Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps
作者: Kentaro Barhydt, O. Godson Osele, Sreela Kodali, Cosima du Pasquier, Chase M. Hartquist, H. Harry Asada, Allison M. Okamura
分类: cs.RO
发布日期: 2025-05-15 (更新: 2025-05-19)
期刊: Science Advances 11, ady9581 (2025)
💡 一句话要点
提出闭环抓取,通过拓扑变换实现强力、轻柔、多功能的机器人抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 闭环控制 拓扑变换 软体机器人 柔性抓取
📋 核心要点
- 现有抓取机制难以兼顾抓取的强度、轻柔性和多功能性,限制了其在复杂环境中的应用。
- 闭环抓取通过开环抓取创建和闭环抓取保持之间的拓扑变换,分别满足抓取创建和保持的不同需求。
- 该方法使用软性可膨胀梁等组件实现,能够抓取传统方法难以处理的物体和环境。
📝 摘要(中文)
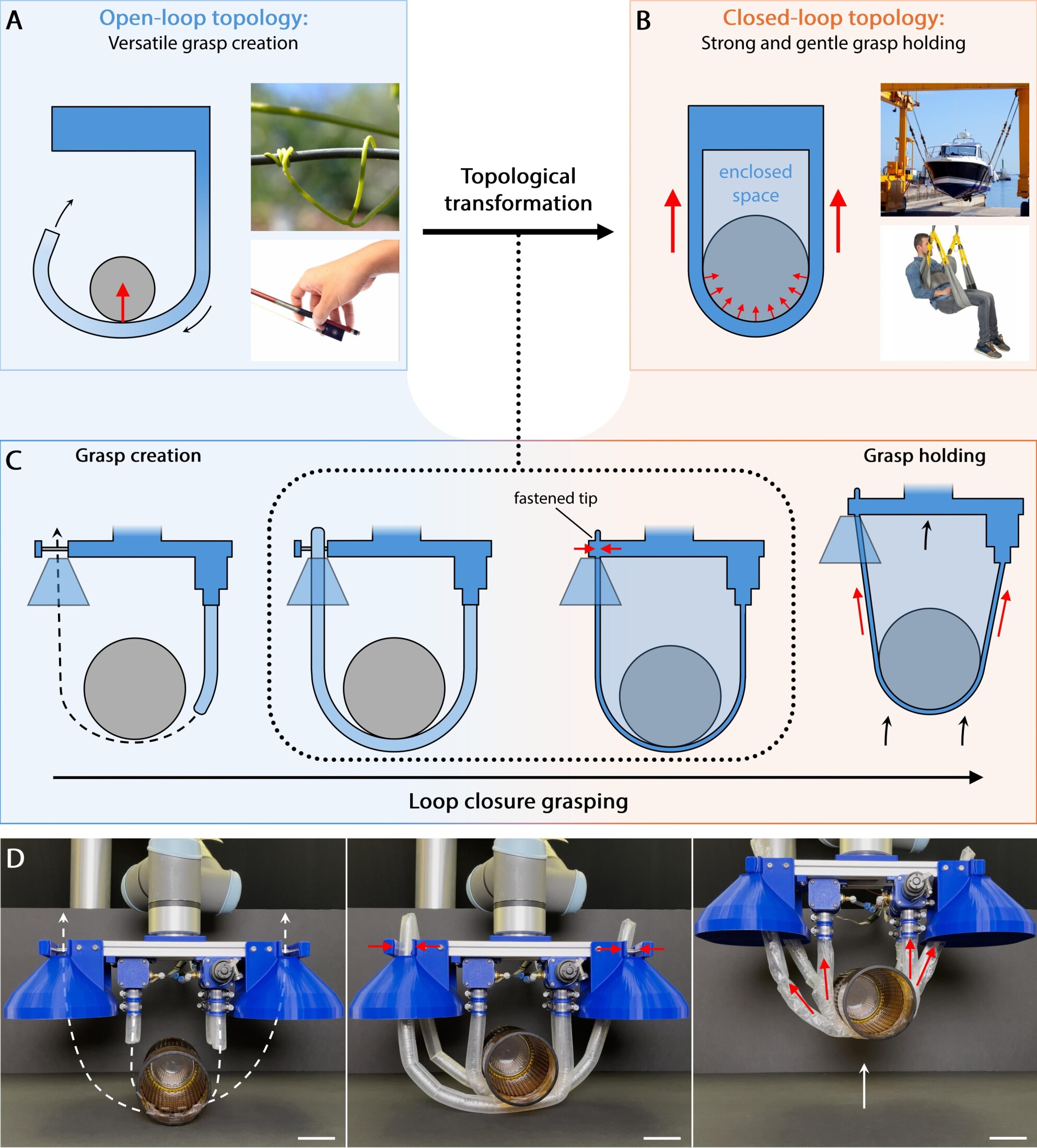
现有的抓取机制通常采用单一形态来满足抓取创建和保持的不同功能需求,但难以同时实现强度、轻柔性和多功能性。本文提出了一种名为“闭环抓取”的机器人抓取方法,通过开环和闭环形态之间的拓扑变换来解决这些不同的功能需求。论文形式化了用于抓取的这些形态,阐述了闭环抓取方法,并提出了一个使用软性可膨胀梁、绞盘和夹具的设计架构。该机制的初始开环拓扑结构通过不受约束的末端运动实现了多功能的抓取创建,而闭合环路则通过有效的无限弯曲柔顺性实现了强大而轻柔的保持。闭环抓取规避了单一形态设计的权衡,从而能够抓取历史上具有挑战性的物体、环境和配置。
🔬 方法详解
问题定义:现有机器人抓取方法通常采用单一形态的机械结构,难以同时满足抓取创建阶段对灵活性的需求和抓取保持阶段对强度和稳定性的需求。例如,平行爪在抓取形状各异的物体时可能受限,而吸盘抓取则对物体表面材质有较高要求。因此,如何设计一种既能灵活适应不同物体形状,又能提供足够抓取力度的通用抓取机制是一个挑战。
核心思路:闭环抓取的核心思路是通过拓扑变换,在抓取创建阶段采用开环结构,利用其灵活性实现对物体的快速适应和抓取;在抓取保持阶段,通过闭合环路,形成稳定的结构,从而提供足够的抓取强度和柔顺性。这种设计借鉴了生物抓取的灵活性和稳定性,旨在克服传统抓取机制的局限性。
技术框架:闭环抓取系统主要包含以下几个模块:1)软性可膨胀梁:作为抓取器的主要执行机构,通过充气实现伸展和弯曲,从而适应物体形状。2)绞盘:用于控制软性梁的运动,实现抓取的精确控制。3)夹具:用于闭合环路,形成稳定的抓取结构。4)控制系统:根据物体形状和抓取需求,控制软性梁的运动和夹具的闭合。整个流程包括:(1)开环状态下,软性梁伸展并环绕目标物体;(2)调整软性梁的位置和姿态,使其与物体表面紧密接触;(3)闭合夹具,形成闭环结构;(4)通过控制软性梁的压力和夹具的夹紧力,实现稳定的抓取。
关键创新:闭环抓取的关键创新在于其拓扑变换的设计。通过在开环和闭环两种形态之间切换,实现了抓取创建阶段的灵活性和抓取保持阶段的稳定性的兼顾。这种设计突破了传统抓取机制的单一形态限制,为实现通用抓取提供了一种新的思路。
关键设计:软性梁的材料选择和结构设计是关键。需要选择具有足够柔韧性和强度的材料,例如硅胶或TPU。梁的内部结构可以采用多腔室设计,通过控制不同腔室的压力来实现更复杂的弯曲和变形。夹具的设计需要保证闭合的可靠性和稳定性,同时避免对物体表面造成损伤。控制算法需要根据物体形状和抓取需求,精确控制软性梁的运动和夹具的闭合。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了闭环抓取方法的有效性。实验结果表明,该方法能够成功抓取各种形状和材质的物体,包括传统抓取方法难以处理的物体,例如易碎品和不规则形状物体。具体性能数据未知,但定性结果表明该方法在抓取能力上优于传统方法。
🎯 应用场景
闭环抓取技术具有广泛的应用前景,例如在医疗领域,可以用于抓取脆弱的生物组织;在工业领域,可以用于抓取形状各异的零件;在家庭服务领域,可以用于抓取各种生活用品。该技术有望提高机器人抓取的通用性和适应性,使其能够更好地服务于人类。
📄 摘要(原文)
Grasping mechanisms must both create and subsequently hold grasps that permit safe and effective object manipulation. Existing mechanisms address the different functional requirements of grasp creation and grasp holding using a single morphology, but have yet to achieve the simultaneous strength, gentleness, and versatility needed for many applications. We present "loop closure grasping", a class of robotic grasping that addresses these different functional requirements through topological transformations between open-loop and closed-loop morphologies. We formalize these morphologies for grasping, formulate the loop closure grasping method, and present principles and a design architecture that we implement using soft growing inflated beams, winches, and clamps. The mechanisms' initial open-loop topology enables versatile grasp creation via unencumbered tip movement, and closing the loop enables strong and gentle holding with effectively infinite bending compliance. Loop closure grasping circumvents the tradeoffs of single-morphology designs, enabling grasps involving historically challenging objects, environments, and configurations.