Physics-informed Temporal Difference Metric Learning for Robot Motion Planning
作者: Ruiqi Ni, Zherong Pan, Ahmed H Qureshi
分类: cs.RO, cs.LG
发布日期: 2025-05-09
备注: Accepted to ICLR 2025
💡 一句话要点
提出基于物理信息的时序差分度量学习方法,提升机器人运动规划在复杂环境中的性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动规划 自监督学习 时序差分学习 度量学习 Eikonal方程
📋 核心要点
- 现有自监督运动规划方法难以在复杂环境中保持Eikonal方程的关键性质,如最优值函数和测地距离。
- 提出一种基于物理信息的时序差分度量学习方法,通过强化贝尔曼最优性原则和度量学习来解决Eikonal方程。
- 实验表明,该方法在复杂和未见过的环境中显著优于现有方法,适用于2到12自由度的机器人配置。
📝 摘要(中文)
本文提出了一种新颖的自监督时序差分度量学习方法,旨在更准确地求解Eikonal方程,从而提升复杂和未见过的规划任务的性能。该方法在有限区域内强制执行贝尔曼最优性原则,利用时序差分学习避免虚假的局部最小值,同时结合度量学习来保持Eikonal方程的基本测地线属性。实验结果表明,在处理复杂环境和泛化到未见过的环境方面,该方法显著优于现有的自监督学习方法,机器人配置自由度范围从2到12。
🔬 方法详解
问题定义:机器人运动规划旨在寻找从起始配置到目标配置的无碰撞路径。现有的自监督学习方法虽然避免了昂贵的专家演示,但难以在复杂环境中维持Eikonal方程的关键属性,导致规划性能下降。
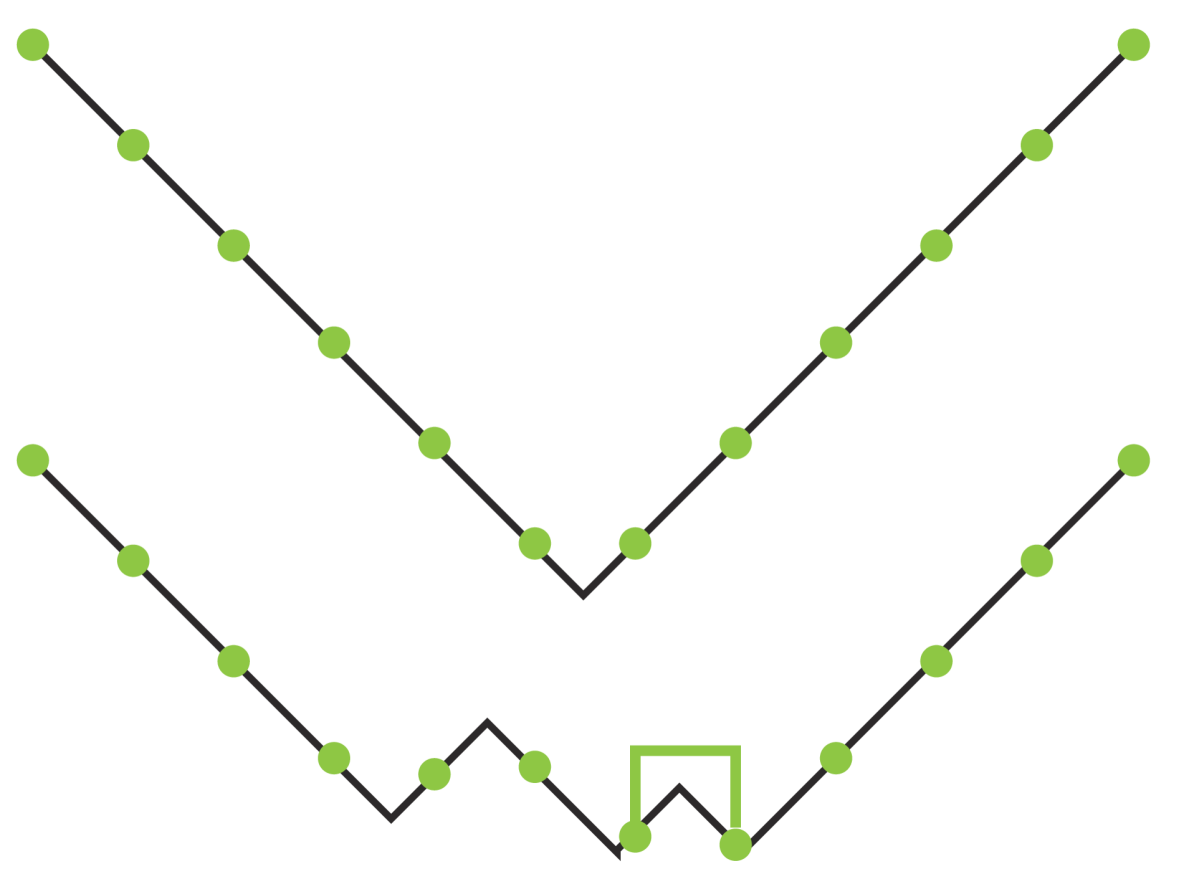
核心思路:论文的核心思路是结合时序差分学习和度量学习,更精确地求解Eikonal方程。时序差分学习用于强化贝尔曼最优性原则,避免陷入局部最优;度量学习则用于保持Eikonal方程的测地线距离特性。
技术框架:该方法主要包含以下几个阶段:首先,利用神经网络近似值函数。然后,通过时序差分学习,在有限区域内强制执行贝尔曼最优性原则,更新值函数。同时,利用度量学习,约束值函数,使其满足Eikonal方程的测地线距离特性。最后,利用学习到的值函数进行运动规划。
关键创新:该方法最重要的创新点在于将时序差分学习和度量学习相结合,用于求解Eikonal方程。这种结合既能保证值函数的最优性,又能保持Eikonal方程的几何特性,从而提高了运动规划的性能。与现有方法相比,该方法更有效地利用了Eikonal方程的物理信息。
关键设计:论文中,时序差分学习采用TD(0)算法,损失函数设计为值函数预测值与目标值之间的均方误差。度量学习则通过约束相邻状态的值函数差异来保持测地线距离。网络结构采用多层感知机,输入为机器人配置,输出为值函数值。具体参数设置(如学习率、折扣因子等)未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在复杂环境中显著优于现有的自监督学习方法。在多个运动规划任务中,该方法能够更快地找到无碰撞路径,并且能够更好地泛化到未见过的环境中。具体性能提升数据未知,但论文强调了在2到12自由度的机器人配置下,该方法均表现出优越的性能。
🎯 应用场景
该研究成果可应用于各种机器人运动规划场景,尤其是在复杂和动态环境中。例如,可用于自动驾驶汽车的路径规划、工业机器人的轨迹生成、以及服务机器人在拥挤环境中的导航。该方法能够提高机器人在复杂环境中的运动规划效率和安全性,具有重要的实际应用价值。
📄 摘要(原文)
The motion planning problem involves finding a collision-free path from a robot's starting to its target configuration. Recently, self-supervised learning methods have emerged to tackle motion planning problems without requiring expensive expert demonstrations. They solve the Eikonal equation for training neural networks and lead to efficient solutions. However, these methods struggle in complex environments because they fail to maintain key properties of the Eikonal equation, such as optimal value functions and geodesic distances. To overcome these limitations, we propose a novel self-supervised temporal difference metric learning approach that solves the Eikonal equation more accurately and enhances performance in solving complex and unseen planning tasks. Our method enforces Bellman's principle of optimality over finite regions, using temporal difference learning to avoid spurious local minima while incorporating metric learning to preserve the Eikonal equation's essential geodesic properties. We demonstrate that our approach significantly outperforms existing self-supervised learning methods in handling complex environments and generalizing to unseen environments, with robot configurations ranging from 2 to 12 degrees of freedom (DOF).