Learning Diverse Natural Behaviors for Enhancing the Agility of Quadrupedal Robots
作者: Huiqiao Fu, Haoyu Dong, Wentao Xu, Zhehao Zhou, Guizhou Deng, Kaiqiang Tang, Daoyi Dong, Chunlin Chen
分类: cs.RO
发布日期: 2025-05-15
💡 一句话要点
提出集成控制器,提升四足机器人敏捷性,实现多样自然行为
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 四足机器人 敏捷性 模仿学习 生成对抗网络 强化学习 运动控制 行为规划
📋 核心要点
- 现有四足机器人难以在真实环境中复现动物般的多样化自然行为,是长期存在的挑战。
- 提出集成控制器,通过半监督生成对抗模仿学习和特权学习,学习多样行为并高效执行任务。
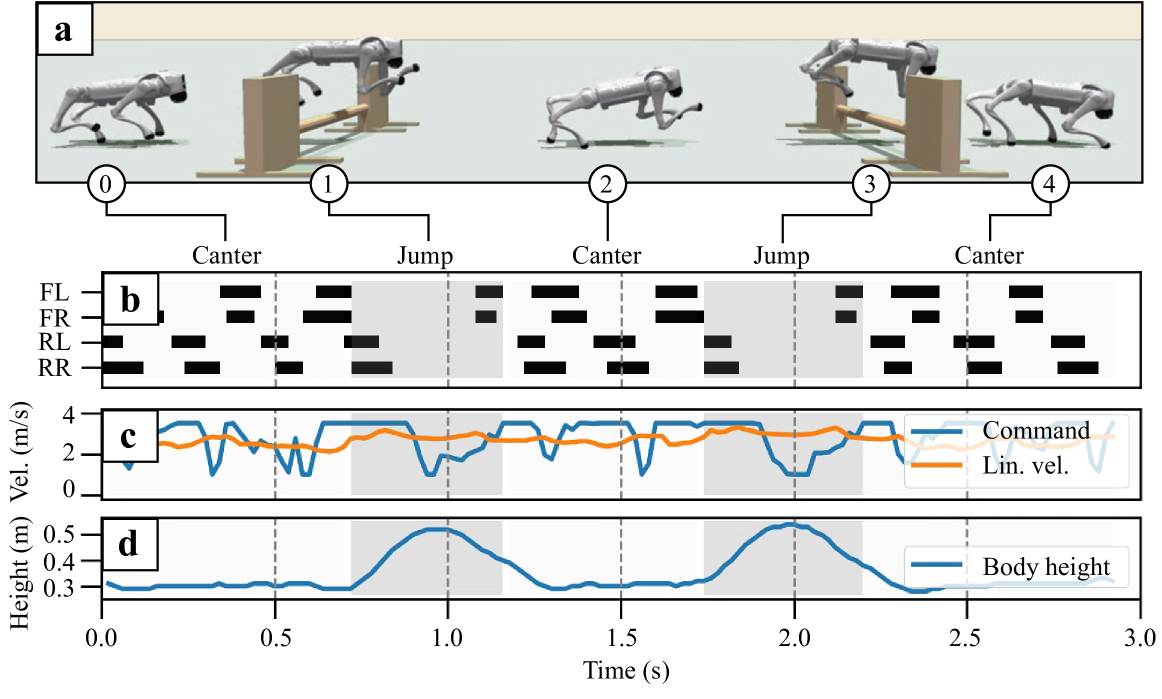
- 实验表明,机器人能够完成四足敏捷挑战,平均速度1.1m/s,峰值速度3.2m/s,显著提升敏捷性。
📝 摘要(中文)
本文提出了一种集成控制器,包含基础行为控制器(BBC)和任务特定控制器(TSC),旨在提升四足机器人的敏捷性,使其能够学习并复现更广泛的自然行为。BBC采用一种新颖的半监督生成对抗模仿学习算法,从真实犬类的原始运动捕捉数据中提取多样化的行为风格,并通过调整离散和连续的潜在变量输入实现平滑的行为过渡。TSC通过特权学习进行训练,以深度图像作为输入,协调BBC高效地执行各种任务。此外,采用进化对抗模拟器识别来优化模拟器,使其与现实环境更加一致。实验结果表明,训练后的机器人在四足敏捷挑战中表现出多样化的自然行为,平均速度达到1.1米/秒,跨越障碍时的峰值速度达到3.2米/秒。这项工作是四足机器人实现类动物敏捷性的一大步,为其在日益复杂的现实环境中部署开辟了道路。
🔬 方法详解
问题定义:现有四足机器人研究主要集中于模仿特定行为,缺乏在真实环境中复现动物般多样化自然行为的能力。痛点在于难以从真实动物的复杂运动数据中提取通用的行为模式,并且难以将模拟环境训练的策略迁移到真实世界中。
核心思路:本文的核心思路是将控制器的设计分解为两个部分:基础行为控制器(BBC)负责生成多样化的自然行为,任务特定控制器(TSC)负责根据任务需求协调BBC。通过这种解耦,可以分别优化行为生成和任务执行,从而提高机器人的整体性能。此外,使用半监督生成对抗模仿学习来提取行为,并使用进化对抗模拟器识别来提高模拟器与真实世界的相似度。
技术框架:整体框架包含三个主要部分:1) 使用半监督生成对抗模仿学习训练BBC,使其能够生成多样化的自然行为;2) 使用特权学习训练TSC,使其能够根据任务需求协调BBC;3) 使用进化对抗模拟器识别来优化模拟器,提高策略的迁移能力。BBC接收离散和连续的潜在变量作为输入,输出关节控制指令。TSC接收深度图像作为输入,输出对BBC潜在变量的控制信号。
关键创新:本文的关键创新在于:1) 提出了一种半监督生成对抗模仿学习算法,能够从真实动物的运动捕捉数据中提取多样化的行为风格;2) 提出了一种集成控制器,将行为生成和任务执行解耦,提高了机器人的整体性能;3) 使用进化对抗模拟器识别来优化模拟器,提高了策略的迁移能力。
关键设计:BBC使用生成对抗网络(GAN)结构,生成器负责生成行为,判别器负责区分生成的行为和真实的行为。损失函数包括对抗损失、重构损失和多样性损失。TSC使用深度神经网络,输入为深度图像,输出为对BBC潜在变量的控制信号。特权信息包括机器人的状态信息。进化对抗模拟器识别使用进化算法来优化模拟器的参数,目标是使模拟器中的机器人行为与真实世界中的机器人行为尽可能相似。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够使四足机器人在四足敏捷挑战中表现出多样化的自然行为,平均速度达到1.1米/秒,跨越障碍时的峰值速度达到3.2米/秒。这些结果表明,该方法能够有效地提高四足机器人的敏捷性和适应能力,使其能够在复杂环境中执行各种任务。
🎯 应用场景
该研究成果可应用于搜救、勘探、巡检等复杂环境下的四足机器人任务。通过学习多样化的自然行为,机器人能够更好地适应复杂地形和障碍物,提高任务完成效率和安全性。未来,该技术有望应用于更广泛的机器人领域,例如人形机器人、服务机器人等,提升机器人的智能化水平和适应能力。
📄 摘要(原文)
Achieving animal-like agility is a longstanding goal in quadrupedal robotics. While recent studies have successfully demonstrated imitation of specific behaviors, enabling robots to replicate a broader range of natural behaviors in real-world environments remains an open challenge. Here we propose an integrated controller comprising a Basic Behavior Controller (BBC) and a Task-Specific Controller (TSC) which can effectively learn diverse natural quadrupedal behaviors in an enhanced simulator and efficiently transfer them to the real world. Specifically, the BBC is trained using a novel semi-supervised generative adversarial imitation learning algorithm to extract diverse behavioral styles from raw motion capture data of real dogs, enabling smooth behavior transitions by adjusting discrete and continuous latent variable inputs. The TSC, trained via privileged learning with depth images as input, coordinates the BBC to efficiently perform various tasks. Additionally, we employ evolutionary adversarial simulator identification to optimize the simulator, aligning it closely with reality. After training, the robot exhibits diverse natural behaviors, successfully completing the quadrupedal agility challenge at an average speed of 1.1 m/s and achieving a peak speed of 3.2 m/s during hurdling. This work represents a substantial step toward animal-like agility in quadrupedal robots, opening avenues for their deployment in increasingly complex real-world environments.