Neural Brain: A Neuroscience-inspired Framework for Embodied Agents
作者: Jian Liu, Xiongtao Shi, Thai Duy Nguyen, Haitian Zhang, Tianxiang Zhang, Wei Sun, Yanjie Li, Athanasios V. Vasilakos, Giovanni Iacca, Arshad Ali Khan, Arvind Kumar, Jae Won Cho, Ajmal Mian, Lihua Xie, Erik Cambria, Lin Wang
分类: cs.RO, cs.AI, cs.CV
发布日期: 2025-05-12 (更新: 2025-10-06)
备注: 51 pages, 17 figures, 9 tables
💡 一句话要点
提出神经脑框架,用于驱动具身智能体实现类人适应性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 神经脑 多模态感知 神经可塑性 神经形态计算
📋 核心要点
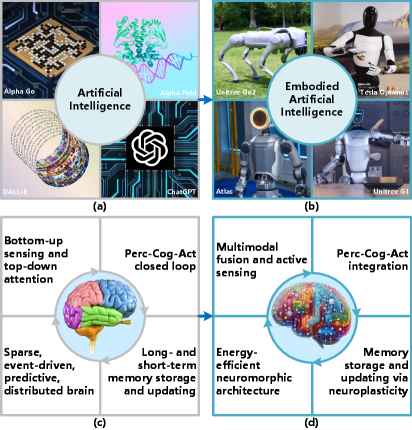
- 现有AI系统缺乏与真实世界交互的能力,无法像人类一样适应和操纵环境,限制了其在具身智能领域的应用。
- 论文提出了一种受神经科学启发的神经脑框架,旨在为具身智能体提供类似人类的感知、认知和行动能力。
- 该框架集成了多模态感知、认知-行动功能、神经可塑性记忆和神经形态硬件优化,旨在弥合AI与人类智能的差距。
📝 摘要(中文)
人工智能的快速发展已从静态的、数据驱动的模型转向能够感知并与真实世界环境交互的动态系统。尽管在模式识别和符号推理方面取得了进展,但当前的人工智能系统,如大型语言模型,仍然是无实体的,无法在物理上与世界互动。这种局限性推动了具身智能的兴起,其中自主智能体,如人形机器人,必须以类似人类的适应性来导航和操纵非结构化环境。这项挑战的核心在于神经脑的概念,这是一种旨在驱动具有类人适应性的具身智能体的中央智能系统。神经脑必须无缝地将多模态传感和感知与认知能力相结合。实现这一点还需要一个自适应的记忆系统和节能的软硬件协同设计,从而能够在动态环境中进行实时动作。本文介绍了一个用于具身智能体的神经脑的统一框架,解决了两个基本挑战:(1) 定义神经脑的核心组件;(2) 弥合静态人工智能模型与真实世界部署所需的动态适应性之间的差距。为此,我们提出了一种受生物学启发的架构,该架构集成了多模态主动感知、感知-认知-行动功能、基于神经可塑性的记忆存储和更新以及神经形态硬件/软件优化。此外,我们还回顾了关于具身智能体的最新研究,并分析了当前人工智能系统与人类智能之间的差距。通过综合神经科学的见解,我们概述了一个开发通用、自主智能体的路线图,这些智能体能够在真实场景中实现人类水平的智能。
🔬 方法详解
问题定义:论文旨在解决具身智能体缺乏类人适应性的问题。现有AI模型,特别是大型语言模型,虽然在模式识别和符号推理方面表现出色,但无法在物理世界中进行交互。这限制了它们在需要自主导航和操纵环境的任务中的应用。现有方法难以将多模态感知、认知和行动有效整合,并且缺乏自适应记忆和节能硬件设计,无法满足实时动态环境的需求。
核心思路:论文的核心思路是借鉴神经科学的原理,构建一个类似于人脑的“神经脑”框架,用于驱动具身智能体。该框架旨在模拟人脑的多模态感知、认知、记忆和行动机制,从而使智能体能够像人类一样适应和响应复杂环境。通过模仿生物神经系统的结构和功能,该框架有望克服现有AI系统在具身智能方面的局限性。
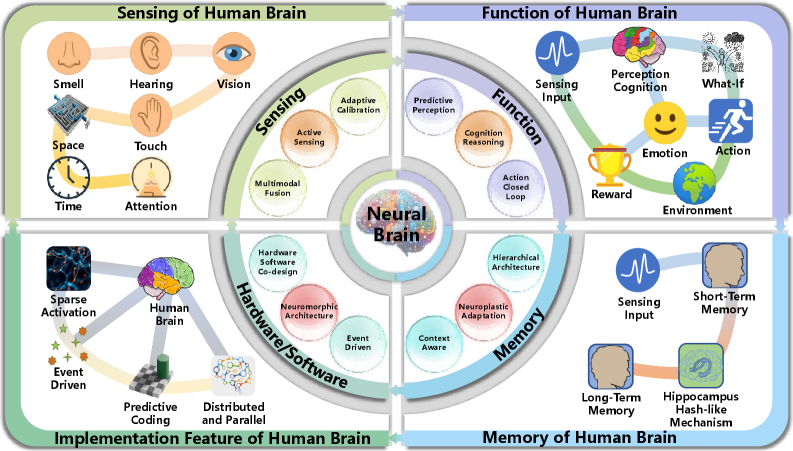
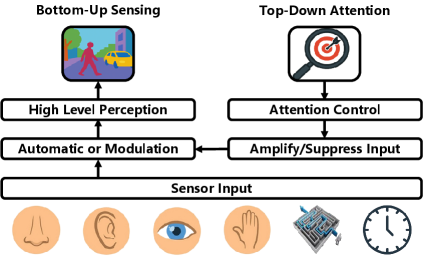
技术框架:该神经脑框架包含四个主要组成部分:1) 多模态主动感知:负责从环境中获取多模态信息,如视觉、听觉和触觉。2) 感知-认知-行动功能:将感知到的信息进行处理和理解,并生成相应的行动指令。3) 基于神经可塑性的记忆存储和更新:用于存储和更新智能体的经验和知识,使其能够随着时间的推移不断学习和适应。4) 神经形态硬件/软件优化:旨在提高框架的能效和实时性,使其能够在资源受限的硬件平台上运行。
关键创新:该论文的关键创新在于提出了一个统一的、受神经科学启发的框架,用于构建具身智能体的神经脑。该框架整合了多模态感知、认知、记忆和行动等多个方面,并强调了神经可塑性和神经形态硬件的重要性。与现有方法相比,该框架更注重模拟人脑的结构和功能,从而有望实现更高级别的具身智能。
关键设计:论文中没有详细说明具体的参数设置、损失函数或网络结构等技术细节。然而,论文强调了神经可塑性在记忆存储和更新中的作用,这可能涉及到使用基于神经可塑性的学习算法,如STDP(Spike-Timing-Dependent Plasticity)。此外,论文还提到了神经形态硬件/软件优化,这可能涉及到使用脉冲神经网络(SNN)等技术来提高能效和实时性。具体的实现细节需要进一步的研究和开发。
🖼️ 关键图片
📊 实验亮点
由于该论文主要提出了一个框架性的概念,并没有提供具体的实验结果。因此,无法总结具体的性能数据、对比基线或提升幅度。论文的主要贡献在于提出了神经脑的概念和框架,并概述了未来研究的方向。
🎯 应用场景
该研究成果可应用于各种需要自主导航和操纵环境的领域,如机器人、自动驾驶、智能家居、医疗保健等。例如,可以用于开发能够自主完成复杂任务的机器人,或者用于构建能够根据环境变化自动调整的智能系统。该研究有望推动具身智能的发展,并为实现更智能、更人性化的AI系统奠定基础。
📄 摘要(原文)
The rapid evolution of artificial intelligence (AI) has shifted from static, data-driven models to dynamic systems capable of perceiving and interacting with real-world environments. Despite advancements in pattern recognition and symbolic reasoning, current AI systems, such as large language models, remain disembodied, unable to physically engage with the world. This limitation has driven the rise of embodied AI, where autonomous agents, such as humanoid robots, must navigate and manipulate unstructured environments with human-like adaptability. At the core of this challenge lies the concept of Neural Brain, a central intelligence system designed to drive embodied agents with human-like adaptability. A Neural Brain must seamlessly integrate multimodal sensing and perception with cognitive capabilities. Achieving this also requires an adaptive memory system and energy-efficient hardware-software co-design, enabling real-time action in dynamic environments. This paper introduces a unified framework for the Neural Brain of embodied agents, addressing two fundamental challenges: (1) defining the core components of Neural Brain and (2) bridging the gap between static AI models and the dynamic adaptability required for real-world deployment. To this end, we propose a biologically inspired architecture that integrates multimodal active sensing, perception-cognition-action function, neuroplasticity-based memory storage and updating, and neuromorphic hardware/software optimization. Furthermore, we also review the latest research on embodied agents across these four aspects and analyze the gap between current AI systems and human intelligence. By synthesizing insights from neuroscience, we outline a roadmap towards the development of generalizable, autonomous agents capable of human-level intelligence in real-world scenarios.