Dexterous Contact-Rich Manipulation via the Contact Trust Region
作者: H. J. Terry Suh, Tao Pang, Tong Zhao, Russ Tedrake
分类: cs.RO
发布日期: 2025-05-04 (更新: 2025-11-03)
期刊: International Journal of Robotics Research 2025
💡 一句话要点
提出接触信任域(CTR)方法,高效解决灵巧操作中的接触动力学建模与规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 灵巧操作 接触动力学 模型预测控制 接触信任域 机器人控制
📋 核心要点
- 现有方法在接触动力学建模中依赖泰勒近似和椭球信任域,未能充分考虑接触的单边特性,导致规划效果不佳。
- 提出接触信任域(CTR)方法,显式建模接触的单边性,并设计高效的MPC算法进行局部规划,再通过拼接实现全局规划。
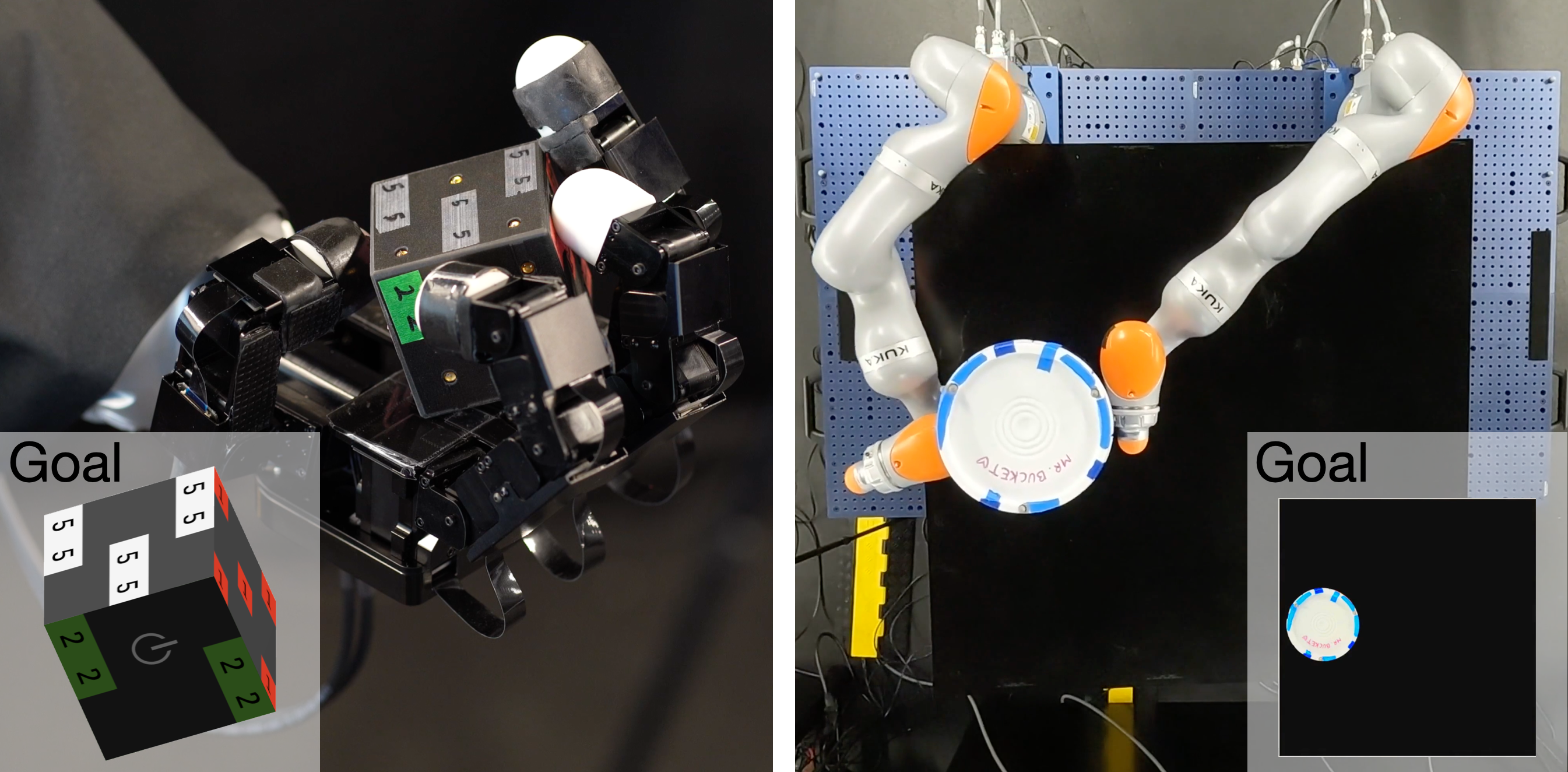
- 在IiwaBimanual和AllegroHand系统上的实验表明,该方法在计算效率上优于现有强化学习方法,且能实现复杂的灵巧操作。
📝 摘要(中文)
本文提出了一种用于接触丰富的灵巧操作的新方法,称为接触信任域(CTR)。针对现有方法依赖动力学泰勒近似和椭球信任域,与接触的单边性不一致的问题,CTR能够有效捕捉接触的单边特性,同时保持计算效率。基于CTR,本文首先开发了一种能够合成局部接触丰富规划的模型预测控制(MPC)算法。然后,通过拼接局部MPC规划,将此能力扩展到全局规划,从而实现高效且灵巧的接触丰富操作。在平面IiwaBimanual系统和3D AllegroHand系统上进行了高保真仿真和硬件实验,验证了该方法的性能。结果表明,该方法为现有的基于强化学习的接触丰富操作方法提供了一种计算量显著更低的替代方案。特别是,AllegroHand的灵巧操作策略,以路线图的形式,仅使用CPU在标准笔记本电脑上离线构建耗时不到10分钟,而在线推理仅需几秒钟。
🔬 方法详解
问题定义:论文旨在解决接触丰富的灵巧操作中的接触动力学建模与规划问题。现有方法,如基于泰勒展开的动力学近似和椭球信任域,无法准确描述接触的单边性,导致在接触力变化剧烈时,模型预测的准确性下降,进而影响规划效果。此外,直接使用高维动力学模型进行全局规划计算量巨大,难以实时应用。
核心思路:论文的核心思路是提出一种新的局部动力学描述方法,即接触信任域(CTR),它能够显式地建模接触的单边性,并在此基础上进行局部规划。通过将多个局部规划拼接起来,实现全局的灵巧操作。这种方法避免了直接对全局动力学进行建模和优化,从而降低了计算复杂度。
技术框架:整体框架包含两个主要阶段:1) 基于CTR的局部MPC规划:利用CTR对接触动力学进行局部近似,设计MPC算法生成局部操作轨迹。2) 全局规划:通过拼接多个局部MPC规划,构建全局操作策略,例如路线图。该框架允许离线构建全局策略,在线快速推理。
关键创新:最重要的技术创新点在于接触信任域(CTR)的提出。CTR与传统的椭球信任域不同,它显式地考虑了接触的单边性,能够更准确地描述接触动力学。此外,通过将局部MPC规划与全局规划相结合,实现了高效的接触丰富操作。
关键设计:CTR的具体形式未知,但其核心在于能够表达接触力的单边约束。MPC算法的设计需要考虑CTR的特性,例如,优化目标可能包含接触力相关的项,约束条件需要满足接触的单边性。全局规划中,如何选择和拼接局部MPC规划也是一个关键设计,可能涉及到图搜索算法或启发式策略。
🖼️ 关键图片

📊 实验亮点
论文在平面IiwaBimanual系统和3D AllegroHand系统上进行了实验验证。在AllegroHand的灵巧操作任务中,该方法仅使用CPU在标准笔记本电脑上离线构建策略耗时不到10分钟,而在线推理仅需几秒钟。这表明该方法在计算效率上显著优于现有的基于强化学习的方法,为接触丰富的灵巧操作提供了一种高效的解决方案。
🎯 应用场景
该研究成果可应用于机器人灵巧操作领域,例如工业装配、医疗手术、家庭服务等。通过该方法,机器人能够更稳定、更高效地完成需要复杂接触交互的任务,提高自动化水平和工作效率。未来,该方法有望扩展到更复杂的机器人系统和更广泛的应用场景。
📄 摘要(原文)
What is a good local description of contact dynamics for contact-rich manipulation, and where can we trust this local description? While many approaches often rely on the Taylor approximation of dynamics with an ellipsoidal trust region, we argue that such approaches are fundamentally inconsistent with the unilateral nature of contact. As a remedy, we present the Contact Trust Region (CTR), which captures the unilateral nature of contact while remaining efficient for computation. With CTR, we first develop a Model-Predictive Control (MPC) algorithm capable of synthesizing local contact-rich plans. Then, we extend this capability to plan globally by stitching together local MPC plans, enabling efficient and dexterous contact-rich manipulation. To verify the performance of our method, we perform comprehensive evaluations, both in high-fidelity simulation and on hardware, on two contact-rich systems: a planar IiwaBimanual system and a 3D AllegroHand system. On both systems, our method offers a significantly lower-compute alternative to existing RL-based approaches to contact-rich manipulation. In particular, our Allegro in-hand manipulation policy, in the form of a roadmap, takes fewer than 10 minutes to build offline on a standard laptop using just its CPU, with online inference taking just a few seconds. Experiment data, video and code are available at ctr.theaiinstitute.com.