pc-dbCBS: Kinodynamic Motion Planning of Physically-Coupled Robot Teams
作者: Khaled Wahba, Wolfgang Hönig
分类: cs.RO, cs.MA, eess.SY
发布日期: 2025-05-15
备注: This work has been submitted to the IEEE for possible publication
💡 一句话要点
提出pc-dbCBS算法,解决物理耦合机器人团队的运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人系统 运动规划 物理耦合 冲突解决 动力学规划
📋 核心要点
- 现有方法在解决物理耦合多机器人系统运动规划问题时,存在结果次优和缺乏理论保证的不足。
- pc-dbCBS通过三级冲突检测和解决框架,并考虑机器人之间的物理耦合,实现了更有效的运动规划。
- 实验结果表明,pc-dbCBS在求解率上提升高达92%,轨迹速度提升50-60%,规划时间减少一个数量级。
📝 摘要(中文)
本文提出了一种名为Physically-coupled discontinuity-bounded Conflict-Based Search (pc-dbCBS)的运动规划器,用于解决复杂环境中物理耦合多机器人系统的高维运动规划问题。现有方法通常结合基于采样的规划器和轨迹优化,但结果次优且缺乏理论保证。pc-dbCBS是随时可用的动力学运动规划器,将discontinuity-bounded CBS扩展到刚性耦合系统。该方法提出了一种三级冲突检测和解决框架,考虑了机器人之间的物理耦合。pc-dbCBS在状态空间表示之间迭代交替,从而在仅依赖单机器人运动原语的同时,保持概率完备性和渐近最优性。在模拟和真实世界的实验中,pc-dbCBS在求解率、轨迹速度和规划时间方面均优于现有技术。
🔬 方法详解
问题定义:论文旨在解决物理耦合多机器人系统在复杂环境中的运动规划问题。现有方法,如结合采样规划器和轨迹优化,通常产生次优解,并且缺乏理论保证,难以满足实际应用需求。高维度状态空间和物理耦合约束进一步增加了问题的复杂性。
核心思路:pc-dbCBS的核心思路是将discontinuity-bounded Conflict-Based Search (dbCBS) 扩展到物理耦合系统。通过迭代地在不同的状态空间表示之间切换,该方法能够在保证概率完备性和渐近最优性的同时,仅依赖于单机器人运动原语,从而降低了计算复杂度。
技术框架:pc-dbCBS采用三层冲突检测和解决框架。第一层检测高层路径冲突,第二层检测轨迹冲突,第三层则考虑物理耦合带来的冲突。算法在检测到冲突后,会生成新的约束条件,并重新规划受影响的机器人的轨迹。此外,pc-dbCBS在不同的状态空间表示之间迭代,以提高规划效率和质量。
关键创新:pc-dbCBS的关键创新在于其对物理耦合的显式建模和三层冲突解决框架。通过考虑机器人之间的物理连接,该方法能够更准确地预测和避免冲突。此外,在不同状态空间表示之间迭代,使得算法能够更好地探索搜索空间,从而找到更优的解。
关键设计:pc-dbCBS的关键设计包括:(1) 物理耦合模型的建立,用于准确预测机器人之间的相互作用;(2) 三层冲突检测和解决框架,用于高效地识别和解决冲突;(3) 状态空间表示的切换策略,用于提高规划效率和质量。具体的参数设置和损失函数等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
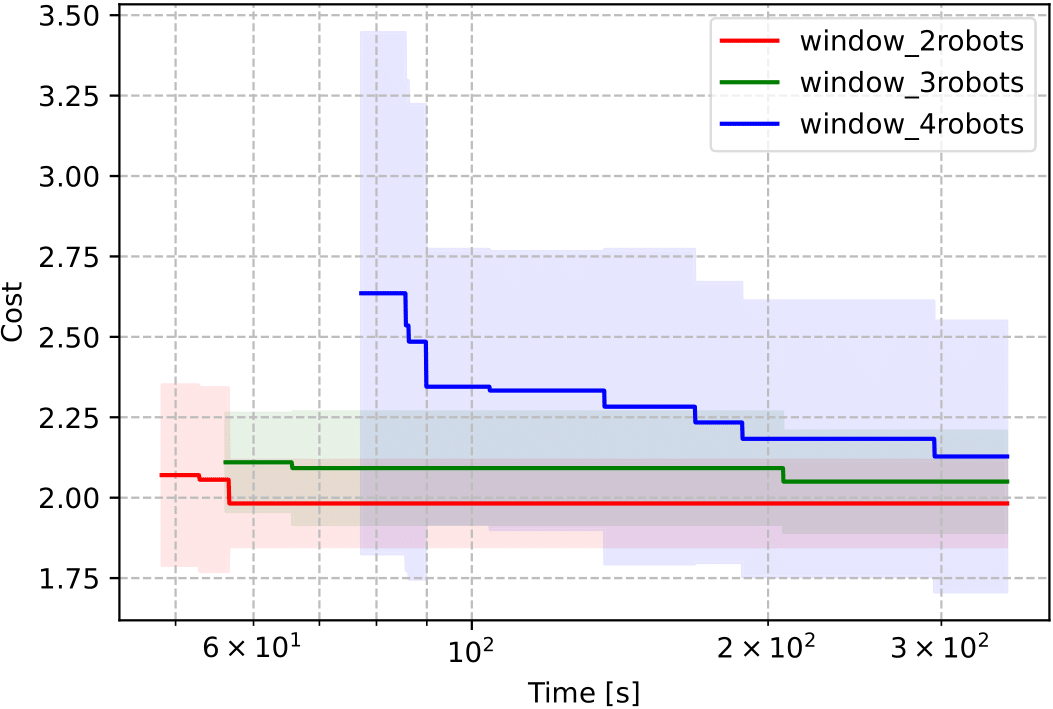
实验结果表明,pc-dbCBS在求解率上显著优于现有技术,能够解决高达92%的测试实例。此外,pc-dbCBS规划的轨迹速度提升了50-60%,同时将规划时间缩短了一个数量级。这些结果表明,pc-dbCBS在解决物理耦合多机器人运动规划问题方面具有显著的优势。
🎯 应用场景
pc-dbCBS算法在需要多个机器人协同完成任务的场景中具有广泛的应用前景,例如:多旋翼无人机协同搬运货物、机器人团队在仓库中进行物料搬运、以及柔性制造系统中多个机器人协同装配等。该算法能够提高任务效率、降低成本,并增强系统的鲁棒性。
📄 摘要(原文)
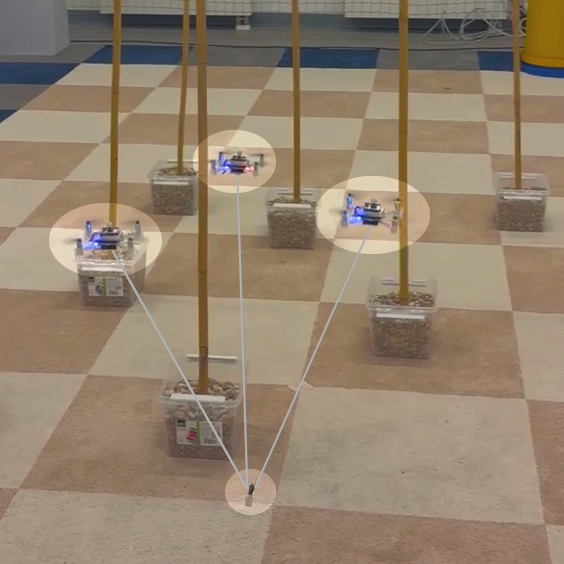
Motion planning problems for physically-coupled multi-robot systems in cluttered environments are challenging due to their high dimensionality. Existing methods combining sampling-based planners with trajectory optimization produce suboptimal results and lack theoretical guarantees. We propose Physically-coupled discontinuity-bounded Conflict-Based Search (pc-dbCBS), an anytime kinodynamic motion planner, that extends discontinuity-bounded CBS to rigidly-coupled systems. Our approach proposes a tri-level conflict detection and resolution framework that includes the physical coupling between the robots. Moreover, pc-dbCBS alternates iteratively between state space representations, thereby preserving probabilistic completeness and asymptotic optimality while relying only on single-robot motion primitives. Across 25 simulated and six real-world problems involving multirotors carrying a cable-suspended payload and differential-drive robots linked by rigid rods, pc-dbCBS solves up to 92% more instances than a state-of-the-art baseline and plans trajectories that are 50-60% faster while reducing planning time by an order of magnitude.