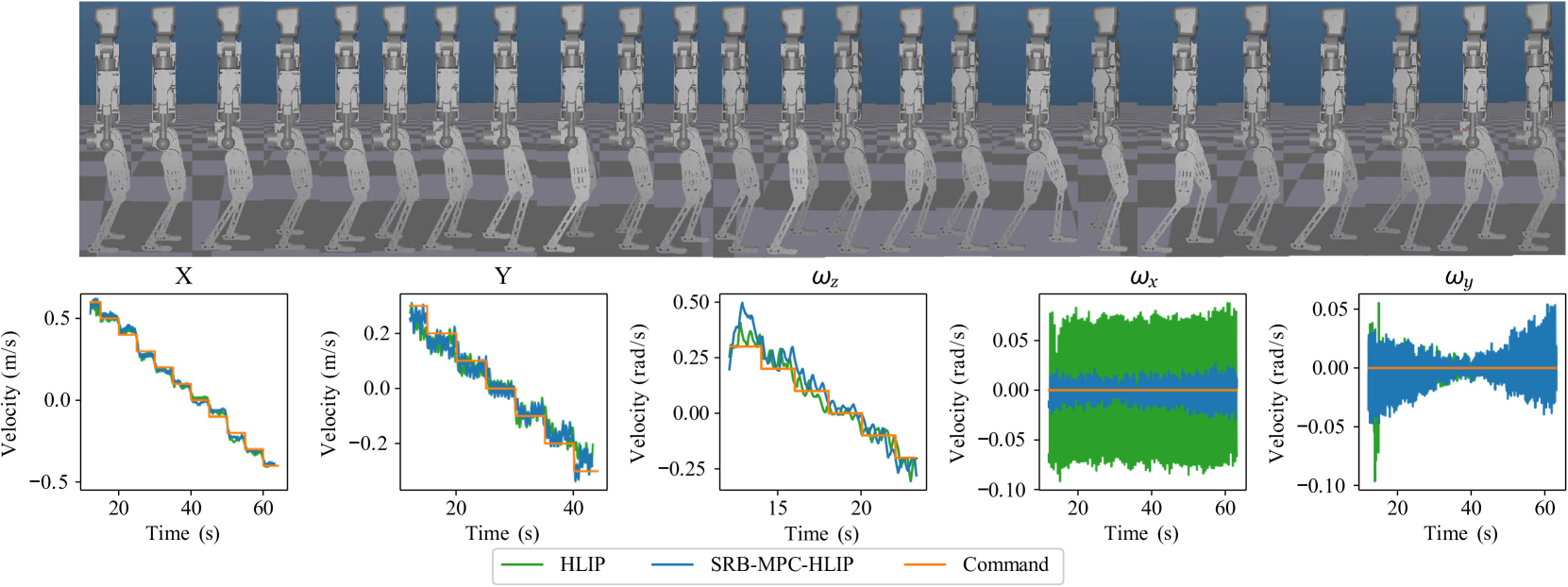
- 仿真结果表明,该方法能有效抑制扰动,提高跟踪性能,使人oid在行走时能抵抗高达100N的推力。
📝 摘要(中文)
本文提出了一个统一的框架,用于人oids的行走控制和抗扰恢复,旨在促进人oids在以人为中心的环境中的部署。该框架利用手臂进行抗扰恢复,同时保持动态行走。关键创新在于结合单刚体模型预测控制(SRB-MPC)与混合线性倒立摆(HLIP)动力学,利用环境(如墙壁)来辅助抗扰恢复。通过使用机器人手臂支撑墙壁并动态调整期望的接触力和步态模式,实现鲁棒的运动、扰动检测和恢复。在人oid机器人上的大量仿真结果表明,与单独使用HLIP相比,该方法在扰动抑制和跟踪性能方面有所提高。机器人能够在以高达0.5m/s的速度行走时,恢复高达100N、持续0.2s的推力。在倾斜墙壁和多方向推力场景中进一步验证了鲁棒性。
🔬 方法详解
问题定义:现有的人oid平衡控制方法在面对外部强扰动时,尤其是在行走过程中,往往难以维持平衡。传统的基于倒立摆模型的控制方法虽然简单高效,但在处理复杂环境交互和高强度扰动时存在局限性。因此,需要一种更鲁棒的控制策略,使人oid能够在行走过程中有效地抵抗外部推力,并快速恢复平衡。
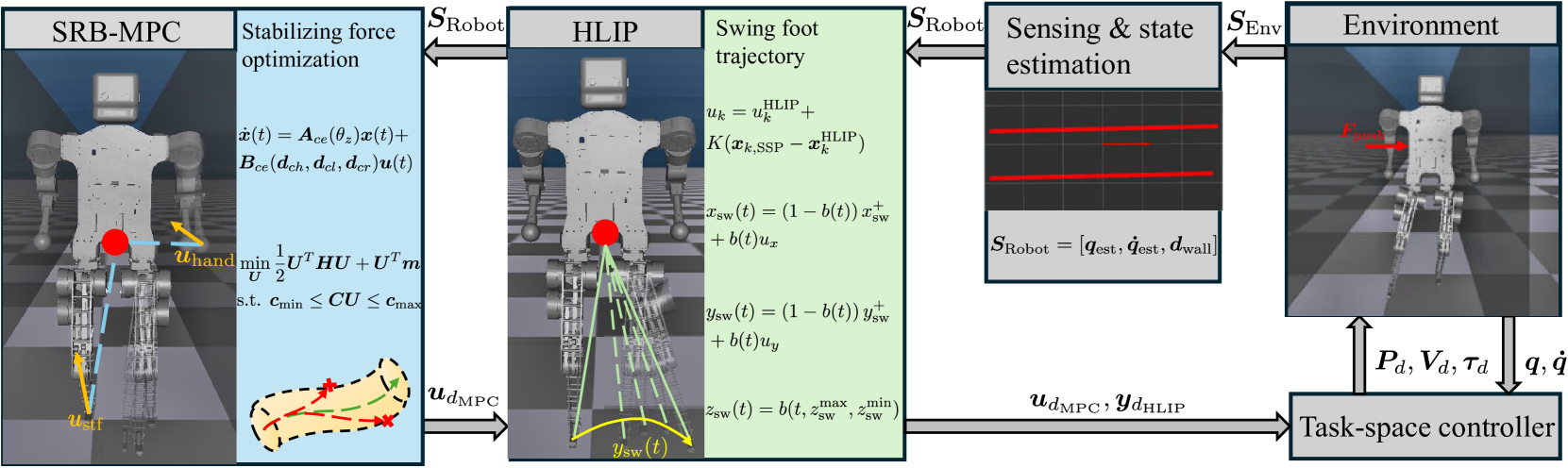
核心思路:论文的核心思路是结合单刚体模型预测控制(SRB-MPC)的全局优化能力和混合线性倒立摆(HLIP)动力学的快速计算特性,同时利用人oid的手臂与环境进行交互,例如支撑墙壁。通过预测未来状态并优化控制输入,使机器人能够提前感知并应对外部扰动,并利用手臂提供的额外支撑力来维持平衡。
技术框架:该框架主要包含以下几个模块:1) 扰动检测模块:用于检测外部推力的方向和大小。2) SRB-MPC模块:基于单刚体模型预测机器人未来的运动状态,并优化机器人的重心位置、步态和接触力。3) HLIP动力学模块:用于快速计算机器人的运动轨迹和控制输入。4) 手臂控制模块:根据SRB-MPC的优化结果,控制手臂与环境进行交互,提供额外的支撑力。整体流程是:首先检测外部扰动,然后SRB-MPC根据扰动信息优化机器人的运动轨迹和接触力,HLIP动力学模块快速计算控制输入,最后手臂控制模块控制手臂与环境交互,共同实现抗扰恢复。
关键创新:该论文最重要的技术创新点在于将SRB-MPC和HLIP动力学相结合,并利用手臂与环境进行交互。SRB-MPC能够进行全局优化,预测未来状态,而HLIP动力学能够快速计算控制输入。通过手臂与环境的交互,机器人能够获得额外的支撑力,从而提高抗扰能力。与传统的基于倒立摆模型的控制方法相比,该方法能够更好地应对复杂环境和高强度扰动。
关键设计:SRB-MPC模块的关键设计包括:1) 状态空间模型的构建,需要准确描述机器人的运动学和动力学特性。2) 目标函数的选择,需要综合考虑机器人的平衡性、运动轨迹跟踪和能量消耗。3) 约束条件的设计,需要保证机器人的运动轨迹在可行范围内,并避免碰撞。手臂控制模块的关键设计包括:1) 接触力模型的建立,需要准确描述手臂与环境之间的相互作用力。2) 控制策略的选择,需要保证手臂能够稳定地支撑墙壁,并提供足够的支撑力。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,该方法能够显著提高人oid机器人的抗扰能力和跟踪性能。与单独使用HLIP相比,该方法能够使机器人在以高达0.5m/s的速度行走时,恢复高达100N、持续0.2s的推力。此外,该方法在倾斜墙壁和多方向推力场景中也表现出良好的鲁棒性,验证了其在复杂环境中的适用性。
🎯 应用场景
该研究成果可应用于人oid机器人在复杂环境中的导航、操作和救援任务。例如,在拥挤的工厂车间或灾难现场,人oid机器人可以利用该方法抵抗外部扰动,保持平衡,从而安全地完成任务。此外,该方法还可以应用于康复机器人领域,帮助患者进行平衡训练和步态恢复。
📄 摘要(原文)
Push recovery during locomotion will facilitate the deployment of humanoid robots in human-centered environments. In this paper, we present a unified framework for walking control and push recovery for humanoid robots, leveraging the arms for push recovery while dynamically walking. The key innovation is to use the environment, such as walls, to facilitate push recovery by combining Single Rigid Body model predictive control (SRB-MPC) with Hybrid Linear Inverted Pendulum (HLIP) dynamics to enable robust locomotion, push detection, and recovery by utilizing the robot's arms to brace against such walls and dynamically adjusting the desired contact forces and stepping patterns. Extensive simulation results on a humanoid robot demonstrate improved perturbation rejection and tracking performance compared to HLIP alone, with the robot able to recover from pushes up to 100N for 0.2s while walking at commanded speeds up to 0.5m/s. Robustness is further validated in scenarios with angled walls and multi-directional pushes.