Unleashing Humanoid Reaching Potential via Real-world-Ready Skill Space
作者: Zhikai Zhang, Chao Chen, Han Xue, Jilong Wang, Sikai Liang, Yun Liu, Zongzhang Zhang, He Wang, Li Yi
分类: cs.RO
发布日期: 2025-05-16 (更新: 2025-12-18)
💡 一句话要点
提出R2S2技能空间,实现人型机器人大范围、零样本的真实环境抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 技能空间 sim2real迁移 强化学习 抓取任务
📋 核心要点
- 人形机器人大范围抓取面临全身控制难题,现有方法优化困难,sim2real迁移性差。
- R2S2方法构建真实世界技能库,集成到统一潜在空间,作为结构化先验指导任务执行。
- 实验证明R2S2能实现零样本sim2real迁移,并在复杂抓取场景中表现出色。
📝 摘要(中文)
人类在3D世界中拥有巨大的可达空间,能够与不同高度和距离的物体进行交互。然而,在人形机器人上实现如此大的空间抓取是一个复杂的全身控制问题,需要机器人同时掌握多种技能,包括基座定位和重新定向、高度和身体姿势调整以及末端执行器姿态控制。从头开始学习通常会导致优化困难和较差的sim2real迁移性。为了解决这个挑战,我们提出了Real-world-Ready Skill Space (R2S2)。我们的方法从一个精心设计的技能库开始,该技能库由真实世界可用的原始技能组成。我们通过单独的技能调整和sim2real评估来确保最佳性能和强大的sim2real迁移。然后,这些技能被集成到一个统一的潜在空间中,作为一个结构化的先验,以高效且sim2real可迁移的方式帮助任务执行。一个经过训练的高级规划器从这个空间中采样技能,使机器人能够完成真实的抓取任务。我们展示了零样本sim2real迁移,并在多个具有挑战性的目标抓取场景中验证了R2S2。
🔬 方法详解
问题定义:论文旨在解决人形机器人在真实环境中进行大范围抓取的问题。现有方法通常面临优化困难,难以实现有效的sim2real迁移,导致在真实环境中性能不佳。这些方法难以同时处理基座定位、姿态调整和末端执行器控制等多个复杂因素。
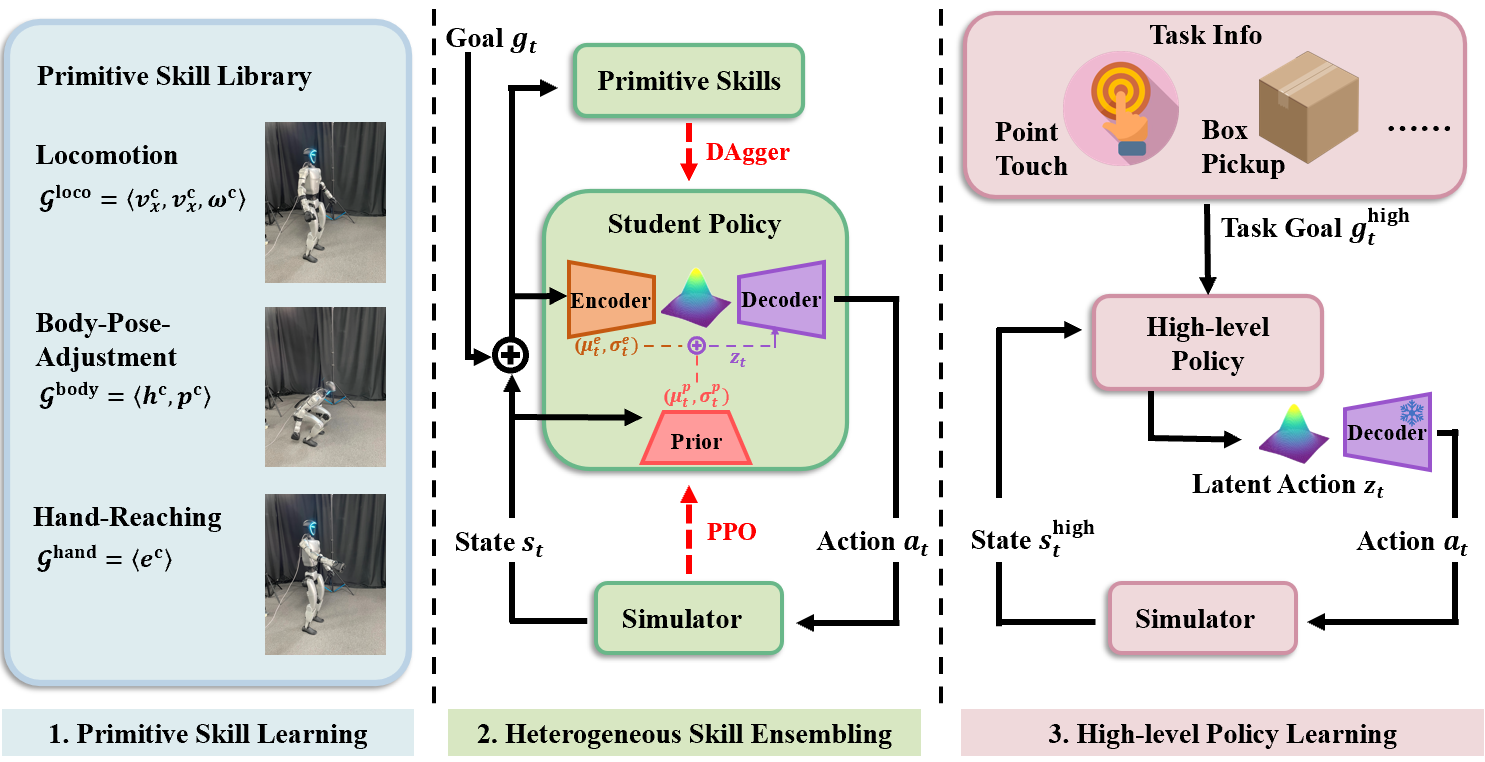
核心思路:论文的核心思路是构建一个“真实世界就绪的技能空间”(Real-world-Ready Skill Space, R2S2)。通过预先定义和优化一系列真实世界可用的基础技能,并将它们整合到一个统一的潜在空间中,从而为机器人提供一个结构化的先验知识。这样,机器人可以通过学习在这个技能空间中进行选择和组合,从而更有效地完成复杂的抓取任务。
技术框架:R2S2框架主要包含以下几个模块:1) 技能库构建:设计并实现一系列真实世界可用的基础技能,例如基座移动、高度调整、末端执行器姿态控制等。2) 技能优化:对每个技能进行单独的优化和sim2real评估,确保其在真实环境中具有良好的性能。3) 潜在空间集成:将优化后的技能集成到一个统一的潜在空间中,形成一个结构化的技能空间。4) 高级规划器:训练一个高级规划器,使其能够从技能空间中选择合适的技能序列,以完成特定的抓取任务。
关键创新:该方法最重要的创新在于构建了一个真实世界就绪的技能空间,并将其作为一种结构化的先验知识来指导机器人的行为。与从头开始学习相比,这种方法可以显著提高学习效率和sim2real迁移性。此外,通过将多个基础技能集成到一个统一的潜在空间中,该方法能够实现更灵活和高效的技能组合。
关键设计:技能库的设计需要考虑真实机器人的运动能力和环境约束。技能优化过程可能涉及到强化学习或模仿学习等方法,并需要仔细设计奖励函数或损失函数,以确保技能的性能和鲁棒性。潜在空间的集成可以使用自编码器或其他降维技术,以实现对技能的有效表示和组合。高级规划器的训练可以使用强化学习或监督学习等方法,并需要设计合适的奖励函数或损失函数,以鼓励机器人选择合适的技能序列。
🖼️ 关键图片
📊 实验亮点
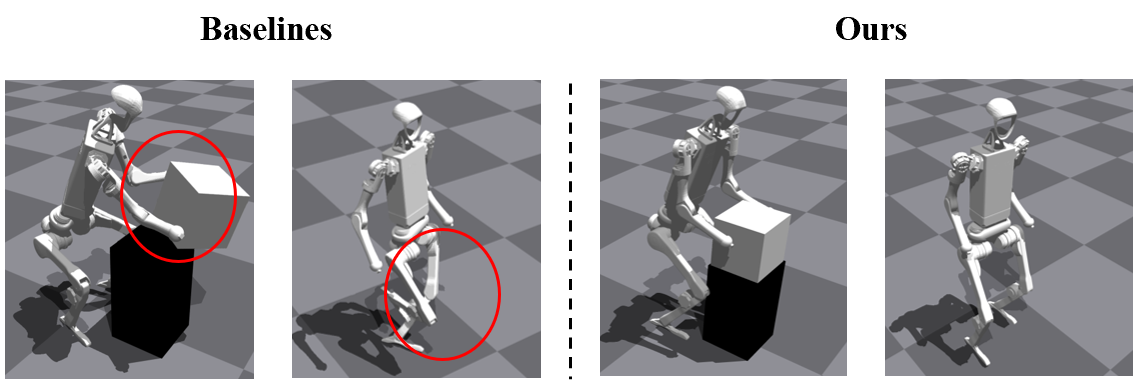
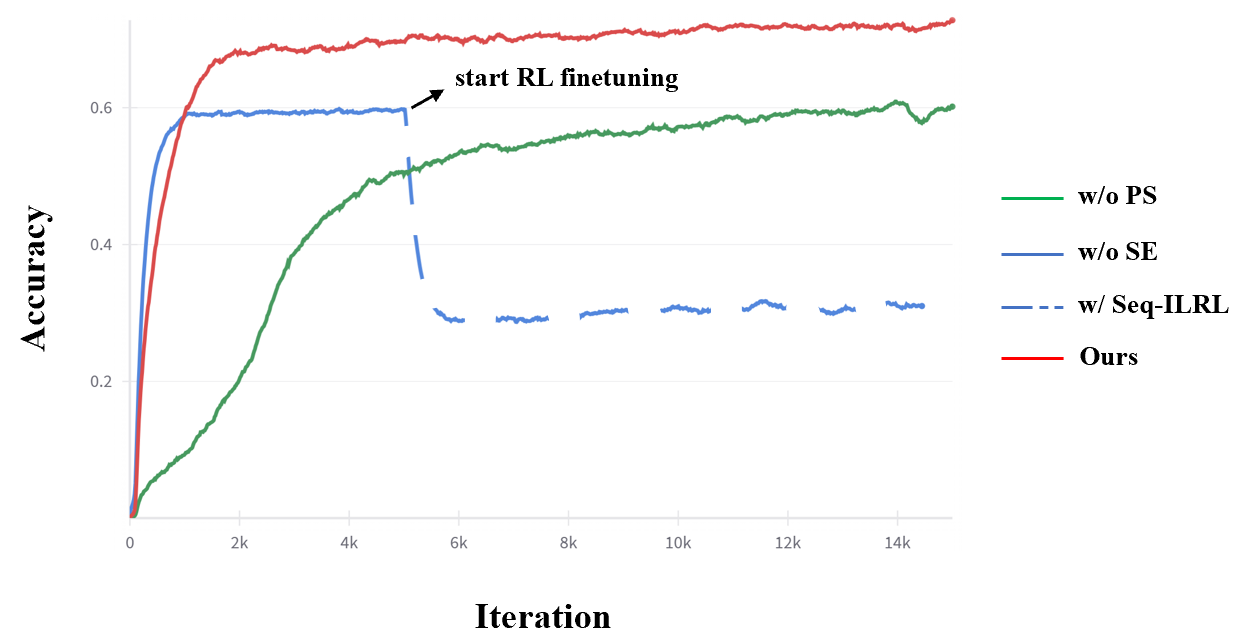
论文展示了R2S2在多个具有挑战性的目标抓取场景中的零样本sim2real迁移能力。实验结果表明,R2S2能够有效地解决人形机器人在真实环境中进行大范围抓取的问题,并且具有良好的泛化能力。
🎯 应用场景
该研究成果可应用于人形机器人在复杂环境中的操作任务,例如家庭服务、工业自动化、医疗辅助等。通过R2S2技能空间,机器人能够更好地适应真实世界的变化和不确定性,从而实现更安全、高效和可靠的操作。
📄 摘要(原文)
Humans possess a large reachable space in the 3D world, enabling interaction with objects at varying heights and distances. However, realizing such large-space reaching on humanoids is a complex whole-body control problem and requires the robot to master diverse skills simultaneously-including base positioning and reorientation, height and body posture adjustments, and end-effector pose control. Learning from scratch often leads to optimization difficulty and poor sim2real transferability. To address this challenge, we propose Real-world-Ready Skill Space (R2S2). Our approach begins with a carefully designed skill library consisting of real-world-ready primitive skills. We ensure optimal performance and robust sim2real transfer through individual skill tuning and sim2real evaluation. These skills are then ensembled into a unified latent space, serving as a structured prior that helps task execution in an efficient and sim2real transferable manner. A high-level planner, trained to sample skills from this space, enables the robot to accomplish real-world goal-reaching tasks. We demonstrate zero-shot sim2real transfer and validate R2S2 in multiple challenging goal-reaching scenarios.