Strategic Jenga Play via Graph Based Dynamics Modeling
作者: Kavya Puthuveetil, Xinyi Zhang, Kazuto Yokoyama, Tetsuya Narita
分类: cs.RO
发布日期: 2025-05-14
备注: 5 pages, Oral Spotlight at ICRA 2025 Workshop "Learning Meets Model-Based Methods for Contact-Rich Manipulation"
💡 一句话要点
提出基于图结构的动力学建模方法,用于Jenga游戏中积木的策略性操作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Jenga游戏 机器人操作 图神经网络 动力学建模 模型预测控制
📋 核心要点
- 现有方法难以处理Jenga游戏中积木间复杂的动力学关系,导致操作策略制定困难。
- 论文提出基于图的动力学建模方法,分别用于积木选择和积木抽取两个任务。
- 在模拟环境中验证了该方法,即使在游戏后期,也能有效地选择和抽取积木。
📝 摘要(中文)
在接触丰富的操作中,精确控制多个动力学紧密耦合的物体是一个具有挑战性的问题,需要理解一个物体的运动如何影响其他物体。本文以Jenga游戏为实验平台,利用基于图的建模方法解决该任务的两个不同方面:1)积木选择和2)积木抽取。对于积木选择,我们构建Jenga塔的图,并尝试基于塔的结构来分类移除特定积木是否会导致塔倒塌。对于积木抽取,我们训练一个动力学模型,预测塔中所有积木在抽取轨迹的每个时间步的运动情况,然后将其用于基于采样的模型预测控制循环中,以使用通用平行爪夹具安全地从塔中拉出积木。我们在模拟中训练和评估我们的方法,在具有挑战性的全尺寸Jenga塔上,即使在游戏的高级阶段,也展示了在积木选择和积木抽取方面有希望的结果。
🔬 方法详解
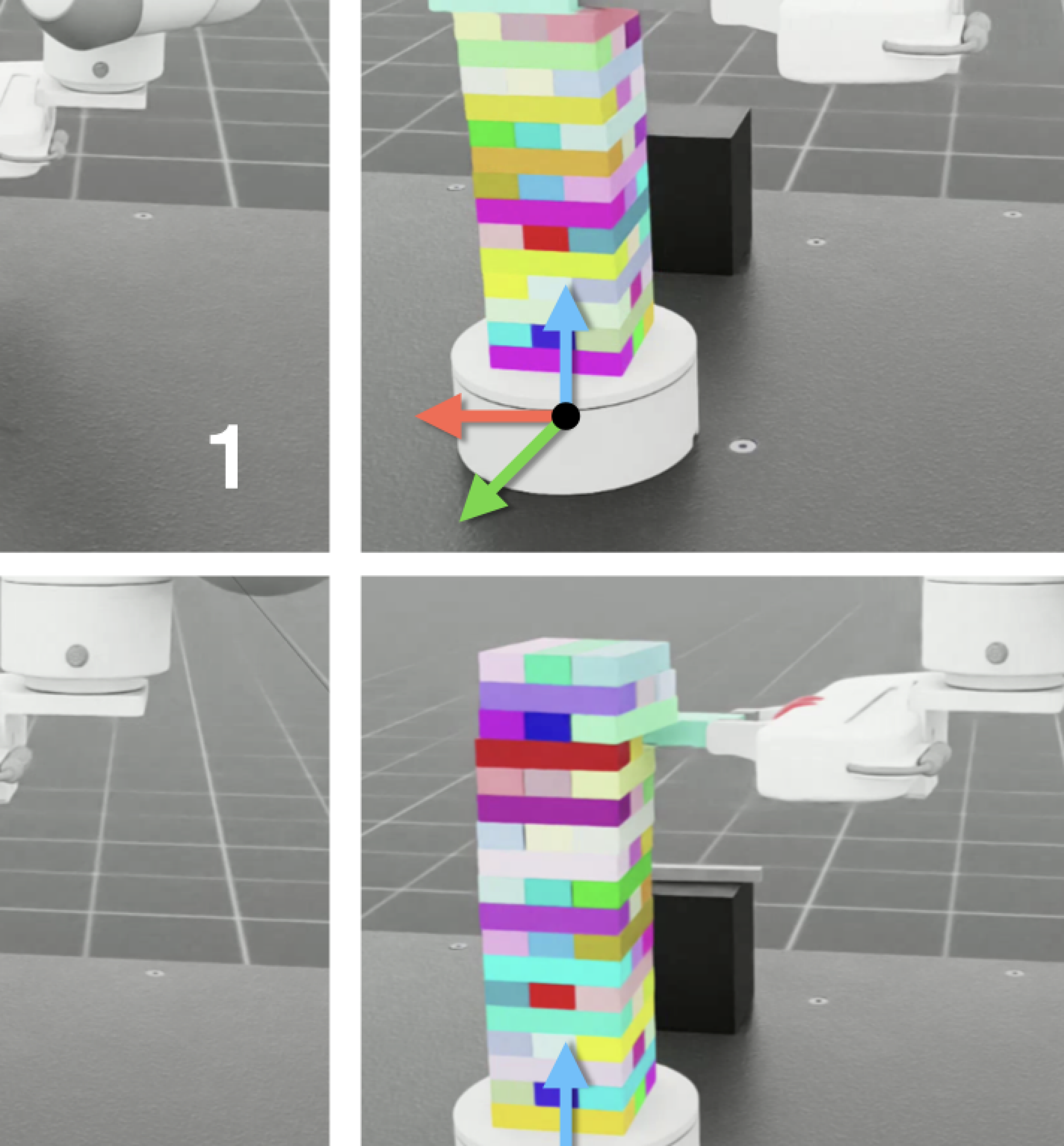
问题定义:Jenga游戏中的策略性积木操作,包括选择合适的积木以及安全地将其抽取出来。现有方法难以准确预测积木之间的相互作用,尤其是在塔结构变得不稳定时,导致操作失败率高。
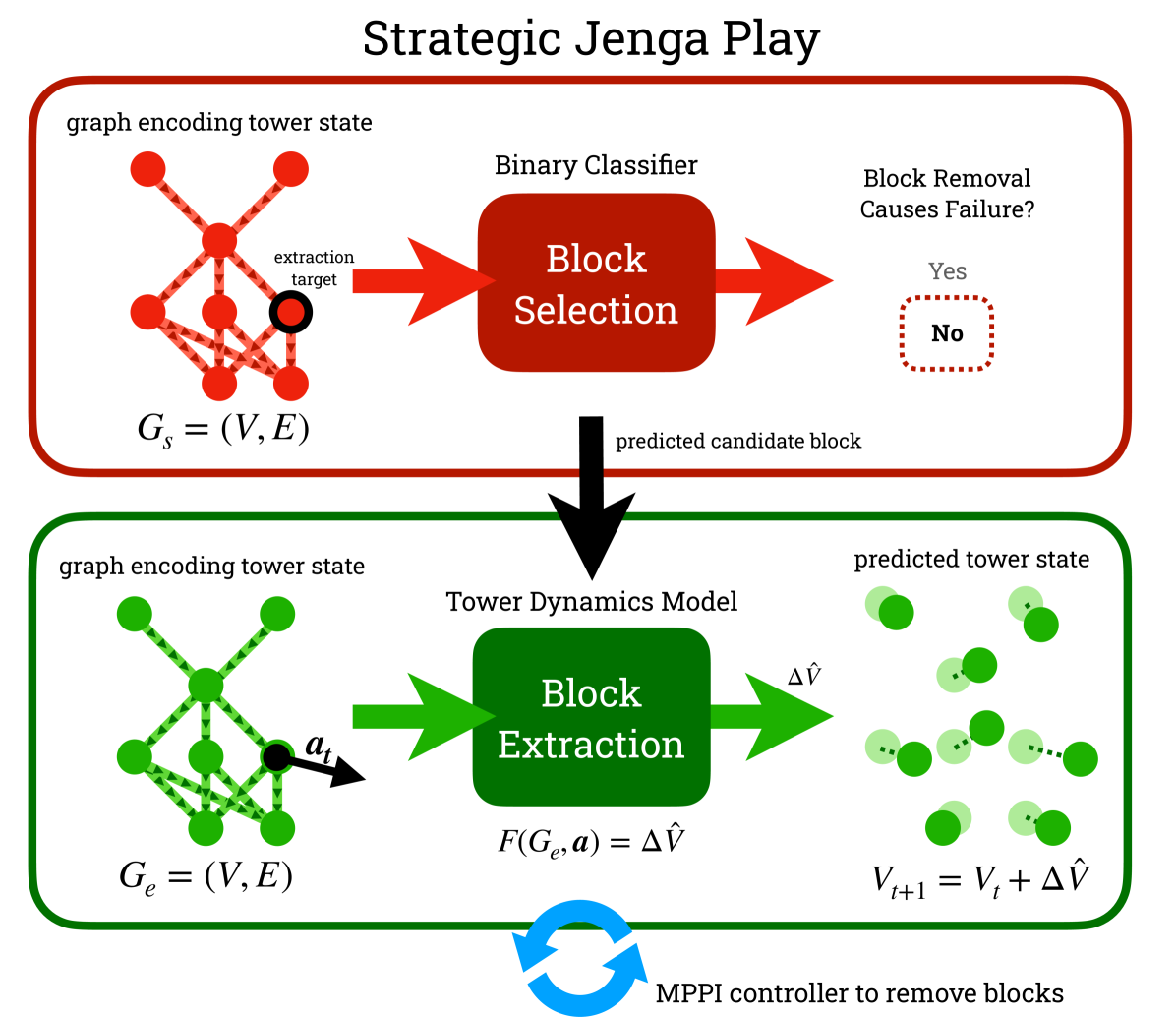
核心思路:将Jenga塔建模成图结构,利用图的结构信息进行积木选择,并训练动力学模型预测积木抽取过程中的运动轨迹。通过模型预测控制,实现安全可靠的积木抽取。
技术框架:整体流程分为两个主要模块:积木选择和积木抽取。积木选择模块构建Jenga塔的图结构,并基于图的特征预测移除积木是否会导致塔倒塌。积木抽取模块训练动力学模型,预测积木在抽取过程中的运动轨迹,并将其嵌入到模型预测控制循环中,控制机械臂安全地抽取积木。
关键创新:将图结构引入到Jenga塔的建模中,能够有效地捕捉积木之间的依赖关系。利用动力学模型预测抽取过程,避免了直接进行物理交互带来的风险。将积木选择和积木抽取两个任务结合起来,形成完整的操作流程。
关键设计:积木选择模块使用图神经网络进行分类,判断移除积木的安全性。动力学模型采用循环神经网络(RNN)结构,预测每个时间步的积木运动状态。模型预测控制循环使用采样方法生成候选轨迹,并根据动力学模型的预测结果选择最优轨迹。
🖼️ 关键图片
📊 实验亮点
在模拟实验中,该方法在全尺寸Jenga塔上取得了显著的成果,即使在游戏后期,也能有效地选择和抽取积木。实验结果表明,该方法能够准确预测积木的运动轨迹,并安全地完成抽取任务。具体性能数据未知。
🎯 应用场景
该研究提出的方法可以应用于其他多物体操作任务,例如装配、拆卸等。通过学习物体之间的动力学关系,可以实现更安全、更高效的机器人操作。此外,该方法还可以应用于虚拟环境中的物理仿真,提高仿真的真实性和可靠性。
📄 摘要(原文)
Controlled manipulation of multiple objects whose dynamics are closely linked is a challenging problem within contact-rich manipulation, requiring an understanding of how the movement of one will impact the others. Using the Jenga game as a testbed to explore this problem, we graph-based modeling to tackle two different aspects of the task: 1) block selection and 2) block extraction. For block selection, we construct graphs of the Jenga tower and attempt to classify, based on the tower's structure, whether removing a given block will cause the tower to collapse. For block extraction, we train a dynamics model that predicts how all the blocks in the tower will move at each timestep in an extraction trajectory, which we then use in a sampling-based model predictive control loop to safely pull blocks out of the tower with a general-purpose parallel-jaw gripper. We train and evaluate our methods in simulation, demonstrating promising results towards block selection and block extraction on a challenging set of full-sized Jenga towers, even at advanced stages of the game.