JaxRobotarium: Training and Deploying Multi-Robot Policies in 10 Minutes
作者: Shalin Anand Jain, Jiazhen Liu, Siva Kailas, Harish Ravichandar
分类: cs.RO, cs.LG, cs.MA
发布日期: 2025-05-10 (更新: 2025-11-10)
备注: 22 pages, 14 figures, 10 tables. https://github.com/GT-STAR-Lab/JaxRobotarium. Manuscript accepted for publication at the 9th Conference on Robot Learning (CoRL 2025), Seoul, Korea
🔗 代码/项目: GITHUB
💡 一句话要点
JaxRobotarium:快速训练和部署多机器人策略的端到端平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多机器人系统 强化学习 Jax 仿真平台 机器人协调
📋 核心要点
- 现有MARL平台缺乏机器人相关性和硬件部署能力,研究人员需自行构建环境和测试平台,效率低下。
- JaxRobotarium利用Jax加速,提供端到端的仿真、学习、部署和基准测试,支持并行化和硬件加速。
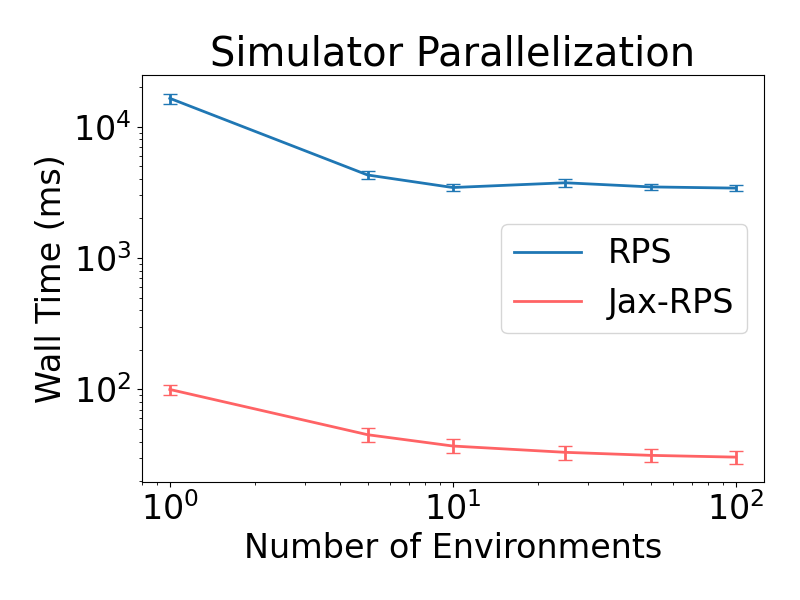
- 实验表明,JaxRobotarium在保持高仿真度的同时,训练速度提升20倍,仿真速度提升150倍。
📝 摘要(中文)
多智能体强化学习(MARL)已成为在多机器人系统中学习复杂和可扩展的协调行为的一种有前景的解决方案。然而,现有的MARL平台(如SMAC和MPE)缺乏机器人相关性和硬件部署能力,使得多机器人学习研究人员需要开发定制的环境和硬件测试平台来专门开发和评估他们的个人贡献。Multi-Agent RL Benchmark and Learning Environment for the Robotarium (MARBLER) 是一个令人兴奋的进步,它通过将Robotarium测试平台与现有的MARL软件基础设施连接起来,为MARL提供了一个标准化的、与机器人相关的平台。然而,MARBLER缺乏对并行化和GPU/TPU执行的支持,这使得该平台与现代MARL环境相比速度非常慢,并阻碍了其应用。我们贡献了JaxRobotarium,一个基于Jax的端到端仿真、学习、部署和基准测试平台,用于Robotarium。JaxRobotarium能够快速训练和部署具有真实机器人动力学和安全约束的多机器人强化学习(MRRL)策略,支持并行化和硬件加速。我们通用的学习接口可以轻松地与SOTA MARL库(如JaxMARL)集成。此外,JaxRobotarium还包括八个标准化的协调场景,包括四个新的场景,这些场景将已建立的MARL基准任务(如RWARE和Level-Based Foraging)引入到机器人环境中。我们证明了JaxRobotarium在保持高仿真保真度的同时,实现了相对于基线的显著加速(训练中20倍,仿真中150倍),并通过Robotarium测试平台提供了一个开放访问的sim-to-real评估管道,加速并普及了多机器人学习研究和评估。
🔬 方法详解
问题定义:现有的多智能体强化学习平台,如SMAC和MPE,虽然在算法研究方面取得了显著进展,但它们与实际机器人系统的关联性较弱。研究人员通常需要为特定的机器人平台和任务定制开发环境和测试平台,这导致了重复劳动和资源浪费。MARBLER虽然尝试弥合这一差距,但缺乏对并行计算和硬件加速的支持,限制了其在大规模多机器人系统中的应用。
核心思路:JaxRobotarium的核心思路是构建一个基于Jax的端到端平台,该平台能够支持快速仿真、高效训练和便捷部署。通过利用Jax的自动微分、即时编译和并行计算能力,JaxRobotarium旨在显著提高多机器人强化学习的效率和可扩展性。此外,该平台还提供了一系列标准化的机器人协调场景,方便研究人员进行算法评估和比较。
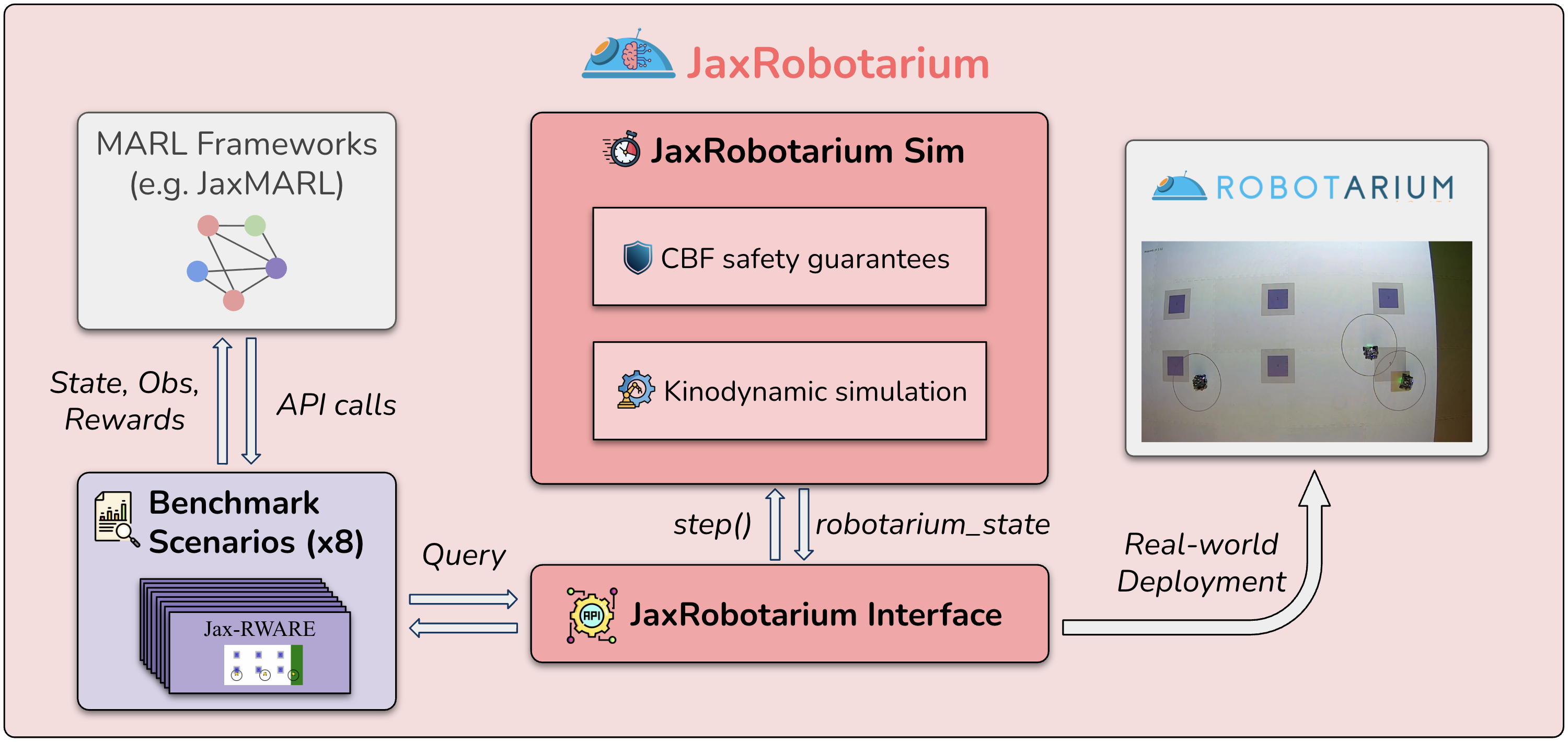
技术框架:JaxRobotarium的整体框架包括以下几个主要模块:1) 基于Jax的机器人动力学仿真器,用于模拟多机器人系统的行为;2) 通用的强化学习接口,可以与各种SOTA MARL库(如JaxMARL)集成;3) 一组标准化的机器人协调场景,包括RWARE和Level-Based Foraging等经典MARL任务的机器人版本;4) 一个sim-to-real评估管道,允许研究人员在Robotarium测试平台上验证算法的实际性能。
关键创新:JaxRobotarium的关键创新在于其对Jax的深度利用,从而实现了高效的并行化和硬件加速。与传统的基于Python的仿真平台相比,JaxRobotarium能够充分利用GPU和TPU的计算能力,显著提高仿真和训练速度。此外,该平台还提供了一个完整的端到端解决方案,涵盖了从仿真到部署的各个环节,简化了多机器人强化学习的流程。
关键设计:JaxRobotarium的关键设计包括:1) 使用Jax编写的机器人动力学模型,支持自动微分和即时编译;2) 基于JAXMARL的强化学习算法实现,方便研究人员进行算法开发和定制;3) 一组精心设计的机器人协调场景,涵盖了各种常见的多机器人任务;4) 一个基于Robotarium API的sim-to-real接口,允许研究人员将仿真结果直接部署到真实机器人上。具体的参数设置、损失函数和网络结构取决于所使用的强化学习算法和任务。
🖼️ 关键图片

📊 实验亮点
JaxRobotarium在仿真速度和训练速度上均取得了显著提升。与基线系统相比,JaxRobotarium在训练速度上提升了20倍,在仿真速度上提升了150倍。此外,该平台还通过Robotarium测试平台验证了sim-to-real的有效性,证明了其在实际机器人系统中的应用潜力。
🎯 应用场景
JaxRobotarium可应用于各种多机器人协调任务,如仓库自动化、搜索救援、环境监测和协同制造。该平台能够加速多机器人强化学习算法的开发和部署,降低研究门槛,并促进多机器人系统在实际场景中的应用。未来,JaxRobotarium有望成为多机器人学习研究的标准平台,推动该领域的发展。
📄 摘要(原文)
Multi-agent reinforcement learning (MARL) has emerged as a promising solution for learning complex and scalable coordination behaviors in multi-robot systems. However, established MARL platforms (e.g., SMAC and MPE) lack robotics relevance and hardware deployment, leaving multi-robot learning researchers to develop bespoke environments and hardware testbeds dedicated to the development and evaluation of their individual contributions. The Multi-Agent RL Benchmark and Learning Environment for the Robotarium (MARBLER) is an exciting recent step in providing a standardized robotics-relevant platform for MARL, by bridging the Robotarium testbed with existing MARL software infrastructure. However, MARBLER lacks support for parallelization and GPU/TPU execution, making the platform prohibitively slow compared to modern MARL environments and hindering adoption. We contribute JaxRobotarium, a Jax-powered end-to-end simulation, learning, deployment, and benchmarking platform for the Robotarium. JaxRobotarium enables rapid training and deployment of multi-robot RL (MRRL) policies with realistic robot dynamics and safety constraints, supporting parallelization and hardware acceleration. Our generalizable learning interface integrates easily with SOTA MARL libraries (e.g., JaxMARL). In addition, JaxRobotarium includes eight standardized coordination scenarios, including four novel scenarios that bring established MARL benchmark tasks (e.g., RWARE and Level-Based Foraging) to a robotics setting. We demonstrate that JaxRobotarium retains high simulation fidelity while achieving dramatic speedups over baseline (20x in training and 150x in simulation), and provides an open-access sim-to-real evaluation pipeline through the Robotarium testbed, accelerating and democratizing access to multi-robot learning research and evaluation. Our code is available at https://github.com/GT-STAR-Lab/JaxRobotarium.