DexFlow: A Unified Approach for Dexterous Hand Pose Retargeting and Interaction
作者: Xiaoyi Lin, Kunpeng Yao, Lixin Xu, Xueqiang Wang, Xuetao Li, Yuchen Wang, Miao Li
分类: cs.RO
发布日期: 2025-05-02
💡 一句话要点
DexFlow:一种用于灵巧手姿态重定向和交互的统一方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 灵巧手 姿态重定向 手-物体交互 数据驱动 时间一致性
📋 核心要点
- 现有方法在灵巧手操作数据生成方面存在精度低、忽略手-物体交互等问题,导致结果不自然。
- DexFlow结合多源数据,利用微分损失约束保证时间一致性,并生成接触图优化手-物体交互。
- 实验表明,该方法显著提升了姿势精度、自然性和多样性,为手-物体交互建模提供了有效方案。
📝 摘要(中文)
尽管手-物体交互建模取得了进展,但为机器人手生成逼真的灵巧操作数据仍然是一个挑战。重定向方法通常精度较低,并且未能考虑手-物体交互,导致诸如相互穿透之类的伪影。生成方法缺乏人类手部的先验知识,产生有限且不自然的姿势。我们提出了一种数据转换流程,该流程结合了来自多个来源的人手和物体数据,以实现高精度重定向。我们的方法使用微分损失约束来确保时间一致性,并生成接触图以细化手-物体交互。实验表明,我们的方法显着提高了姿势精度、自然性和多样性,为手-物体交互建模提供了一个强大的解决方案。
🔬 方法详解
问题定义:论文旨在解决为机器人手生成逼真灵巧操作数据的问题。现有重定向方法精度不足,无法有效处理手与物体的交互,导致穿透等不自然现象。而生成式方法由于缺乏人类手部运动的先验知识,生成的手部姿态有限且不自然。
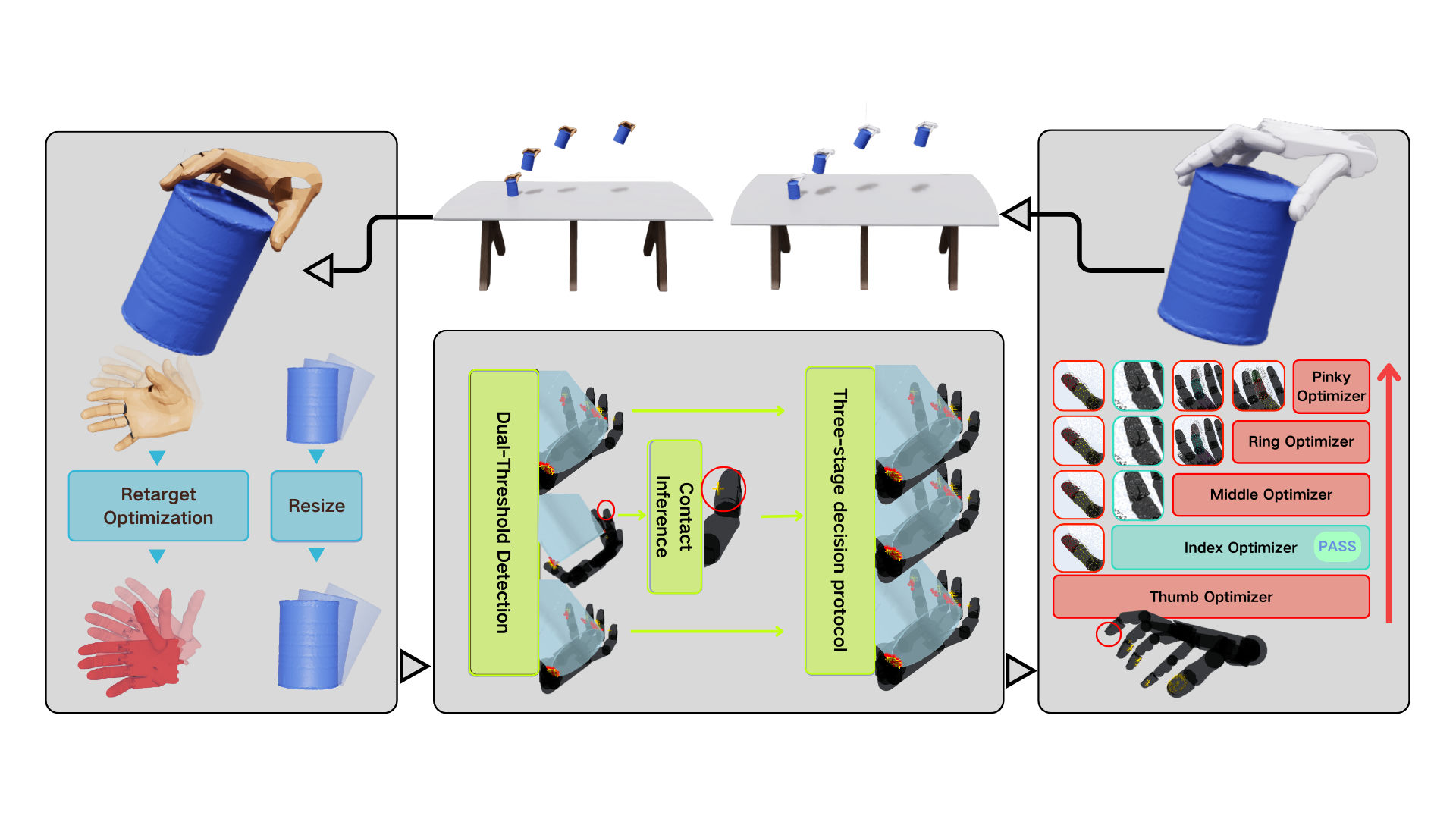
核心思路:论文的核心思路是结合多源数据,利用数据转换流程实现高精度的手部姿态重定向。通过引入微分损失约束来保证生成姿态的时间一致性,并利用接触图来细化手与物体之间的交互,从而生成更自然、逼真的手部操作数据。
技术框架:DexFlow包含以下主要模块:1) 数据收集与预处理:从多个来源收集人手和物体数据,并进行预处理;2) 姿态重定向:将人手姿态重定向到机器人手;3) 时间一致性优化:使用微分损失约束保证姿态序列的时间一致性;4) 接触图生成与优化:生成手与物体的接触图,并利用其优化手部姿态,使其更符合物理规律。
关键创新:该方法的主要创新在于:1) 结合多源数据进行高精度重定向;2) 引入微分损失约束保证时间一致性;3) 利用接触图细化手-物体交互。这些创新使得生成的手部姿态更加逼真、自然。
关键设计:微分损失约束的具体形式未知,但其目的是惩罚相邻帧之间姿态的突变,从而保证时间一致性。接触图的生成和优化方式也未知,但其目的是确保手与物体之间的交互符合物理规律,避免穿透等不自然现象。
🖼️ 关键图片


📊 实验亮点
实验结果表明,DexFlow在姿势精度、自然性和多样性方面均优于现有方法。具体性能数据未知,但摘要强调了“显著提高”,表明该方法在关键指标上取得了实质性进展。通过结合多源数据和优化策略,DexFlow为手-物体交互建模提供了一个更强大的解决方案。
🎯 应用场景
该研究成果可应用于机器人灵巧操作、虚拟现实、人机交互等领域。通过生成逼真的手部操作数据,可以提升机器人操作的智能化水平,改善虚拟现实的沉浸感,并为更自然的人机交互提供支持。未来,该方法有望应用于工业自动化、医疗康复等领域。
📄 摘要(原文)
Despite advances in hand-object interaction modeling, generating realistic dexterous manipulation data for robotic hands remains a challenge. Retargeting methods often suffer from low accuracy and fail to account for hand-object interactions, leading to artifacts like interpenetration. Generative methods, lacking human hand priors, produce limited and unnatural poses. We propose a data transformation pipeline that combines human hand and object data from multiple sources for high-precision retargeting. Our approach uses a differential loss constraint to ensure temporal consistency and generates contact maps to refine hand-object interactions. Experiments show our method significantly improves pose accuracy, naturalness, and diversity, providing a robust solution for hand-object interaction modeling.