LLM-Flock: Decentralized Multi-Robot Flocking via Large Language Models and Influence-Based Consensus
作者: Peihan Li, Lifeng Zhou
分类: cs.RO
发布日期: 2025-05-10
💡 一句话要点
LLM-Flock:基于大语言模型和影响共识的去中心化多机器人集群控制
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人系统 集群控制 大型语言模型 去中心化决策 共识协议
📋 核心要点
- 现有方法直接应用LLM于多机器人编队控制,易出现幻觉推理、逻辑不一致等问题,导致系统不稳定。
- 论文提出LLM-Flock框架,结合LLM与基于影响的计划共识协议,实现去中心化的稳定集群控制。
- 实验结果表明,该方法在稳定性、收敛性和适应性方面优于现有LLM方法,并在真实无人机上验证了可行性。
📝 摘要(中文)
近年来,大型语言模型(LLMs)发展迅速,在问题理解和推理方面表现出强大的能力。受此启发,研究人员开始探索使用LLMs作为多机器人编队控制的去中心化决策者。然而,先前的研究表明,直接应用LLMs于此类任务通常会导致不稳定和不一致的行为,由于幻觉推理、逻辑不一致和有限的协调意识,机器人可能会崩溃到其位置的质心或完全发散。为了克服这些限制,我们提出了一个新颖的框架,该框架将LLMs与基于影响的计划共识协议相结合。在该框架中,每个机器人使用其自己的LLM独立生成一个朝向期望编队的局部计划。然后,机器人通过去中心化的共识协议迭代地细化它们的计划,该协议考虑了它们对相邻机器人的影响。这个过程驱动系统以完全去中心化的方式朝着连贯和稳定的集群编队发展。我们通过涉及最先进的闭源LLMs(例如,o3-mini,Claude 3.5)和开源模型(例如,Llama3.1-405b,Qwen-Max,DeepSeek-R1)的全面仿真来评估我们的方法。结果表明,与以前基于LLM的方法相比,在稳定性、收敛性和适应性方面有显著改进。我们进一步在一个真实的Crazyflie无人机团队上验证了我们的框架,证明了其在现实世界多机器人系统中的实际可行性和有效性。
🔬 方法详解
问题定义:论文旨在解决多机器人编队控制中,直接使用大型语言模型(LLM)进行去中心化决策时出现的稳定性问题。现有方法由于LLM的幻觉推理、逻辑不一致以及缺乏全局协调意识,导致机器人集群容易崩溃或发散,无法形成稳定的编队。
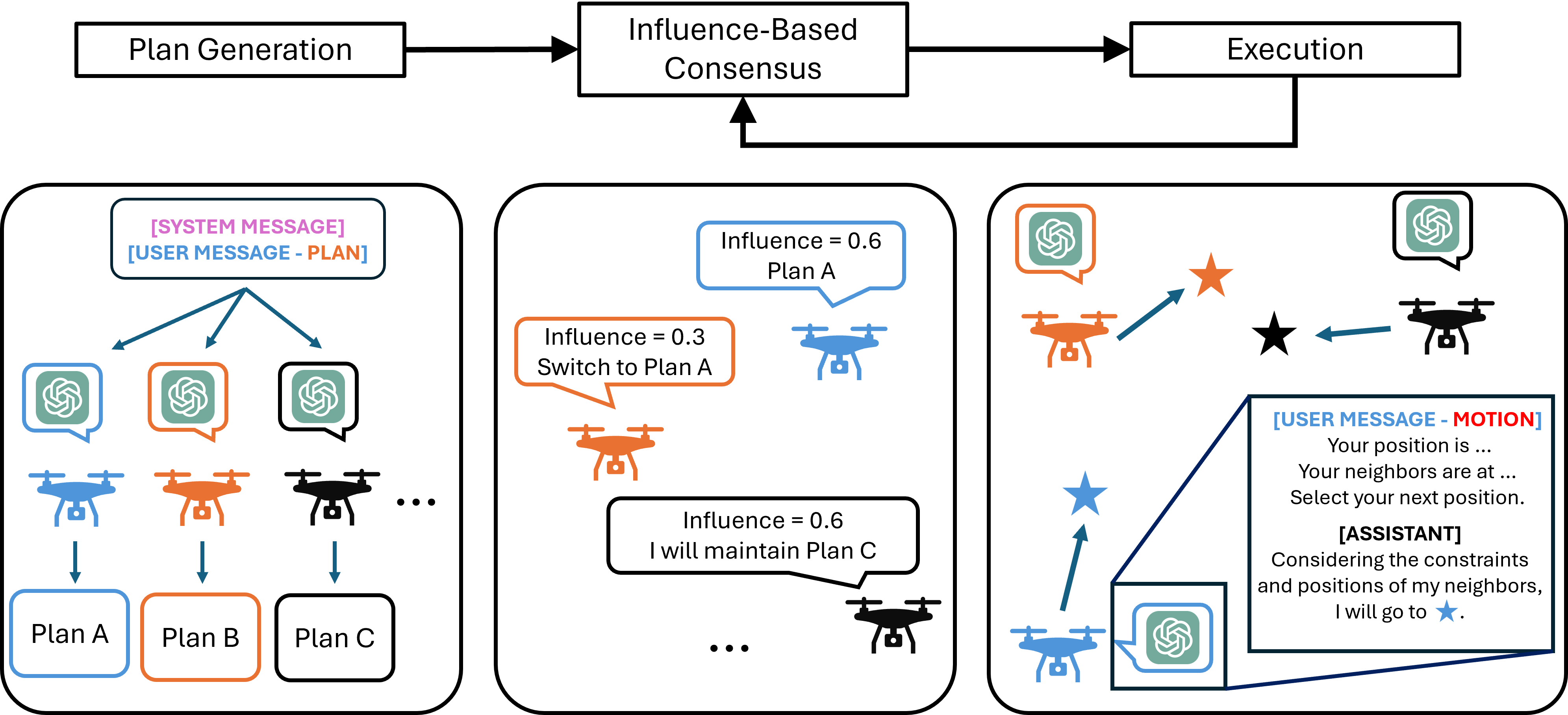
核心思路:论文的核心思路是将LLM的规划能力与基于影响的共识协议相结合。每个机器人首先利用LLM生成局部规划,然后通过考虑邻近机器人影响力的共识机制,迭代优化各自的规划。这种设计旨在利用LLM的推理能力,同时通过共识机制保证集群的稳定性和一致性。
技术框架:LLM-Flock框架包含以下主要模块:1) LLM局部规划模块:每个机器人使用LLM根据自身状态和目标编队生成局部运动规划。2) 影响评估模块:每个机器人评估其对邻近机器人的影响程度。3) 共识协议模块:机器人之间通过去中心化的共识协议,根据彼此的影响力和局部规划,迭代更新各自的规划。4) 运动执行模块:机器人执行最终的运动规划。
关键创新:该方法最重要的创新点在于将LLM的规划能力与基于影响的共识协议相结合,从而在去中心化的多机器人系统中实现了稳定和一致的编队控制。与直接使用LLM的方法相比,该方法通过共识机制纠正了LLM的幻觉和逻辑错误,提高了系统的鲁棒性。
关键设计:影响评估模块的设计是关键。论文可能采用某种形式的注意力机制或图神经网络来评估机器人之间的影响力。共识协议的具体形式(例如,加权平均、迭代更新规则)以及相关的参数设置(例如,学习率、迭代次数)也会影响系统的性能。具体的损失函数设计未知,但推测会包含编队误差、碰撞避免等约束。
🖼️ 关键图片
📊 实验亮点
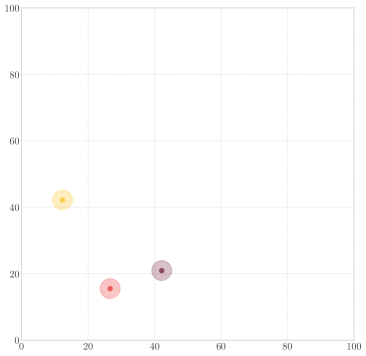
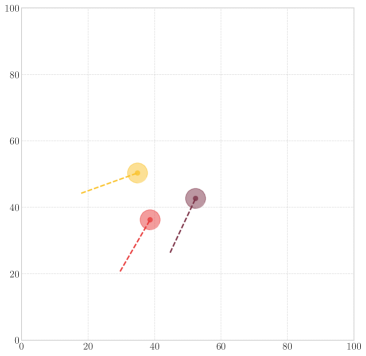
实验结果表明,LLM-Flock框架在稳定性、收敛性和适应性方面显著优于现有的LLM方法。具体而言,在仿真实验中,该方法能够使机器人集群更快地收敛到目标编队,并且在面对环境变化和机器人故障时表现出更强的鲁棒性。此外,在真实的Crazyflie无人机实验中,该方法也成功实现了稳定的集群飞行。
🎯 应用场景
该研究成果可应用于无人机集群表演、自主巡检、搜救行动、环境监测等领域。通过结合LLM的智能决策能力和多机器人系统的协同能力,可以实现更高效、更灵活的任务执行。未来,该技术有望扩展到更复杂的机器人系统和应用场景,例如自动驾驶车队、智能仓储系统等。
📄 摘要(原文)
Large Language Models (LLMs) have advanced rapidly in recent years, demonstrating strong capabilities in problem comprehension and reasoning. Inspired by these developments, researchers have begun exploring the use of LLMs as decentralized decision-makers for multi-robot formation control. However, prior studies reveal that directly applying LLMs to such tasks often leads to unstable and inconsistent behaviors, where robots may collapse to the centroid of their positions or diverge entirely due to hallucinated reasoning, logical inconsistencies, and limited coordination awareness. To overcome these limitations, we propose a novel framework that integrates LLMs with an influence-based plan consensus protocol. In this framework, each robot independently generates a local plan toward the desired formation using its own LLM. The robots then iteratively refine their plans through a decentralized consensus protocol that accounts for their influence on neighboring robots. This process drives the system toward a coherent and stable flocking formation in a fully decentralized manner. We evaluate our approach through comprehensive simulations involving both state-of-the-art closed-source LLMs (e.g., o3-mini, Claude 3.5) and open-source models (e.g., Llama3.1-405b, Qwen-Max, DeepSeek-R1). The results show notable improvements in stability, convergence, and adaptability over previous LLM-based methods. We further validate our framework on a physical team of Crazyflie drones, demonstrating its practical viability and effectiveness in real-world multi-robot systems.