PyRoki: A Modular Toolkit for Robot Kinematic Optimization
作者: Chung Min Kim, Brent Yi, Hongsuk Choi, Yi Ma, Ken Goldberg, Angjoo Kanazawa
分类: cs.RO
发布日期: 2025-05-06
备注: First two authors contributed equally. Code is available at https://pyroki-toolkit.github.io
💡 一句话要点
PyRoki:用于机器人运动学优化的模块化、跨平台工具包
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting)
关键词: 机器人运动学 运动规划 优化算法 非线性最小二乘 跨平台
📋 核心要点
- 现有机器人运动学优化工具缺乏灵活性和跨平台支持,难以满足不同任务的需求。
- PyRoki通过模块化设计,将运动学变量和代价函数定义与高效的非线性最小二乘优化器解耦,实现灵活配置。
- 实验表明,PyRoki在CPU、GPU和TPU上均可运行,且在优化速度和精度上优于现有GPU加速库cuRobo。
📝 摘要(中文)
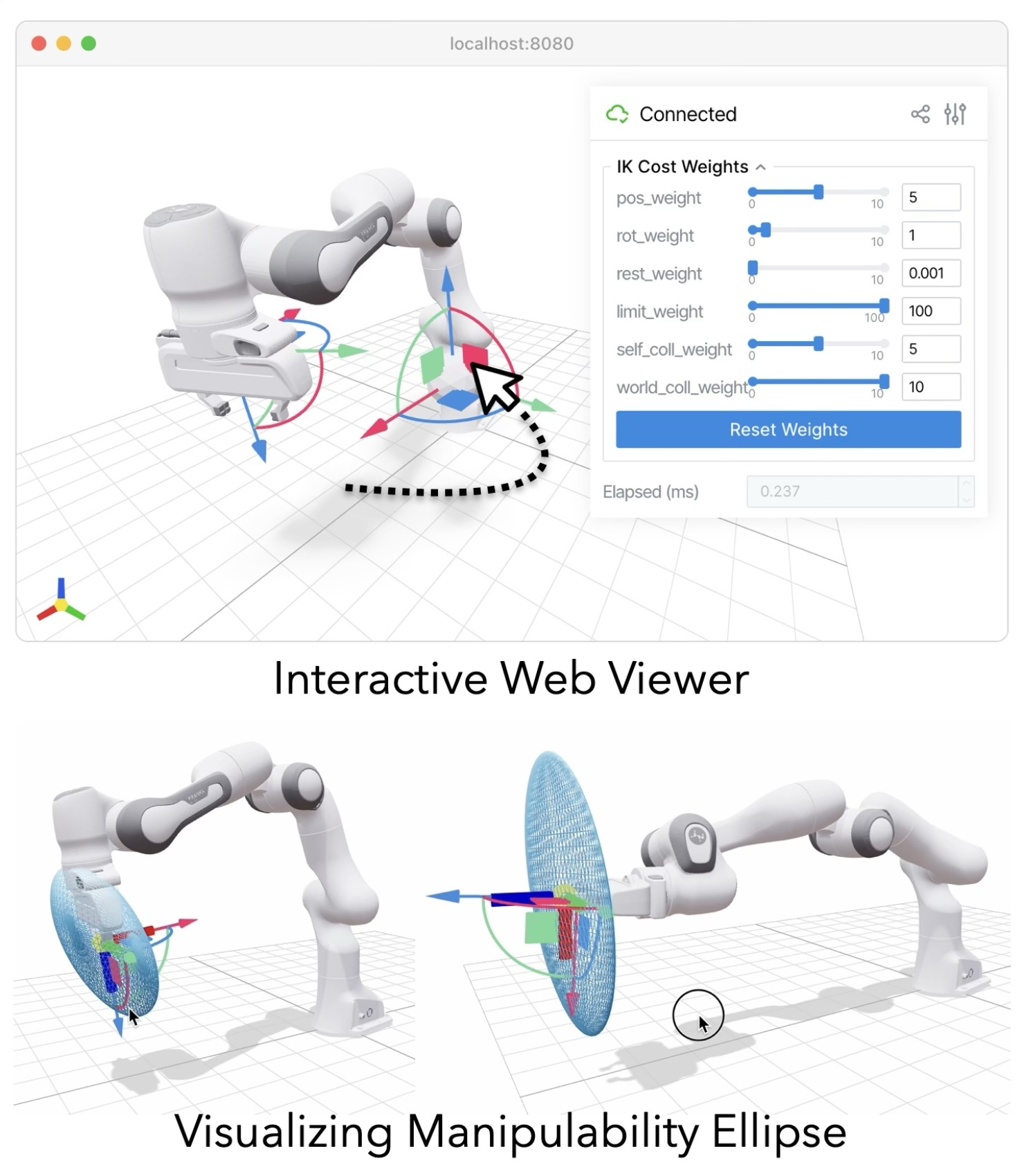
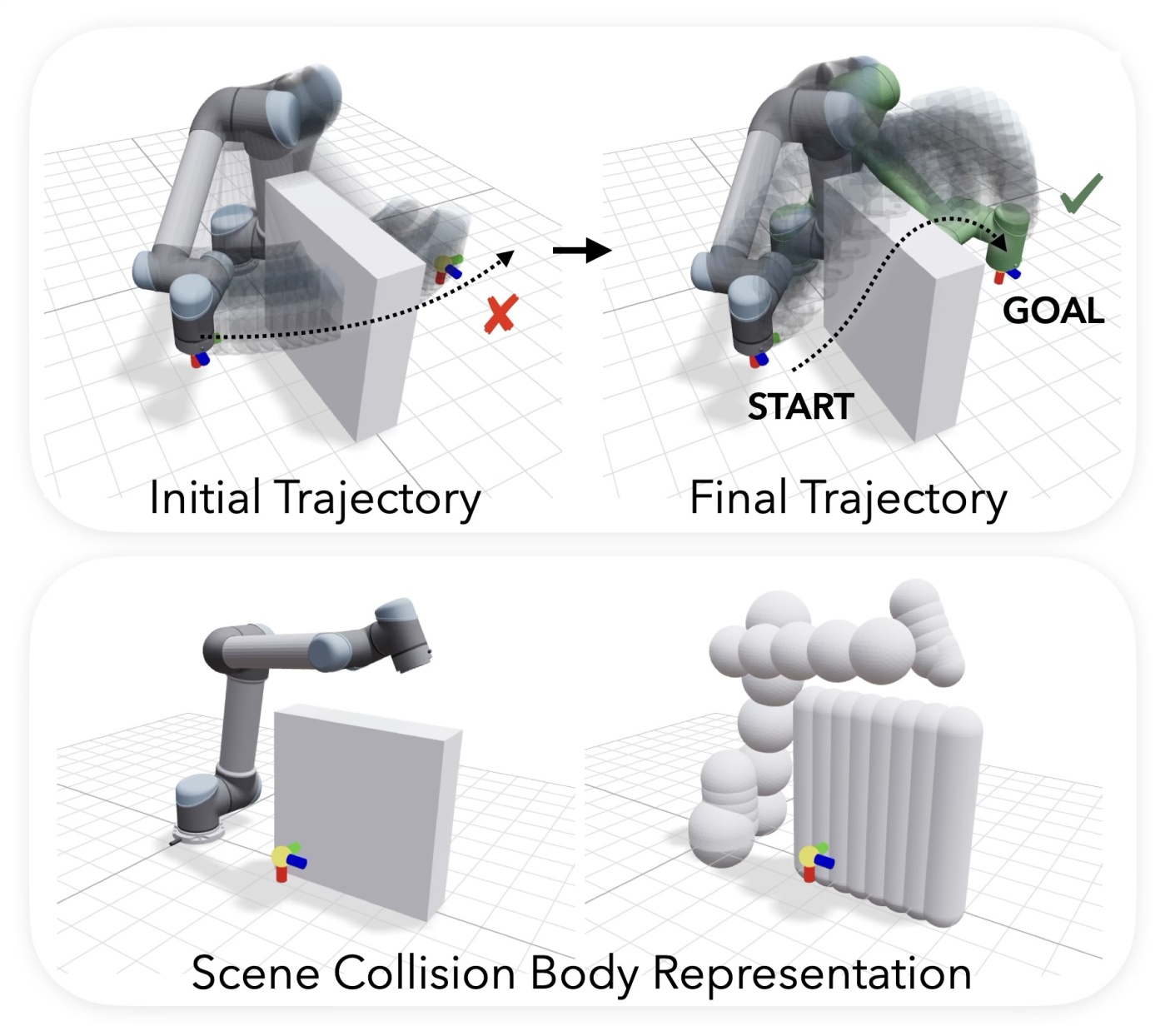
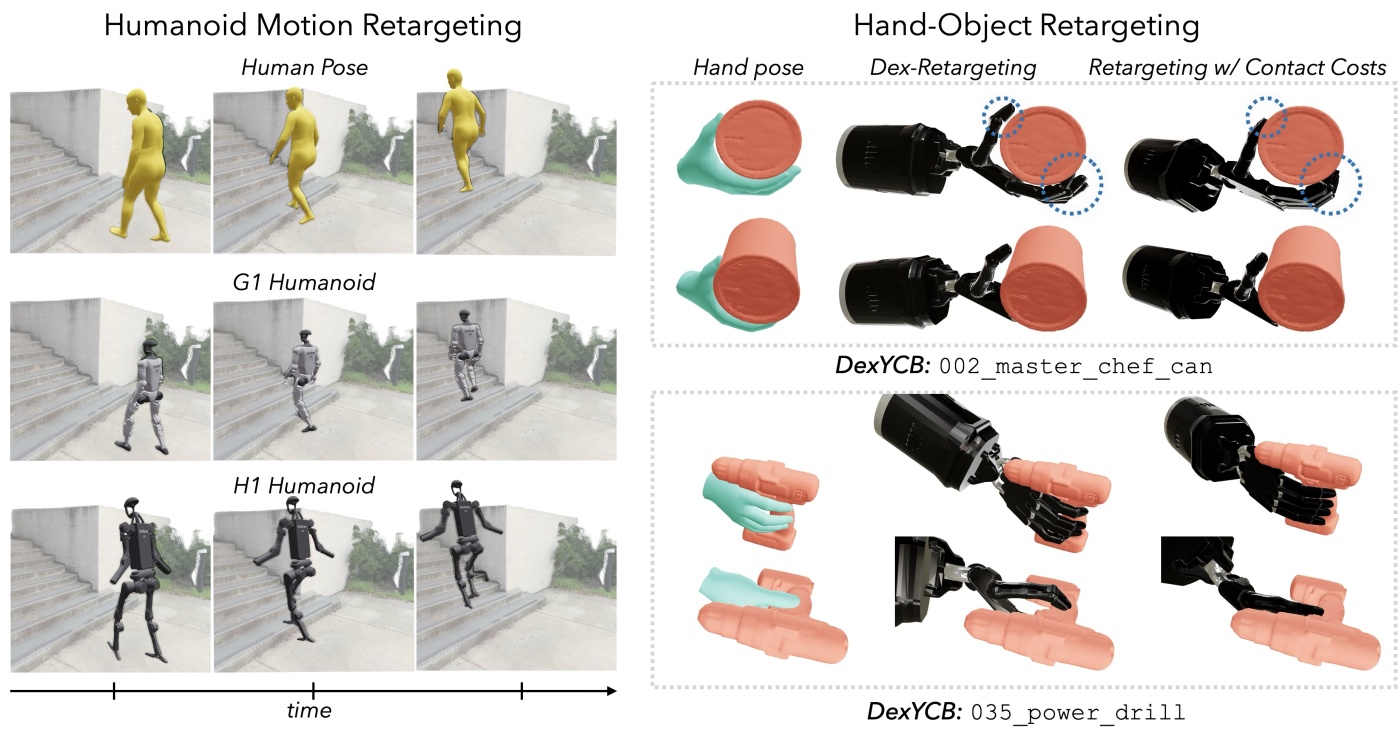
本文介绍PyRoki,一个模块化、可扩展且跨平台的工具包,用于解决机器人运动学优化问题。机器人运动可以有多种目标,例如优化姿态误差、速度、碰撞或与人类演示的相似性。PyRoki将用于指定运动学变量和代价的接口与高效的非线性最小二乘优化器相结合。与现有工具不同,它还是跨平台的:优化可以在CPU、GPU和TPU上本地运行。本文展示了(i)PyRoki的设计和实现,(ii)运动重定向和规划的案例研究,突出了PyRoki模块化的优势,以及(iii)优化基准测试,其中PyRoki比现有的GPU加速逆运动学库cuRobo快1.4-1.7倍,并且收敛到更低的误差。
🔬 方法详解
问题定义:机器人运动规划和控制需要解决运动学优化问题,即在满足各种约束(如避免碰撞、关节限制等)的情况下,找到最优的机器人关节角度或末端执行器轨迹。现有方法通常缺乏模块化设计,难以灵活地定义不同的优化目标和约束条件,并且对硬件平台的依赖性较高。
核心思路:PyRoki的核心思路是将运动学优化问题分解为模块化的组件,包括运动学变量定义、代价函数定义和优化求解器。用户可以根据具体任务需求,灵活地组合这些模块,从而构建定制化的优化问题。此外,PyRoki采用跨平台的设计,支持在CPU、GPU和TPU等不同硬件平台上运行,提高了其适用性。
技术框架:PyRoki的整体框架包括以下几个主要模块:1) 运动学模型定义模块:用于定义机器人的运动学结构,包括关节类型、连杆长度等。2) 变量定义模块:用于定义需要优化的运动学变量,如关节角度、末端执行器姿态等。3) 代价函数定义模块:用于定义优化目标,如姿态误差、速度、碰撞代价等。4) 优化求解器模块:采用非线性最小二乘优化算法,求解优化问题。这些模块之间通过清晰的接口进行交互,方便用户进行扩展和定制。
关键创新:PyRoki的关键创新在于其模块化和跨平台的设计。模块化设计使得用户可以灵活地定义和组合不同的优化目标和约束条件,从而适应不同的任务需求。跨平台设计使得PyRoki可以在不同的硬件平台上运行,提高了其适用性。此外,PyRoki还采用了高效的非线性最小二乘优化算法,提高了优化速度和精度。
关键设计:PyRoki的关键设计包括:1) 使用自动微分技术,方便用户定义复杂的代价函数。2) 采用稀疏矩阵技术,提高优化速度。3) 提供多种优化算法选择,如Levenberg-Marquardt算法、Dogleg算法等。4) 支持用户自定义优化算法。5) 提供了Python接口,方便用户进行开发和调试。
🖼️ 关键图片
📊 实验亮点
实验结果表明,PyRoki在运动重定向和规划任务中表现出色。在优化基准测试中,PyRoki比现有的GPU加速逆运动学库cuRobo快1.4-1.7倍,并且收敛到更低的误差。这表明PyRoki在优化速度和精度方面具有显著优势。
🎯 应用场景
PyRoki可应用于各种机器人运动规划和控制任务,例如工业机器人的轨迹规划、人机协作机器人的运动控制、医疗机器人的手术辅助等。其模块化和跨平台的设计使得它可以方便地集成到不同的机器人系统中,提高机器人的智能化水平和工作效率。未来,PyRoki有望成为机器人领域重要的基础工具库。
📄 摘要(原文)
Robot motion can have many goals. Depending on the task, we might optimize for pose error, speed, collision, or similarity to a human demonstration. Motivated by this, we present PyRoki: a modular, extensible, and cross-platform toolkit for solving kinematic optimization problems. PyRoki couples an interface for specifying kinematic variables and costs with an efficient nonlinear least squares optimizer. Unlike existing tools, it is also cross-platform: optimization runs natively on CPU, GPU, and TPU. In this paper, we present (i) the design and implementation of PyRoki, (ii) motion retargeting and planning case studies that highlight the advantages of PyRoki's modularity, and (iii) optimization benchmarking, where PyRoki can be 1.4-1.7x faster and converges to lower errors than cuRobo, an existing GPU-accelerated inverse kinematics library.