A Physics-informed End-to-End Occupancy Framework for Motion Planning of Autonomous Vehicles
作者: Shuqi Shen, Junjie Yang, Hongliang Lu, Hui Zhong, Qiming Zhang, Xinhu Zheng
分类: cs.RO
发布日期: 2025-05-08 (更新: 2025-06-06)
💡 一句话要点
提出物理信息融合的端到端占据栅格框架,用于自动驾驶车辆运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 自动驾驶 运动规划 占据栅格预测 物理信息融合 人工势场 端到端学习 深度学习
📋 核心要点
- 现有端到端占据预测方法缺乏明确的物理约束,导致安全性和泛化能力受限,难以应对复杂环境。
- 该论文提出一种端到端框架,将人工势场(APF)作为物理信息指导嵌入到占据学习过程中,提升数据效率和物理合理性。
- 实验结果表明,该方法在任务完成率、安全裕度和规划效率方面均有提升,验证了其在实际自动驾驶系统中的潜力。
📝 摘要(中文)
精确且可解释的运动规划对于自动驾驶车辆(AVs)在复杂和不确定环境中导航至关重要。虽然最近的端到端占据预测方法提高了环境理解能力,但它们通常缺乏明确的物理约束,限制了安全性和泛化能力。本文提出了一种统一的端到端框架,该框架将可验证的物理规则集成到占据学习过程中。具体来说,我们在网络训练期间嵌入人工势场(APF)作为物理信息指导,以确保预测的占据地图既具有数据效率又符合物理规律。我们的架构结合了卷积和循环神经网络,以捕获空间和时间依赖性,同时保持模型的灵活性。实验结果表明,我们的方法提高了各种驾驶场景中的任务完成率、安全裕度和规划效率,证实了其在现实世界AV系统中可靠部署的潜力。
🔬 方法详解
问题定义:自动驾驶车辆需要在复杂和不确定的环境中进行安全可靠的运动规划。现有的端到端占据预测方法虽然能够进行环境理解,但是缺乏明确的物理约束,导致预测结果可能不符合物理规律,从而影响运动规划的安全性,并且泛化能力较差。
核心思路:该论文的核心思路是将物理信息融入到端到端的占据栅格预测框架中。具体来说,利用人工势场(APF)作为物理约束,引导网络学习符合物理规律的占据栅格地图。这样可以提高预测结果的合理性,增强模型的泛化能力,并最终提升自动驾驶车辆运动规划的安全性。
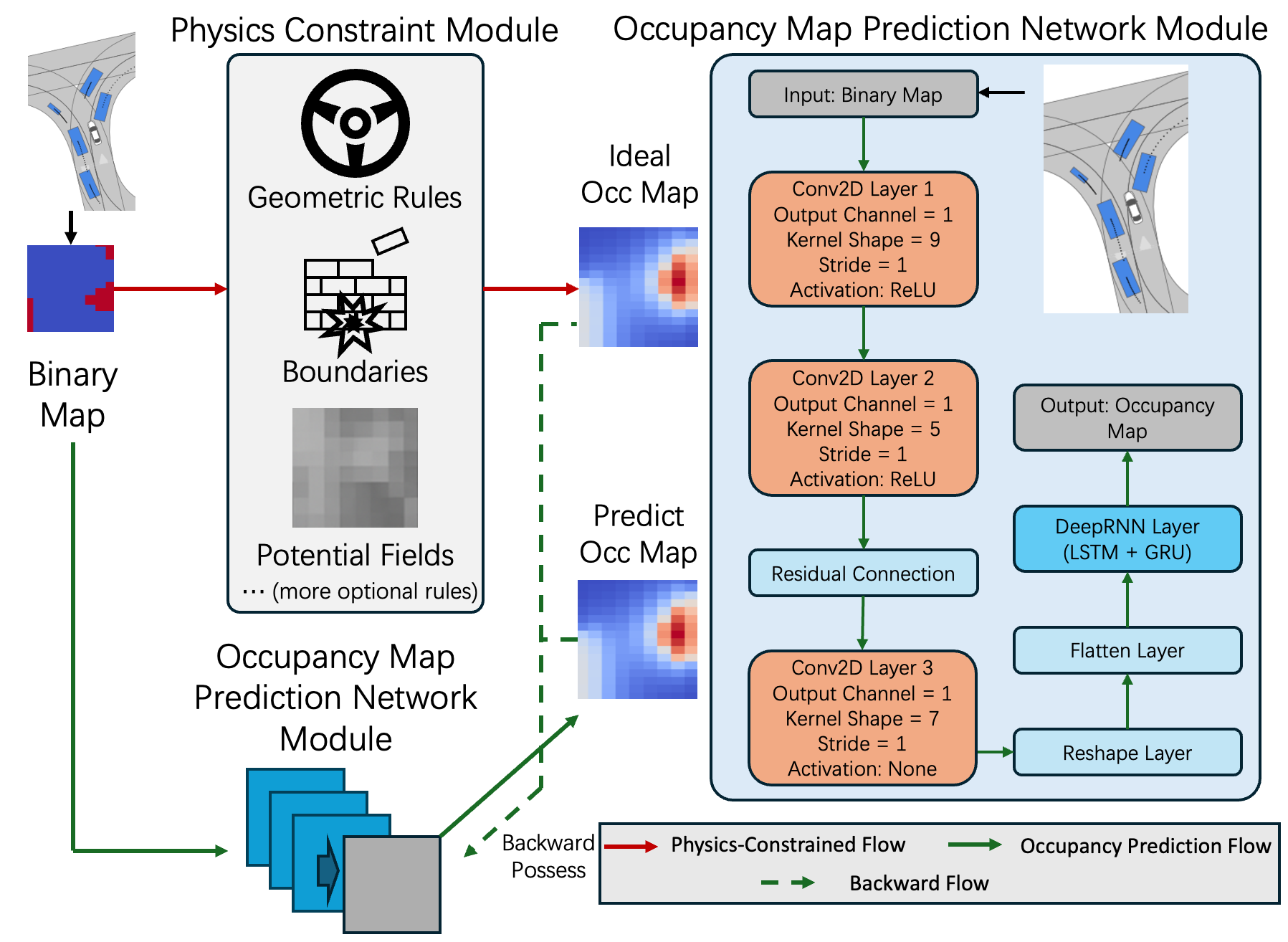
技术框架:该框架是一个端到端的学习系统,输入是传感器数据(例如激光雷达点云),输出是占据栅格地图。该框架主要包含以下几个模块:1) 特征提取模块:使用卷积神经网络(CNN)提取输入数据的空间特征。2) 时序建模模块:使用循环神经网络(RNN)捕获时间依赖关系。3) 物理信息融合模块:将人工势场(APF)作为物理约束,引导网络学习。4) 占据栅格预测模块:输出最终的占据栅格地图。
关键创新:该论文最重要的技术创新点在于将物理信息(人工势场)显式地融入到端到端的占据栅格预测框架中。与现有方法相比,该方法不仅利用数据进行学习,还利用物理规律进行约束,从而提高了预测结果的合理性和泛化能力。现有方法主要依赖大量数据进行训练,而该方法通过引入物理信息,可以减少对数据的依赖,提高数据效率。
关键设计:在物理信息融合模块中,人工势场被用来设计损失函数。具体来说,损失函数包含两部分:数据驱动的损失和物理驱动的损失。数据驱动的损失用于衡量预测的占据栅格地图与真实值之间的差异。物理驱动的损失用于衡量预测的占据栅格地图与人工势场之间的差异。通过调整这两个损失的权重,可以控制物理信息的强度。网络结构方面,使用了卷积神经网络提取空间特征,并使用循环神经网络捕获时间依赖关系。具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
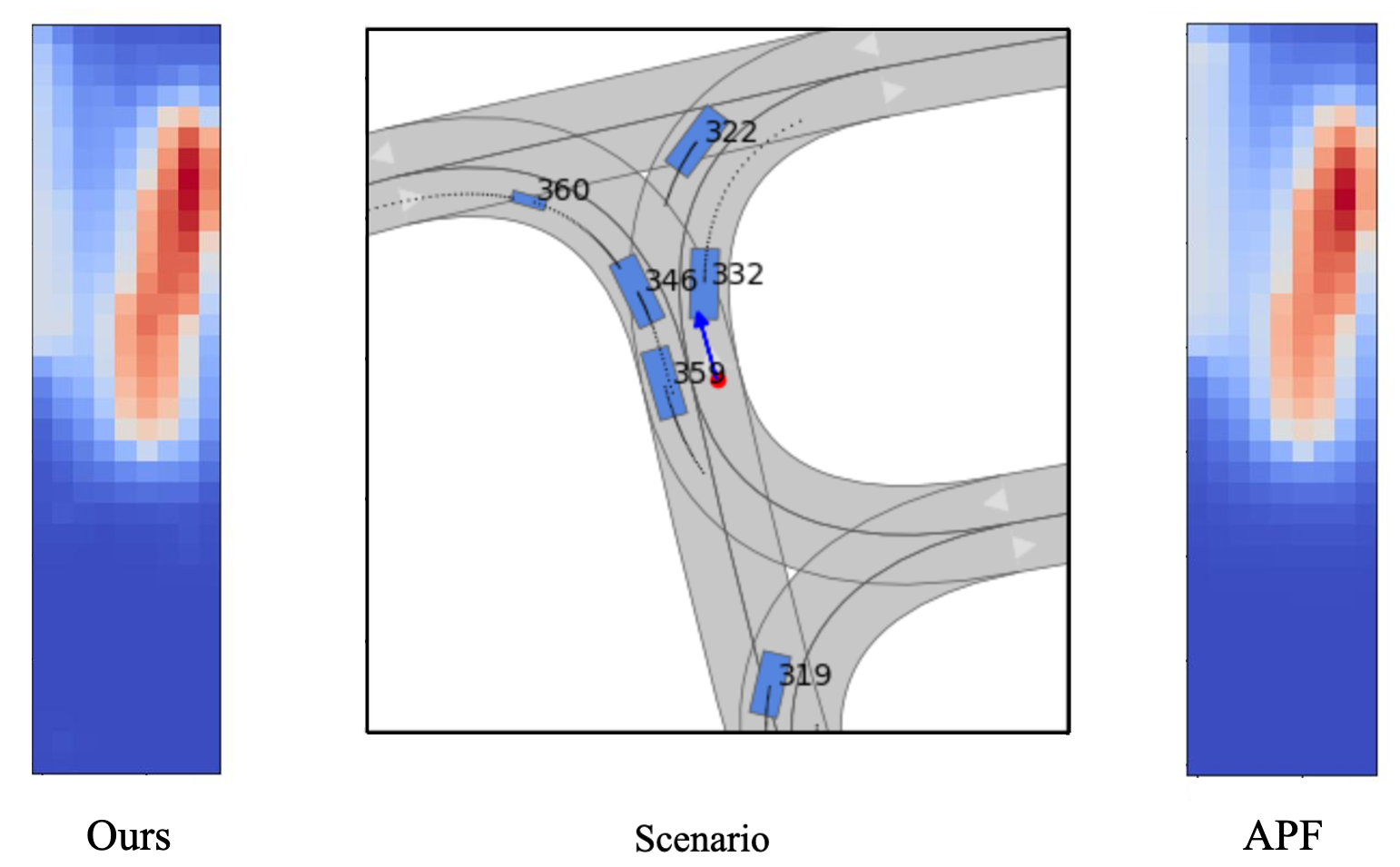
实验结果表明,该方法在各种驾驶场景中提高了任务完成率、安全裕度和规划效率。具体提升幅度未知,但论文强调了在不同场景下的有效性。该方法通过引入物理信息,提高了预测结果的合理性和泛化能力,从而提升了自动驾驶系统的整体性能。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的运动规划、避障和路径规划等领域。通过提高环境感知的准确性和可靠性,可以提升自动驾驶系统的安全性,并使其能够在更复杂的环境中安全行驶。此外,该方法还可以应用于机器人导航、无人机飞行等领域,具有广泛的应用前景。
📄 摘要(原文)
Accurate and interpretable motion planning is essential for autonomous vehicles (AVs) navigating complex and uncertain environments. While recent end-to-end occupancy prediction methods have improved environmental understanding, they typically lack explicit physical constraints, limiting safety and generalization. In this paper, we propose a unified end-to-end framework that integrates verifiable physical rules into the occupancy learning process. Specifically, we embed artificial potential fields (APF) as physics-informed guidance during network training to ensure that predicted occupancy maps are both data-efficient and physically plausible. Our architecture combines convolutional and recurrent neural networks to capture spatial and temporal dependencies while preserving model flexibility. Experimental results demonstrate that our method improves task completion rate, safety margins, and planning efficiency across diverse driving scenarios, confirming its potential for reliable deployment in real-world AV systems.