Phasing Through the Flames: Rapid Motion Planning with the AGHF PDE for Arbitrary Objective Functions and Constraints
作者: Challen Enninful Adu, César E. Ramos Chuquiure, Yutong Zhou, Pearl Lin, Ruikai Yang, Bohao Zhang, Shubham Singh, Ram Vasudevan
分类: cs.RO
发布日期: 2025-05-02
备注: 15 pages, 5 figures
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
推广AGHF PDE:实现任意目标函数与约束下机器人快速运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 轨迹优化 仿射几何热流 偏微分方程 机器人控制 约束优化 高维系统
📋 核心要点
- 高维机器人系统在满足动力学可行性、输入限制和任务目标的同时进行轨迹优化,计算复杂度高。
- 推广AGHF PDE,使其能处理任意代价函数,并提出Phase1-Phase2算法,允许使用违反约束的初始轨迹。
- 实验表明,该方法在多种动力学系统和轨迹生成问题中,性能优于现有技术,验证了其有效性。
📝 摘要(中文)
针对高维机器人系统在约束下生成最优轨迹的计算挑战,本文对仿射几何热流(AGHF)偏微分方程(PDE)方法进行了推广。现有AGHF方法虽然能在数秒内为Digit V3人形机器人等复杂系统生成动态可行的轨迹,但仅限于最小化控制力平方积分的优化问题,且通常需要满足约束的初始猜测以保证收敛。本文通过推广AGHF公式以适应任意代价函数,显著扩展了可生成的轨迹类型。同时,引入Phase1-Phase2算法,允许使用违反约束的初始猜测,并保证令人满意的收敛性。通过在各种动力学系统和具有挑战性的轨迹生成问题中与最先进技术的比较评估,证明了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决高维机器人系统在复杂约束下进行最优轨迹生成的问题。现有的基于AGHF PDE的方法虽然高效,但其局限性在于只能处理特定类型的最优控制问题(即最小化控制力平方积分),并且对初始轨迹的约束满足性有较高要求,这限制了其在机器人轨迹生成中的应用。
核心思路:论文的核心思路是将AGHF PDE推广到可以处理任意代价函数的形式,从而能够优化更广泛的轨迹类型。此外,通过引入Phase1-Phase2算法,允许使用不满足约束的初始轨迹,从而提高了算法的鲁棒性和适用性。
技术框架:该方法包含两个主要阶段:Phase 1和Phase 2。Phase 1使用AGHF PDE演化初始轨迹,主要目标是快速收敛到一个接近可行解的轨迹,即使初始轨迹违反约束。Phase 2则进一步优化轨迹,使其满足所有约束并最小化目标函数。整个框架利用AGHF PDE的快速收敛特性,结合约束处理策略,实现高效的轨迹优化。
关键创新:最重要的技术创新在于AGHF PDE的通用化,使其能够处理任意代价函数。这使得该方法能够应用于更广泛的机器人轨迹优化问题,而不仅仅局限于最小化控制力。此外,Phase1-Phase2算法的引入,解决了对初始轨迹约束满足性的依赖问题,提高了算法的鲁棒性。
关键设计:AGHF PDE的通用化涉及到对PDE方程的修改,以适应不同的代价函数。Phase1-Phase2算法的关键在于设计合适的切换条件,以确保在Phase 1快速收敛到可行解附近,并在Phase 2精确满足约束并优化目标函数。具体的参数设置和损失函数的设计需要根据具体的机器人系统和任务进行调整。
🖼️ 关键图片

📊 实验亮点
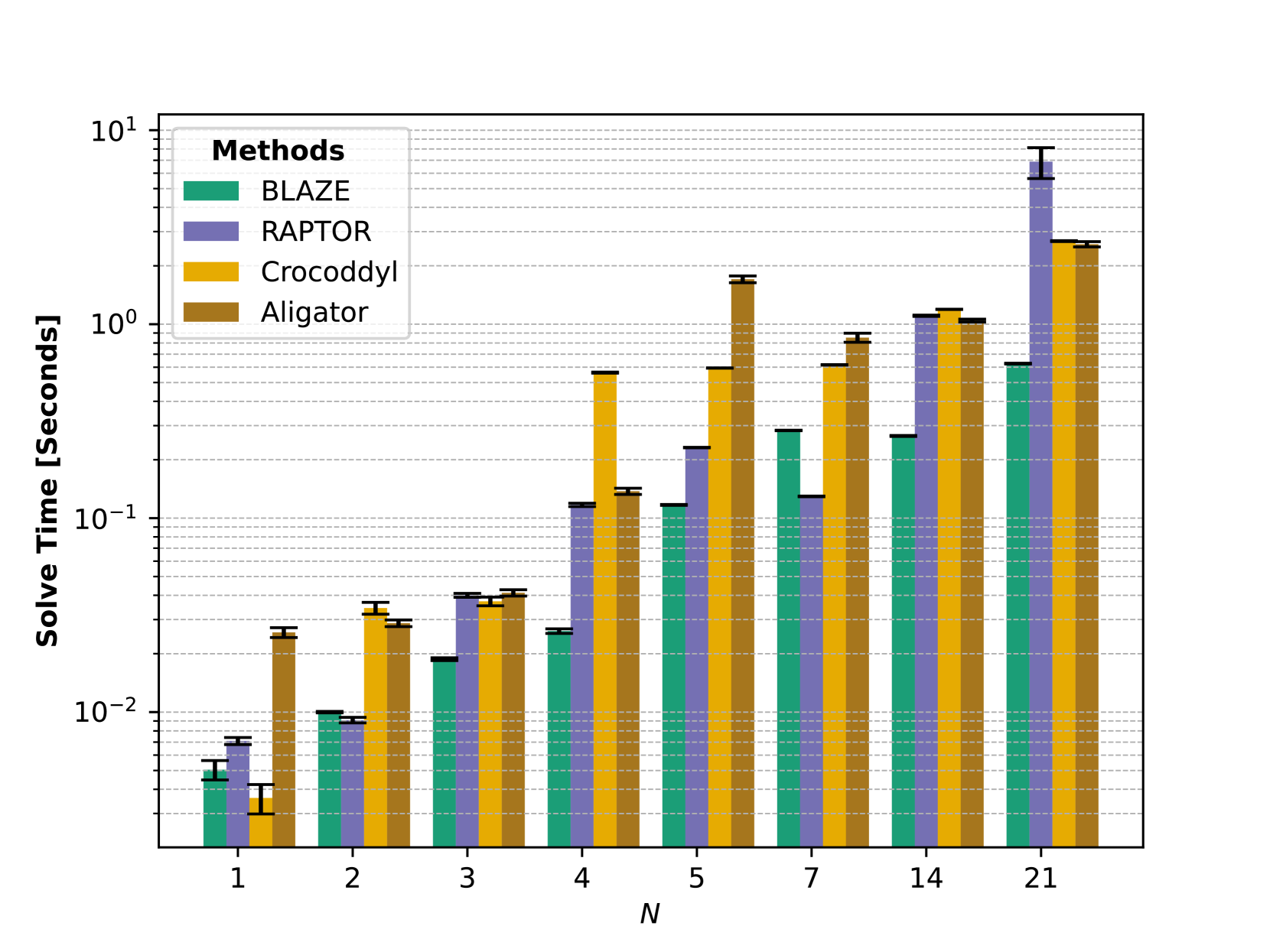
论文通过实验验证了所提出方法的有效性。在各种动力学系统和具有挑战性的轨迹生成问题中,该方法与现有技术进行了比较,结果表明,该方法能够生成满足约束且优化目标函数的轨迹,并且在收敛速度和鲁棒性方面优于现有方法。具体的性能数据和提升幅度在论文中有详细的展示。
🎯 应用场景
该研究成果可应用于各种机器人运动规划场景,例如人形机器人的复杂动作生成、自动驾驶车辆的轨迹优化、以及工业机器人的路径规划等。通过允许任意代价函数和约束,该方法能够生成更高效、更安全的机器人轨迹,提高机器人的自主性和适应性,具有重要的实际应用价值和未来发展潜力。
📄 摘要(原文)
The generation of optimal trajectories for high-dimensional robotic systems under constraints remains computationally challenging due to the need to simultaneously satisfy dynamic feasibility, input limits, and task-specific objectives while searching over high-dimensional spaces. Recent approaches using the Affine Geometric Heat Flow (AGHF) Partial Differential Equation (PDE) have demonstrated promising results, generating dynamically feasible trajectories for complex systems like the Digit V3 humanoid within seconds. These methods efficiently solve trajectory optimization problems over a two-dimensional domain by evolving an initial trajectory to minimize control effort. However, these AGHF approaches are limited to a single type of optimal control problem (i.e., minimizing the integral of squared control norms) and typically require initial guesses that satisfy constraints to ensure satisfactory convergence. These limitations restrict the potential utility of the AGHF PDE especially when trying to synthesize trajectories for robotic systems. This paper generalizes the AGHF formulation to accommodate arbitrary cost functions, significantly expanding the classes of trajectories that can be generated. This work also introduces a Phase1 - Phase 2 Algorithm that enables the use of constraint-violating initial guesses while guaranteeing satisfactory convergence. The effectiveness of the proposed method is demonstrated through comparative evaluations against state-of-the-art techniques across various dynamical systems and challenging trajectory generation problems. Project Page: https://roahmlab.github.io/BLAZE/