Contact-Aware Safety in Soft Robots Using High-Order Control Barrier and Lyapunov Functions
作者: Kiwan Wong, Maximilian Stölzle, Wei Xiao, Cosimo Della Santina, Daniela Rus, Gioele Zardini
分类: cs.RO, eess.SY
发布日期: 2025-05-05 (更新: 2025-10-17)
备注: 8 pages
期刊: K. Wong, M. Stölzle, W. Xiao, C. D. Santina, D. Rus and G. Zardini, "Contact-Aware Safety in Soft Robots Using High-Order Control Barrier and Lyapunov Functions," in IEEE Robotics and Automation Letters
💡 一句话要点
提出基于高阶控制屏障函数和李雅普诺夫函数的软体机器人接触安全控制框架
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 软体机器人 安全控制 控制屏障函数 李雅普诺夫函数 人机协作 碰撞检测 优化控制
📋 核心要点
- 软体机器人虽然具有材料柔顺性,但在追求更高精度、负载能力和速度的设计趋势下,以及刚性元件的引入,其潜在的伤害风险再次浮现。
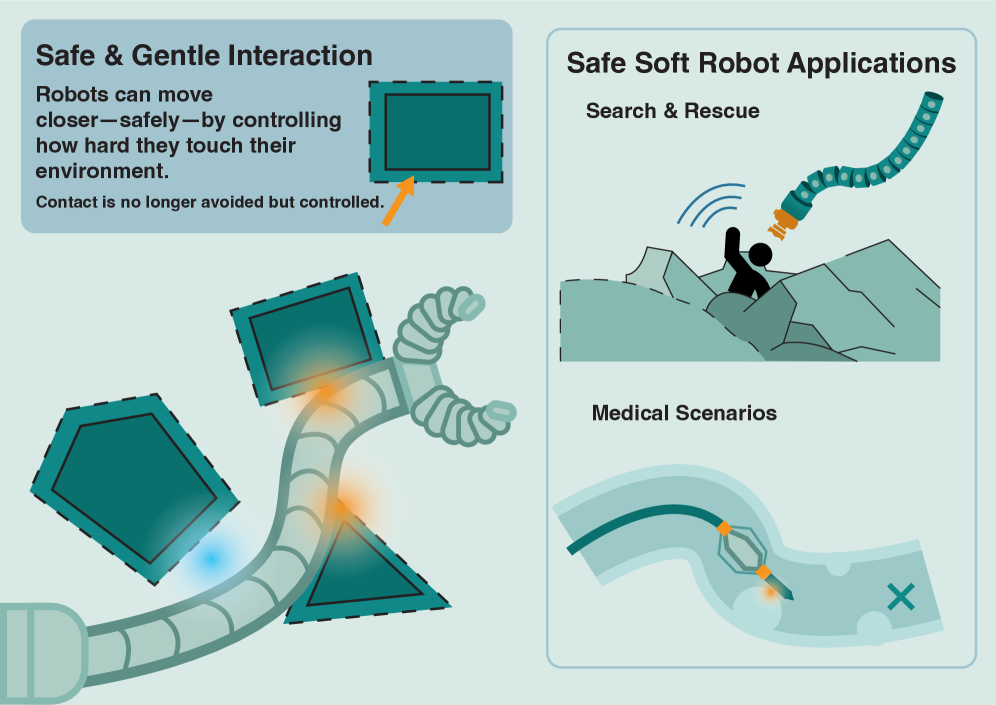
- 本文提出了一种基于高阶控制屏障函数(HOCBF)和高阶控制李雅普诺夫函数(HOCLF)的框架,以确保软体机器人在与环境交互时的接触力限制。
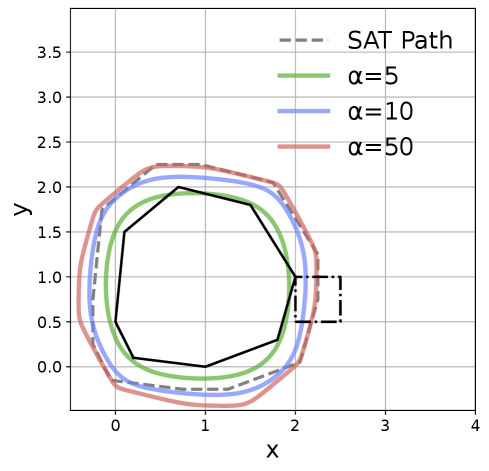
- 通过平面仿真验证,该方法能够在保证安全接触的前提下,实现软体机器人在形状和任务空间中的精确控制。
📝 摘要(中文)
为了保证软体机器人在人机协作环境中的安全性,尤其是在辅助老年人或与工人协同制造等场景中,本文提出了一种综合的高阶控制屏障函数(HOCBF)+高阶控制李雅普诺夫函数(HOCLF)框架,该框架能够在环境交互过程中,对整个软体机器人身体施加严格的接触力限制。该方法结合了可微分的分段科塞尔杆(PCS)动力学模型与基于软体机器人几何形状的可微分保守分离轴定理(DCSAT)凸多边形距离近似度量,从而实现实时的全身碰撞检测、解决和安全约束执行。通过将HOCBF嵌入到优化程序中,可以保证安全性,例如在HOCLF驱动的运动目标下安全地在操作空间中导航。大量的平面仿真表明,该方法在实现精确的形状和任务空间调节的同时,保持了安全范围内的接触。这项工作为在以人为中心的环境中部署具有可证明的安全性和性能的软体机器人奠定了基础。
🔬 方法详解
问题定义:现有软体机器人的控制方法难以在保证高性能的同时,确保与环境交互时的安全性,尤其是在人机协作场景中,如何限制接触力,避免潜在伤害是一个关键问题。现有的方法可能无法同时兼顾精确的运动控制和严格的安全约束。
核心思路:本文的核心思路是将安全约束建模为高阶控制屏障函数(HOCBF),并将其与高阶控制李雅普诺夫函数(HOCLF)相结合,通过优化方法,在满足安全约束的前提下,尽可能地实现期望的运动目标。这种方法能够显式地保证接触力在安全范围内,从而提高人机协作的安全性。
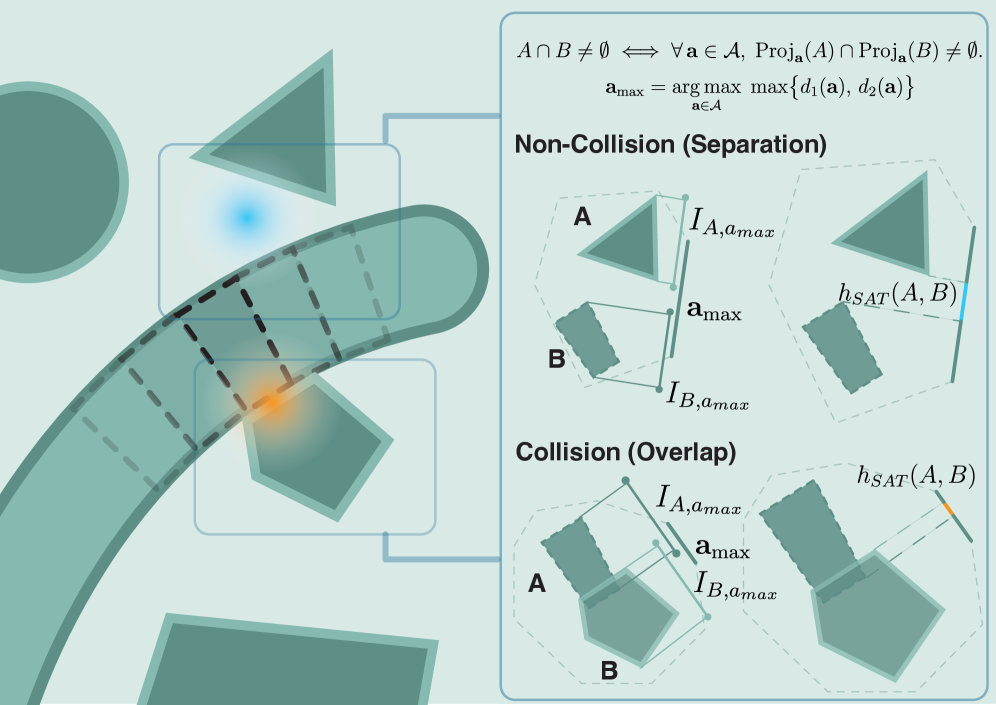
技术框架:该框架主要包含以下几个模块:1) 可微分的分段科塞尔杆(PCS)动力学模型,用于精确描述软体机器人的运动;2) 可微分保守分离轴定理(DCSAT),用于实时进行全身碰撞检测和距离估计;3) 高阶控制屏障函数(HOCBF),用于定义安全约束;4) 高阶控制李雅普诺夫函数(HOCLF),用于定义运动目标;5) 优化器,用于求解满足安全约束和运动目标的控制量。
关键创新:该方法最重要的创新在于将高阶控制屏障函数(HOCBF)应用于软体机器人的安全控制,并结合可微分的动力学模型和碰撞检测方法,实现了实时的安全约束执行。与传统的控制屏障函数相比,高阶控制屏障函数能够处理更高阶的系统动力学,从而更好地保证安全性。此外,DCSAT方法提供了一种可微分的碰撞检测和距离估计方法,使得安全约束可以方便地嵌入到优化框架中。
关键设计:DCSAT基于凸多边形近似软体机器人几何形状,计算机器人与环境之间的距离。HOCBF的设计需要考虑接触力的上限,并将其转化为对控制量的约束。HOCLF的设计则需要根据具体的运动目标进行调整。优化器的选择需要考虑实时性和求解效率,常用的选择包括二次规划等。具体参数设置需要根据实际的机器人和任务进行调整。
🖼️ 关键图片
📊 实验亮点
通过大量的平面仿真实验,验证了该方法在保证安全接触的前提下,能够实现软体机器人在形状和任务空间中的精确控制。实验结果表明,该方法能够有效地限制接触力在安全范围内,并实现期望的运动目标。具体的性能数据(例如接触力误差、位置跟踪误差等)未在摘要中给出,需要在论文正文中查找。
🎯 应用场景
该研究成果可应用于人机协作的各种场景,例如辅助老年人的日常活动、制造业中的人机协同装配、医疗康复机器人等。通过确保软体机器人在与人交互时的安全性,可以提高用户信任度,并促进软体机器人在实际应用中的推广。未来,该方法可以扩展到更复杂的软体机器人系统和更复杂的交互环境。
📄 摘要(原文)
Robots operating alongside people, particularly in sensitive scenarios such as aiding the elderly with daily tasks or collaborating with workers in manufacturing, must guarantee safety and cultivate user trust. Continuum soft manipulators promise safety through material compliance, but as designs evolve for greater precision, payload capacity, and speed, and increasingly incorporate rigid elements, their injury risk resurfaces. In this letter, we introduce a comprehensive High-Order Control Barrier Function (HOCBF) + High-Order Control Lyapunov Function (HOCLF) framework that enforces strict contact force limits across the entire soft-robot body during environmental interactions. Our approach combines a differentiable Piecewise Cosserat-Segment (PCS) dynamics model with a convex-polygon distance approximation metric, named Differentiable Conservative Separating Axis Theorem (DCSAT), based on the soft robot geometry to enable real-time, whole-body collision detection, resolution, and enforcement of the safety constraints. By embedding HOCBFs into our optimization routine, we guarantee safety, allowing, for instance, safe navigation in operational space under HOCLF-driven motion objectives. Extensive planar simulations demonstrate that our method maintains safety-bounded contacts while achieving precise shape and task-space regulation. This work thus lays a foundation for the deployment of soft robots in human-centric environments with provable safety and performance.