Neural Network Aided Kalman Filtering with Model Predictive Control Enables Robot-Assisted Drone Recovery on a Wavy Surface
作者: Yimou Wu, Mingyang Liang, Chongfeng Liu, Zhongzhong Cao, Huihuan Qian
分类: cs.RO, eess.SY
发布日期: 2025-05-14 (更新: 2025-11-04)
备注: 17 pages, 51 figures
💡 一句话要点
提出基于神经网络辅助卡尔曼滤波与模型预测控制的水面无人机回收方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机回收 水面机器人 卡尔曼滤波 模型预测控制 神经网络 机器人控制 运动规划
📋 核心要点
- 现有方法难以准确预测波浪扰动下无人机位置,影响水面回收成功率。
- 提出 KalmanNet++ 预测无人机位置,结合 RHMPC 为机械臂规划捕获轨迹。
- 实验结果表明,该方法回收成功率高于 95%,效率和精度均优于传统方法。
📝 摘要(中文)
本文提出了一种统一的框架,用于在波浪干扰水面上进行机器人辅助无人机回收,解决了两个主要任务:首先,使用我们提出的神经网络辅助卡尔曼滤波 KalmanNet++,精确预测波浪扰动下移动无人机的位置。其次,通过后退水平线模型预测控制(RHMPC),利用预测位置为机械臂规划有效的运动轨迹。具体而言,我们比较了多种预测方法,并提出 KalmanNet++ 来预测无人机的位置,从而获得期望位置。KalmanNet++ 预测无人机未来 0.1 秒的位置,同时机械臂实时规划捕获轨迹,从而克服了波浪引起的基座运动以及扭矩约束和关节约束等限制。系统设计上,我们提供了一个包含机械臂子系统和无人机子系统的协作系统,实现无人机吊装和回收。使用波浪扰动运动数据的仿真和真实实验表明,我们的方法实现了较高的成功率(高于 95%),并且在效率方面优于传统基线方法高达 10%,在精度方面优于 20%。结果强调了我们系统的可行性和鲁棒性,该系统实现了最先进的性能,并为海上无人机操作提供了实用的解决方案。
🔬 方法详解
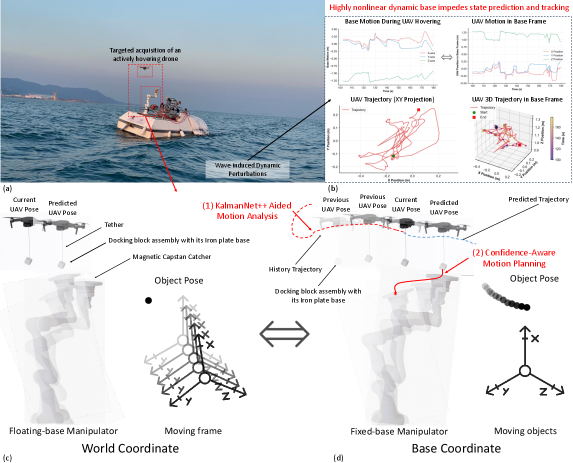
问题定义:论文旨在解决在波浪扰动的水面上,机器人辅助回收无人机的难题。现有方法难以准确预测无人机在复杂水面环境下的运动轨迹,导致机械臂无法有效捕获无人机,回收成功率低。此外,机械臂的运动还受到自身扭矩和关节约束的限制,进一步增加了回收的难度。
核心思路:论文的核心思路是结合神经网络辅助的卡尔曼滤波(KalmanNet++)进行无人机位置预测,并利用后退水平线模型预测控制(RHMPC)为机械臂规划最优运动轨迹。KalmanNet++ 能够学习并预测无人机在波浪扰动下的运动规律,提供准确的未来位置信息。RHMPC 则根据预测的位置信息,实时规划机械臂的运动,克服波浪扰动和自身约束,实现精确捕获。
技术框架:该方案包含两个主要模块:无人机位置预测模块和机械臂运动规划模块。无人机位置预测模块使用 KalmanNet++ 预测无人机未来 0.1 秒的位置。机械臂运动规划模块使用 RHMPC,根据 KalmanNet++ 的预测结果,实时规划机械臂的捕获轨迹。整个系统通过协作,实现无人机的吊装和回收。
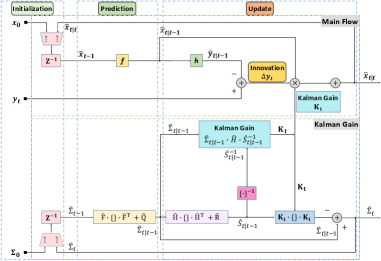
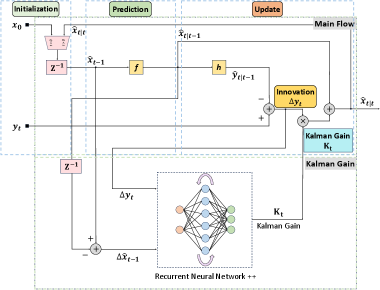
关键创新:论文的关键创新在于提出了 KalmanNet++,一种神经网络辅助的卡尔曼滤波方法。与传统的卡尔曼滤波相比,KalmanNet++ 能够学习并利用数据中的非线性关系,更准确地预测无人机在复杂环境下的运动轨迹。此外,结合 RHMPC 实现了机械臂的实时运动规划,克服了波浪扰动和自身约束,提高了回收的成功率。
关键设计:KalmanNet++ 的具体网络结构未知,但其核心思想是利用神经网络学习卡尔曼滤波中的某些参数或过程,从而提高滤波的精度和鲁棒性。RHMPC 的关键设计在于选择合适的代价函数,以平衡机械臂的运动速度、精度和能量消耗。此外,还需要考虑机械臂的扭矩约束和关节约束,确保运动规划的可行性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在波浪扰动环境下实现了高于 95% 的无人机回收成功率,并且在效率方面优于传统基线方法高达 10%,在精度方面优于 20%。这些数据表明,该方法具有较高的鲁棒性和实用性,能够有效解决水面无人机回收的难题。
🎯 应用场景
该研究成果可应用于海上无人机作业,例如海洋环境监测、海上搜救、海上风电巡检等。通过机器人辅助无人机回收,可以提高无人机作业的效率和安全性,降低人工成本。未来,该技术还可以扩展到其他复杂环境下的无人机回收任务,例如山区、丛林等。
📄 摘要(原文)
Recovering a drone on a disturbed water surface remains a significant challenge in maritime robotics. In this paper, we propose a unified framework for robot-assisted drone recovery on a wavy surface that addresses two major tasks: Firstly, accurate prediction of a moving drone's position under wave-induced disturbances using KalmanNet Plus Plus (KalmanNet++), a Neural Network Aided Kalman Filtering we proposed. Secondly, effective motion planning using the desired position we got for a manipulator via Receding Horizon Model Predictive Control (RHMPC). Specifically, we compared multiple prediction methods and proposed KalmanNet Plus Plus to predict the position of the UAV, thereby obtaining the desired position. The KalmanNet++ predicts the drone's future position 0.1\,s ahead, while the manipulator plans a capture trajectory in real time, thus overcoming not only wave-induced base motions but also limited constraints such as torque constraints and joint constraints. For the system design, we provide a collaborative system, comprising a manipulator subsystem and a UAV subsystem, enables drone lifting and drone recovery. Simulation and real-world experiments using wave-disturbed motion data demonstrate that our approach achieves a high success rate - above 95\% and outperforms conventional baseline methods by up to 10\% in efficiency and 20\% in precision. The results underscore the feasibility and robustness of our system, which achieves state-of-the-art performance and offers a practical solution for maritime drone operations.