Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust Grasping
作者: Michael Burgess, Edward H. Adelson
分类: cs.RO
发布日期: 2025-05-14 (更新: 2025-07-30)
💡 一句话要点
提出GET:一种具有触觉传感的单自由度三指夹爪,用于稳健抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人夹爪 触觉传感 稳健抓取 单自由度 三指夹爪 自相似性 遥操作
📋 核心要点
- 现有夹爪在抓取不同形状和尺寸物体时存在局限性,难以同时保证适应性和抓取力。
- GET夹爪采用V形三指设计,利用自相似性原理,提升了对不同尺寸和形状物体的抓取能力。
- 实验表明,GET夹爪在抓取任务中优于传统扁平手指,并集成了触觉传感以估计法向力。
📝 摘要(中文)
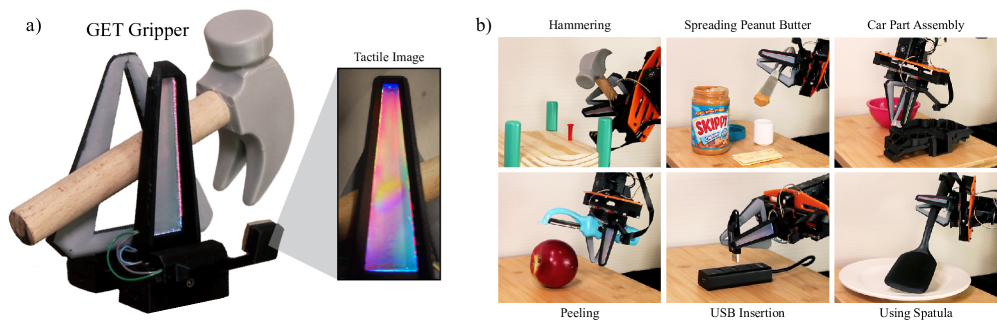
本文介绍了一种名为Grasp EveryThing (GET) 的新型夹爪,它采用单自由度、三指设计,能够安全地抓取各种形状和大小的物体。该设计安装在标准的平行爪驱动器上,具有三个细长的锥形手指,以二对一的方式排列,其中两个手指汇聚成V形。与传统的两个扁平手指的设计相比,GET夹爪更能适应物体几何形状并形成牢固的抓握。受自相似性原则的启发,这些V形手指能够安全地抓取各种尺寸的物体。此外,这些手指经过参数化设计,便于在具有平行爪夹爪的机器人上调整尺寸和互换。此外,我们还加入了一个刚性的指甲,方便操作小物体。触觉传感可以通过外部安装的摄像头集成到独立的手指中。训练了一个神经网络来估计触觉图像中的法向力,在各种几何形状上的平均验证误差为1.3 N。在遥操作抓取15个物体并执行3个任务时,GET手指始终优于标准扁平手指。所有手指设计,与多种机器人形态兼容,包括包含和不包含触觉传感的设计,都可以在GitHub上找到。
🔬 方法详解
问题定义:现有机器人夹爪在处理多样化的物体时,常常面临适应性和抓取稳定性的挑战。传统的双指夹爪难以适应复杂几何形状,而多指夹爪则通常结构复杂、控制难度高。因此,需要一种简单、稳健且能适应多种物体形状和尺寸的夹爪设计。
核心思路:GET夹爪的核心思路是利用单自由度驱动的三指结构,结合V形手指的自相似性,实现对不同尺寸和形状物体的稳健抓取。V形手指的设计使得夹爪能够更好地贴合物体表面,增加接触面积,从而提高抓取力和稳定性。单自由度驱动简化了控制,降低了成本。
技术框架:GET夹爪主要由以下几个部分组成:1) 标准的平行爪驱动器;2) 三个锥形V形手指,以二对一的方式排列;3) 可选的刚性指甲,用于操作小物体;4) 可选的触觉传感系统,通过外部摄像头获取触觉图像。整个系统通过平行爪驱动器控制手指的开合,实现抓取动作。触觉传感系统则用于估计抓取过程中的法向力。
关键创新:GET夹爪的关键创新在于其独特的V形三指结构和自相似性设计。V形手指能够更好地适应物体表面,提供更大的接触面积和更稳定的抓取力。自相似性设计使得夹爪能够有效地抓取不同尺寸的物体。此外,集成的触觉传感系统能够提供实时的抓取力反馈,进一步提高抓取的可靠性。
关键设计:V形手指的锥度、长度和材料是关键的设计参数。锥度决定了手指对不同形状物体的适应能力,长度决定了夹爪的抓取范围,材料则影响了夹爪的抓取力和耐用性。触觉传感系统采用外部摄像头获取触觉图像,并通过训练神经网络来估计法向力。神经网络的结构和训练数据是影响触觉传感性能的关键因素。论文中报告了1.3N的平均验证误差。
🖼️ 关键图片


📊 实验亮点
实验结果表明,GET夹爪在抓取15个不同物体并执行3个遥操作任务时,性能始终优于标准扁平手指。触觉传感系统能够以平均1.3 N的验证误差估计法向力,为抓取控制提供了有价值的反馈信息。所有手指设计,包括包含和不包含触觉传感的版本,均已在GitHub上开源。
🎯 应用场景
GET夹爪可应用于各种机器人抓取任务,例如:工业自动化中的零件抓取、物流领域的货物分拣、家庭服务机器人中的物品拾取等。其简单、稳健的设计使其易于集成到各种机器人平台中,并能有效提高抓取任务的效率和可靠性。未来,结合更先进的触觉传感和控制算法,GET夹爪有望实现更复杂、更精细的抓取操作。
📄 摘要(原文)
We introduce the Grasp EveryThing (GET) gripper, a novel 1-DoF, 3-finger design for securely grasping objects of many shapes and sizes. Mounted on a standard parallel jaw actuator, the design features three narrow, tapered fingers arranged in a two-against-one configuration, where the two fingers converge into a V-shape. The GET gripper is more capable of conforming to object geometries and forming secure grasps than traditional designs with two flat fingers. Inspired by the principle of self-similarity, these V-shaped fingers enable secure grasping across a wide range of object sizes. Further to this end, fingers are parametrically designed for convenient resizing and interchangeability across robotic embodiments with a parallel jaw gripper. Additionally, we incorporate a rigid fingernail for ease in manipulating small objects. Tactile sensing can be integrated into the standalone finger via an externally-mounted camera. A neural network was trained to estimate normal force from tactile images with an average validation error of 1.3 N across a diverse set of geometries. In grasping 15 objects and performing 3 tasks via teleoperation, the GET fingers consistently outperformed standard flat fingers. All finger designs, compatible with multiple robotic embodiments, both incorporating and lacking tactile sensing, are available on GitHub.