Motion Control of High-Dimensional Musculoskeletal Systems with Hierarchical Model-Based Planning
作者: Yunyue Wei, Shanning Zhuang, Vincent Zhuang, Yanan Sui
分类: cs.RO
发布日期: 2025-05-13
备注: Accepted by ICLR 2025
💡 一句话要点
提出MPC^2算法,用于高维肌肉骨骼系统的零样本近实时运动控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模型预测控制 肌肉骨骼系统 运动控制 层级控制 形态感知 零样本学习 黑盒优化
📋 核心要点
- 高维非线性系统的控制因其巨大的状态和动作空间而极具挑战,传统深度强化学习方法计算成本高昂且需要大量人工调参。
- 论文提出MPC^2算法,结合模型预测控制和形态感知比例控制,实现对高维复杂动力系统的零样本和近实时控制。
- 实验表明,MPC^2算法能够有效控制高维人体肌肉骨骼模型完成多种运动任务,并可通过黑盒优化减少人工奖励工程的需求。
📝 摘要(中文)
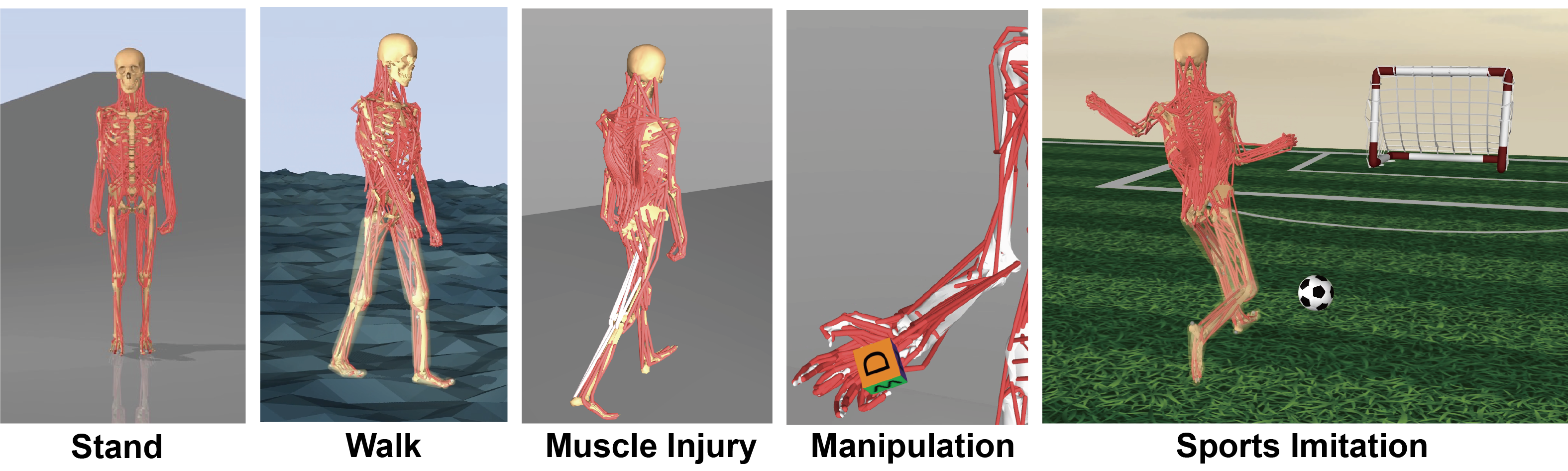
控制高维非线性系统(如生物和机器人应用中的系统)极具挑战性,原因在于其巨大的状态空间和动作空间。深度强化学习在这些领域取得了一些成功,但计算密集且耗时,因此不适合解决需要大量手动调整的大量任务。本文介绍了一种基于模型的层级学习算法,即具有形态感知比例控制的模型预测控制(MPC^2),用于高维复杂动力系统的零样本和近实时控制。MPC^2使用基于采样的模型预测控制器进行目标姿势规划,并通过结合用于执行器协调的形态感知比例控制器,实现对高维任务的鲁棒控制。该算法能够控制高维人体肌肉骨骼模型执行各种运动任务,如站立、在不同地形上行走以及模仿体育活动。MPC^2的奖励函数可以通过黑盒优化进行调整,从而大大减少了对人工密集型奖励工程的需求。
🔬 方法详解
问题定义:论文旨在解决高维肌肉骨骼系统运动控制问题。现有方法,特别是深度强化学习,虽然在某些任务上表现出色,但计算成本高,需要大量训练数据,并且对奖励函数的设计非常敏感,需要大量人工调整。这使得它们难以应用于需要快速适应和泛化到新任务的场景。
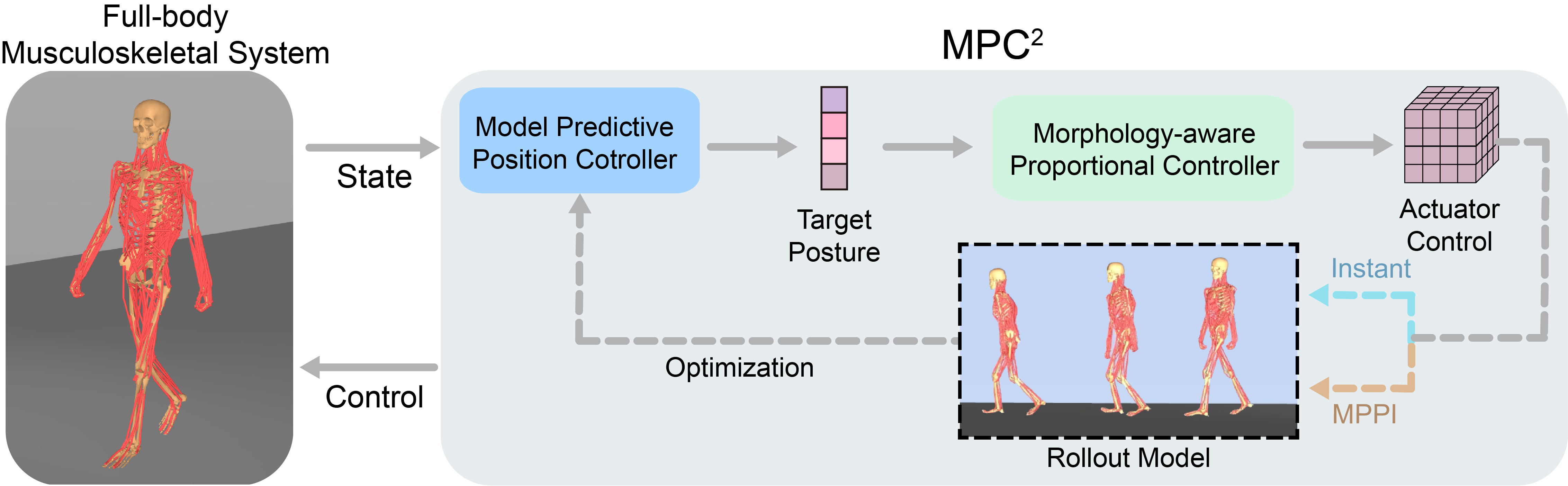
核心思路:论文的核心思路是将模型预测控制(MPC)与形态感知比例控制相结合,形成一个层级控制框架。MPC负责规划目标姿势,而形态感知比例控制负责协调各个执行器的动作,从而实现对高维系统的鲁棒控制。这种分层结构降低了问题的复杂度,并允许算法在近实时条件下运行。
技术框架:MPC^2算法的整体框架包含两个主要模块:1) 基于采样的模型预测控制器:该模块使用动力学模型预测未来状态,并选择能够达到期望目标姿势的动作序列。2) 形态感知比例控制器:该模块根据当前状态和目标姿势,计算每个执行器的控制信号。该控制器考虑了系统的形态结构,从而实现更有效的协调。
关键创新:MPC^2的关键创新在于将模型预测控制与形态感知比例控制相结合,形成一个层级控制框架。这种框架能够有效地处理高维系统的复杂性,并实现零样本和近实时控制。此外,该算法还采用黑盒优化方法来调整奖励函数,从而减少了对人工奖励工程的需求。
关键设计:MPC模块使用采样方法生成候选轨迹,并使用动力学模型评估这些轨迹的成本。形态感知比例控制器的设计考虑了肌肉骨骼系统的结构,例如肌肉的附着点和关节的运动范围。奖励函数的设计旨在鼓励系统达到期望的目标姿势,同时避免不自然的动作。黑盒优化算法用于自动调整奖励函数的参数。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了MPC^2算法在控制高维人体肌肉骨骼模型执行各种运动任务方面的有效性,包括站立、在不同地形上行走以及模仿体育活动。实验结果表明,该算法能够在近实时条件下生成自然的运动轨迹,并且可以通过黑盒优化自动调整奖励函数,减少人工干预。与传统的深度强化学习方法相比,MPC^2算法具有更高的效率和更好的泛化能力。
🎯 应用场景
该研究成果可应用于生物力学仿真、康复机器人、虚拟现实角色控制等领域。通过该算法,可以更高效地控制高维复杂系统,模拟生物体的运动行为,并为康复训练提供更精确的控制策略。未来,该技术有望应用于开发更智能、更灵活的机器人系统,以及更逼真的虚拟现实体验。
📄 摘要(原文)
Controlling high-dimensional nonlinear systems, such as those found in biological and robotic applications, is challenging due to large state and action spaces. While deep reinforcement learning has achieved a number of successes in these domains, it is computationally intensive and time consuming, and therefore not suitable for solving large collections of tasks that require significant manual tuning. In this work, we introduce Model Predictive Control with Morphology-aware Proportional Control (MPC^2), a hierarchical model-based learning algorithm for zero-shot and near-real-time control of high-dimensional complex dynamical systems. MPC^2 uses a sampling-based model predictive controller for target posture planning, and enables robust control for high-dimensional tasks by incorporating a morphology-aware proportional controller for actuator coordination. The algorithm enables motion control of a high-dimensional human musculoskeletal model in a variety of motion tasks, such as standing, walking on different terrains, and imitating sports activities. The reward function of MPC^2 can be tuned via black-box optimization, drastically reducing the need for human-intensive reward engineering.