ASAP-MO:Advanced Situational Awareness and Perception for Mission-critical Operations
作者: Veronica Vannini, William Dubois, Olivier Gamache, Jean-Michel Fortin, Nicolas Samson, Effie Daum, François Pomerleau, Edith Brotherton
分类: cs.RO
发布日期: 2025-05-02 (更新: 2025-06-20)
备注: 6 pages + references, 7 figures, Presented at the 2025 IEEE ICRA Workshop on Field Robotics
💡 一句话要点
ASAP-MO:面向任务关键型操作的先进情境感知与理解
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人协同 遥操作 情境感知 核检查 无人地面车辆
📋 核心要点
- 现有机器人任务部署面临控制复杂、传感器融合困难以及通信延迟等挑战,尤其是在核检查等高危场景。
- 该研究通过整合机器人群能力,包括地图绘制、定位和远程通信,实现多机器人协同完成复杂任务。
- 通过模拟核检查场景,验证了异构机器人群在统一地图输出方面的可行性,并突出了操作挑战。
📝 摘要(中文)
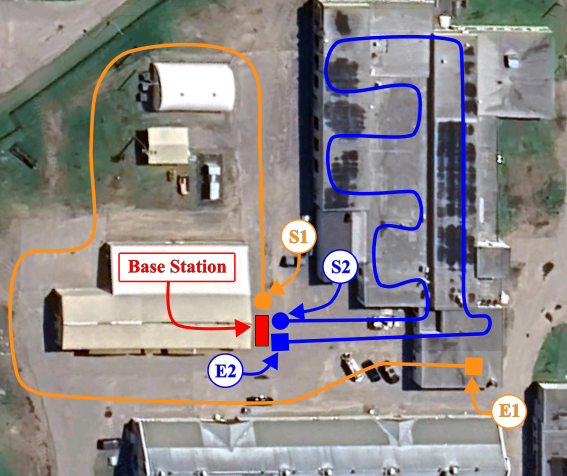
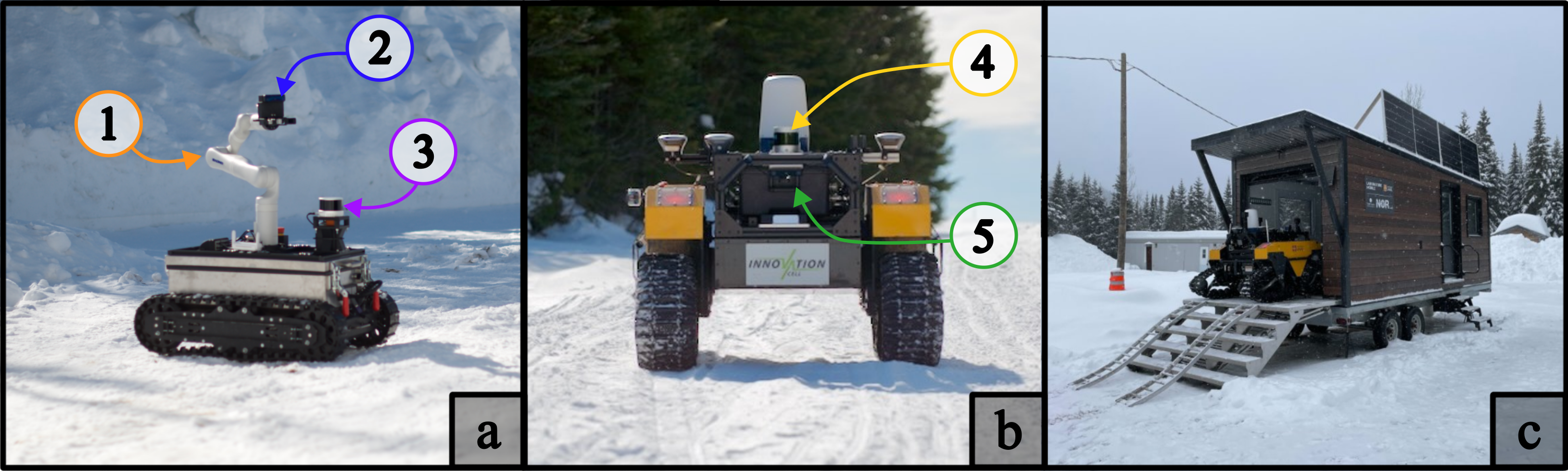
由于控制具有多自由度的机器人、融合多样化的传感器输入以及管理通信延迟和干扰的复杂性,部署机器人任务可能具有挑战性。在核检查中,机器人对于评估人类存在受限的环境至关重要,需要精确的遥操作和协调。遥操作需要大量的培训,因为操作员必须处理多个输出,同时确保与关键资产的安全交互。当跨多个环境操作异构机器人群时,这些挑战会加剧,因为每个机器人可能具有不同的控制界面、传感系统和操作约束。在这种设置中进行高效协调仍然是一个悬而未决的问题。本文介绍了一份关于我们如何整合机器人群能力(包括地图绘制、定位和远程通信)以实现联合任务的现场报告。我们模拟了一个用于暴露区域的核检查场景,使用灯光来表示辐射源。我们部署了两辆无人地面车辆 (UGV),负责绘制室内和室外环境的地图,同时从单个基站进行远程控制。尽管具有不同的操作目标,但机器人产生了统一的地图输出,证明了协调多机器人任务的可行性。我们的结果突出了关键的操作挑战,并提供了改进远程机器人部署中的适应性和情境感知方面的见解。
🔬 方法详解
问题定义:论文旨在解决在复杂和危险环境中,如何高效地部署和协调异构机器人群以完成任务的问题。现有方法在处理多自由度机器人控制、多样传感器数据融合以及通信延迟等方面存在不足,尤其是在核检查等任务关键型场景中,操作员需要处理大量信息并确保安全,难度极高。
核心思路:论文的核心思路是整合机器人群的各项能力,包括地图绘制、定位和远程通信,从而实现多机器人之间的协同工作。通过统一的地图输出,简化操作员的控制负担,提高任务效率和安全性。这种方法旨在克服单个机器人在复杂环境中的局限性,并充分利用多个机器人的优势。
技术框架:该研究的技术框架主要包括以下几个方面:首先,部署异构的无人地面车辆(UGV),分别负责室内和室外环境的地图绘制。其次,通过远程控制系统,操作员可以从单个基站对机器人进行控制。最后,通过数据融合和协同算法,将各个机器人采集的数据整合到统一的地图输出中。整个流程旨在模拟真实的核检查场景,并验证多机器人协同工作的可行性。
关键创新:该研究的关键创新在于实现了异构机器人群的协同工作,并生成统一的地图输出。这种方法简化了操作员的控制负担,提高了任务效率和安全性。此外,该研究还突出了在实际部署中可能遇到的操作挑战,并为改进远程机器人部署的适应性和情境感知提供了有价值的见解。
关键设计:在实验设计方面,研究人员模拟了一个核检查场景,使用灯光代表辐射源。两辆UGV分别负责室内和室外环境的地图绘制,并通过远程控制系统进行操作。研究人员重点关注如何将各个机器人采集的数据整合到统一的地图输出中,并评估了操作员在控制多个机器人时的表现。具体的参数设置、损失函数和网络结构等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
该研究成功地部署了两辆异构UGV,在模拟核检查场景中实现了室内和室外环境的地图绘制,并生成了统一的地图输出。实验结果表明,多机器人协同工作能够有效地完成复杂任务,并为改进远程机器人部署的适应性和情境感知提供了有价值的见解。具体的性能数据和提升幅度在论文中未明确给出。
🎯 应用场景
该研究成果可应用于核电站检查、灾难救援、环境监测等高危或复杂环境中,通过多机器人协同作业,提高任务效率和安全性,降低人员风险。未来可进一步扩展到更广泛的机器人应用领域,例如智能制造、物流仓储等。
📄 摘要(原文)
Deploying robotic missions can be challenging due to the complexity of controlling robots with multiple degrees of freedom, fusing diverse sensory inputs, and managing communication delays and interferences. In nuclear inspection, robots can be crucial in assessing environments where human presence is limited, requiring precise teleoperation and coordination. Teleoperation requires extensive training, as operators must process multiple outputs while ensuring safe interaction with critical assets. These challenges are amplified when operating a fleet of heterogeneous robots across multiple environments, as each robot may have distinct control interfaces, sensory systems, and operational constraints. Efficient coordination in such settings remains an open problem. This paper presents a field report on how we integrated robot fleet capabilities - including mapping, localization, and telecommunication - toward a joint mission. We simulated a nuclear inspection scenario for exposed areas, using lights to represent a radiation source. We deployed two Unmanned Ground Vehicles (UGVs) tasked with mapping indoor and outdoor environments while remotely controlled from a single base station. Despite having distinct operational goals, the robots produced a unified map output, demonstrating the feasibility of coordinated multi-robot missions. Our results highlight key operational challenges and provide insights into improving adaptability and situational awareness in remote robotic deployments.