Real-Time Model Predictive Control of Vehicles with Convex-Polygon-Aware Collision Avoidance in Tight Spaces
作者: Haruki Kojima, Kohei Honda, Hiroyuki Okuda, Tatsuya Suzuki
分类: cs.RO
发布日期: 2025-05-08
备注: 8 pages, 10 figures, 3 tables, The IEEE International Conference on Intelligent Transportation Systems (ITSC) November 18-21, 2025-Gold Coast, Australia
💡 一句话要点
提出基于多边形近似的车辆MPC实时避障算法,解决狭窄空间导航问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 车辆运动规划 碰撞避免 多边形近似 实时控制
📋 核心要点
- 现有车辆运动规划方法在狭窄空间中避障时,难以兼顾精度和计算效率。
- 论文核心在于将车辆和障碍物建模为多边形,并提出两种将析取约束转化为合取约束的避障策略。
- 实验表明,SVM方法精度高但计算量大,MSDE方法精度稍降但能实时运行。
📝 摘要(中文)
本文提出了一种车辆运动规划方法,通过将车辆和障碍物的多边形近似纳入模型预测控制(MPC)框架,实现在狭窄空间中的避障。精确表示这些形状对于在狭窄空间中导航以确保准确的碰撞检测至关重要。然而,引入多边形近似会在MPC公式中产生析取OR约束,这需要混合整数规划并导致显著的计算成本。为了克服这个问题,我们提出了两种不同的避障约束,将析取OR约束重构为易于处理的合取AND约束:(1)基于支持向量机(SVM)的公式,将避障问题转化为SVM优化问题;(2)最小有符号距离到边缘(MSDE)公式,利用最小有符号距离度量。我们通过广泛的仿真(包括狭窄空间停车场景和各种形状的障碍物课程)以及RC遥控车平台上的硬件实验验证了这两种方法。结果表明,基于SVM的方法在受限环境中实现了卓越的导航精度;相比之下,MSDE方法以实时运行,仅略微降低了避障性能。
🔬 方法详解
问题定义:在狭窄空间中,车辆需要精确的运动规划以避免与障碍物发生碰撞。传统的MPC方法在处理复杂形状的障碍物时,通常采用简化模型,导致避障精度下降。而直接使用多边形近似会导致MPC问题中出现析取OR约束,使得求解过程需要混合整数规划,计算复杂度极高,难以满足实时性要求。
核心思路:论文的核心思路是将复杂的析取OR约束转化为易于求解的合取AND约束。通过这种转化,避免了混合整数规划,从而降低了计算复杂度,实现了实时性。论文提出了两种不同的转化方法,分别基于SVM和MSDE。
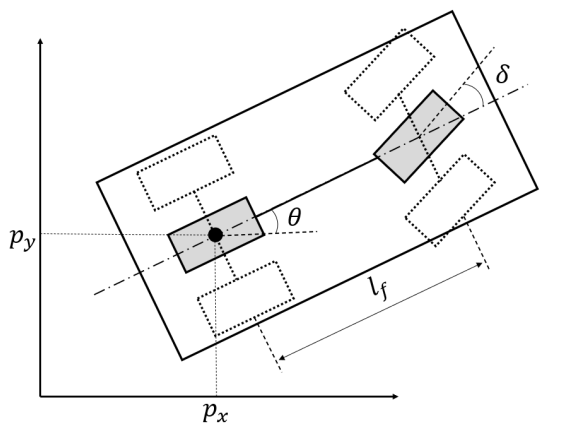
技术框架:该方法基于模型预测控制(MPC)框架。首先,将车辆和障碍物用多边形进行近似表示。然后,将避障问题转化为MPC问题,其中避障约束是关键。论文提出了两种不同的避障约束公式:(1) 基于SVM的公式,将避障问题转化为SVM优化问题;(2) 基于MSDE的公式,利用最小有符号距离度量。最后,使用优化求解器求解MPC问题,得到车辆的控制指令。
关键创新:论文的关键创新在于提出了两种将析取OR约束转化为合取AND约束的避障方法。这两种方法避免了混合整数规划,显著降低了计算复杂度,使得在狭窄空间中的车辆运动规划能够实时进行。SVM方法和MSDE方法分别代表了精度和效率的不同侧重。
关键设计:对于SVM方法,关键在于如何将避障问题转化为SVM的优化问题。具体来说,需要设计合适的核函数和惩罚因子,以保证避障的有效性和鲁棒性。对于MSDE方法,关键在于如何计算车辆到障碍物边缘的最小有符号距离,以及如何利用这些距离来构建避障约束。此外,MPC的预测时域、控制增量等参数也需要根据具体的应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
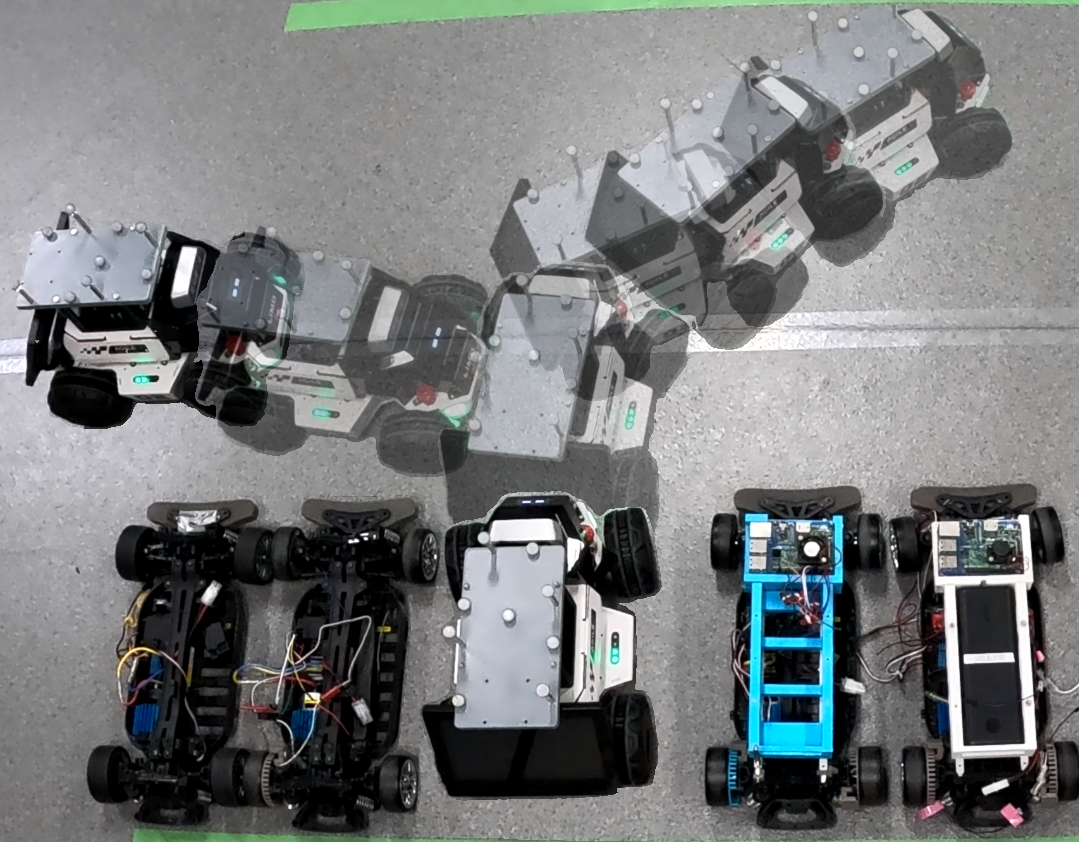
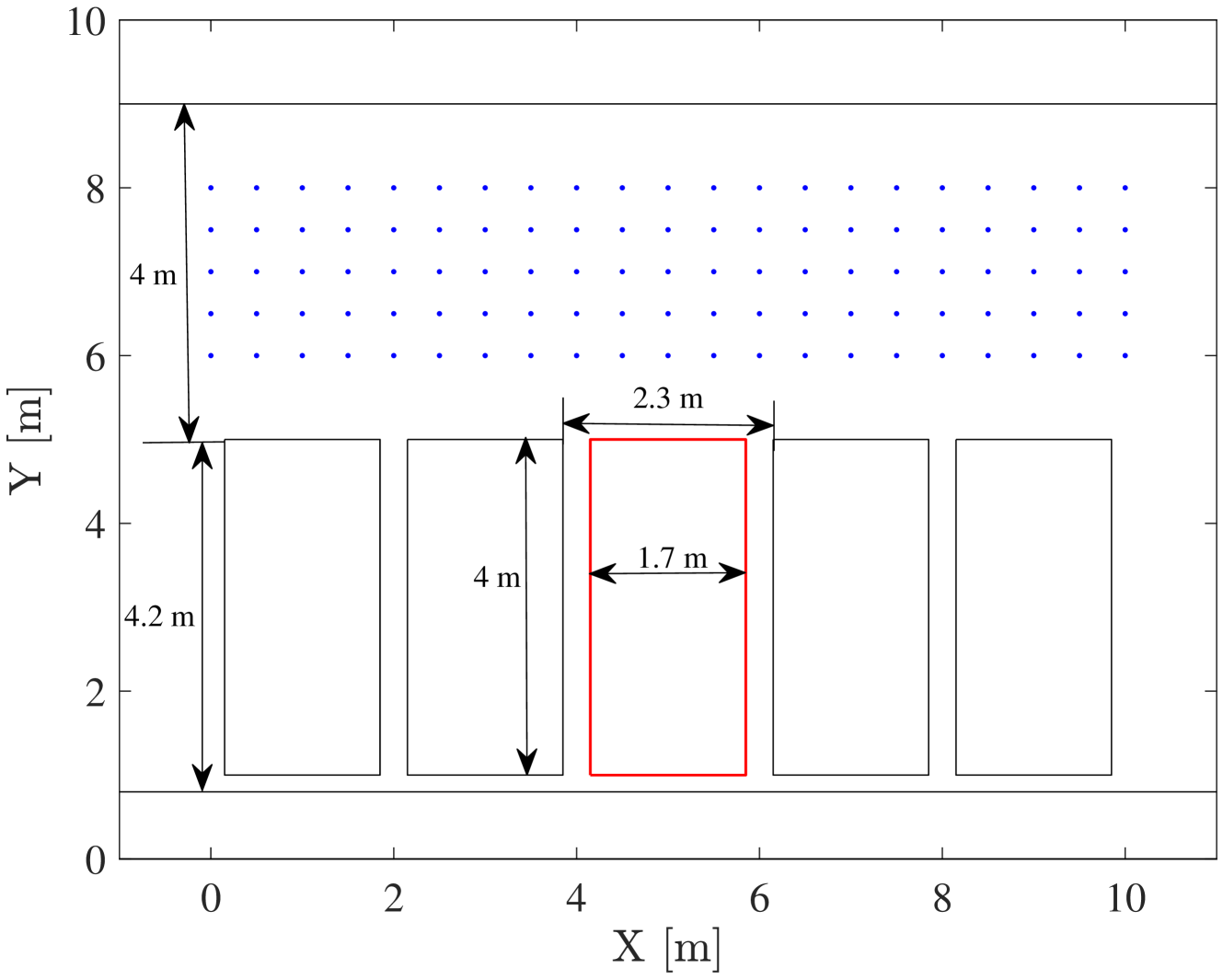
论文通过仿真和硬件实验验证了所提出方法的有效性。在狭窄空间停车场景和各种形状的障碍物课程中,基于SVM的方法实现了更高的导航精度,而MSDE方法则实现了实时运行,计算时间显著降低。在RC遥控车平台上的实验进一步验证了该方法在实际应用中的可行性。
🎯 应用场景
该研究成果可应用于自动泊车系统、无人驾驶车辆在狭窄环境下的导航、以及机器人操作等领域。通过提高车辆在复杂环境中的避障能力,可以提升自动驾驶系统的安全性和可靠性,并拓展其应用范围。未来,该方法有望应用于更复杂的动态环境和多智能体系统。
📄 摘要(原文)
This paper proposes vehicle motion planning methods with obstacle avoidance in tight spaces by incorporating polygonal approximations of both the vehicle and obstacles into a model predictive control (MPC) framework. Representing these shapes is crucial for navigation in tight spaces to ensure accurate collision detection. However, incorporating polygonal approximations leads to disjunctive OR constraints in the MPC formulation, which require a mixed integer programming and cause significant computational cost. To overcome this, we propose two different collision-avoidance constraints that reformulate the disjunctive OR constraints as tractable conjunctive AND constraints: (1) a Support Vector Machine (SVM)-based formulation that recasts collision avoidance as a SVM optimization problem, and (2) a Minimum Signed Distance to Edges (MSDE) formulation that leverages minimum signed-distance metrics. We validate both methods through extensive simulations, including tight-space parking scenarios and varied-shape obstacle courses, as well as hardware experiments on an RC-car platform. Our results demonstrate that the SVM-based approach achieves superior navigation accuracy in constrained environments; the MSDE approach, by contrast, runs in real time with only a modest reduction in collision-avoidance performance.