Tightly Coupled Range Inertial Odometry and Mapping with Exact Point Cloud Downsampling
作者: Kenji Koide, Aoki Takanose, Shuji Oishi, Masashi Yokozuka
分类: cs.RO
发布日期: 2025-05-02
备注: IEEE International Conference on Robotics and Automation (ICRA2025)
💡 一句话要点
提出基于coreset提取的精确点云降采样算法,实现实时紧耦合激光惯性里程计与建图
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 激光雷达SLAM 点云降采样 Coreset提取 实时性 因子图优化
📋 核心要点
- 现有基于因子图的SLAM方法在处理大规模点云时计算量大,难以实现实时性。
- 提出一种基于coreset提取的点云降采样算法,保证降采样后的误差函数与原始点云完全一致。
- 构建了完整的SLAM框架,在标准CPU上实现了实时里程计估计和全局轨迹优化,性能优于现有CPU-based SLAM方法。
📝 摘要(中文)
本文旨在促进因子图上多扫描配准误差最小化的实时处理,设计了一种基于coreset提取的点云降采样算法。该算法提取输入点残差的子集,使得该子集对于给定的位姿,产生与原始集合完全相同的二次误差函数。这使得在采样点处无需近似误差的情况下,显著减少需要评估的残差数量。利用该算法,我们设计了一个完整的SLAM框架,该框架包括基于滑动窗口优化的里程计估计和基于整个地图上配准误差最小化的全局轨迹优化,两者都可以在标准CPU上实时运行。实验结果表明,所提出的框架优于最先进的基于CPU的SLAM框架,而无需使用GPU加速。
🔬 方法详解
问题定义:论文旨在解决激光雷达SLAM中,大规模点云数据处理带来的计算负担问题。现有的点云降采样方法通常会引入近似误差,影响SLAM的精度和一致性,或者计算复杂度仍然较高,难以满足实时性要求。
核心思路:论文的核心思路是利用coreset提取技术,找到原始点云的一个具有代表性的子集(coreset),使得这个子集在计算位姿优化目标函数时,与原始点云具有完全相同的二次误差函数。这样,就可以在不损失精度的情况下,显著减少计算量。
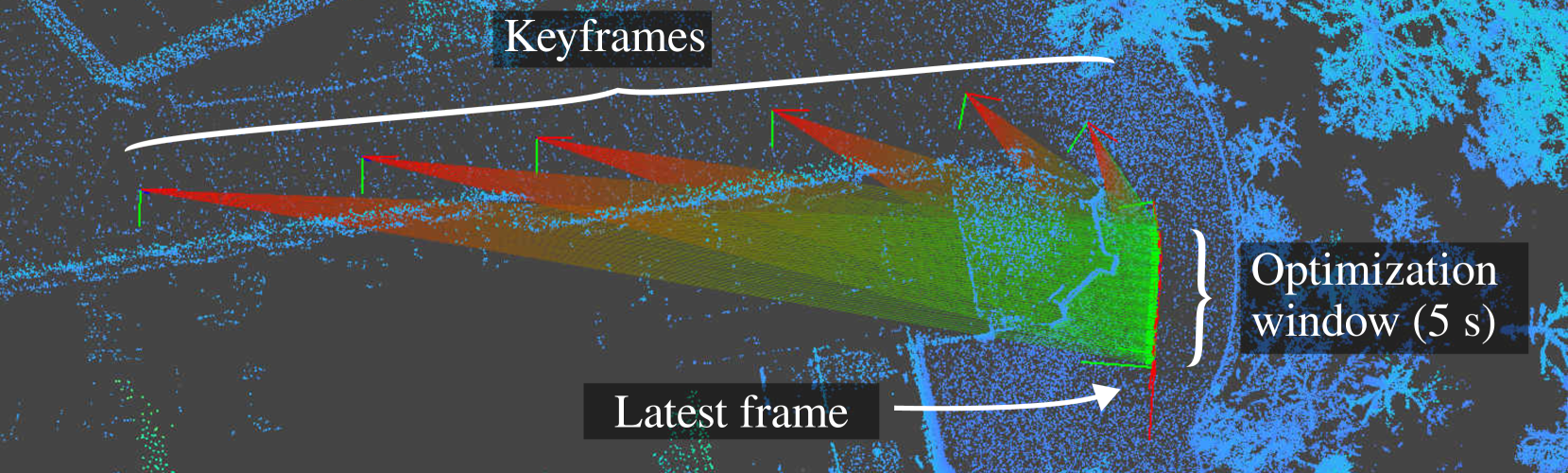
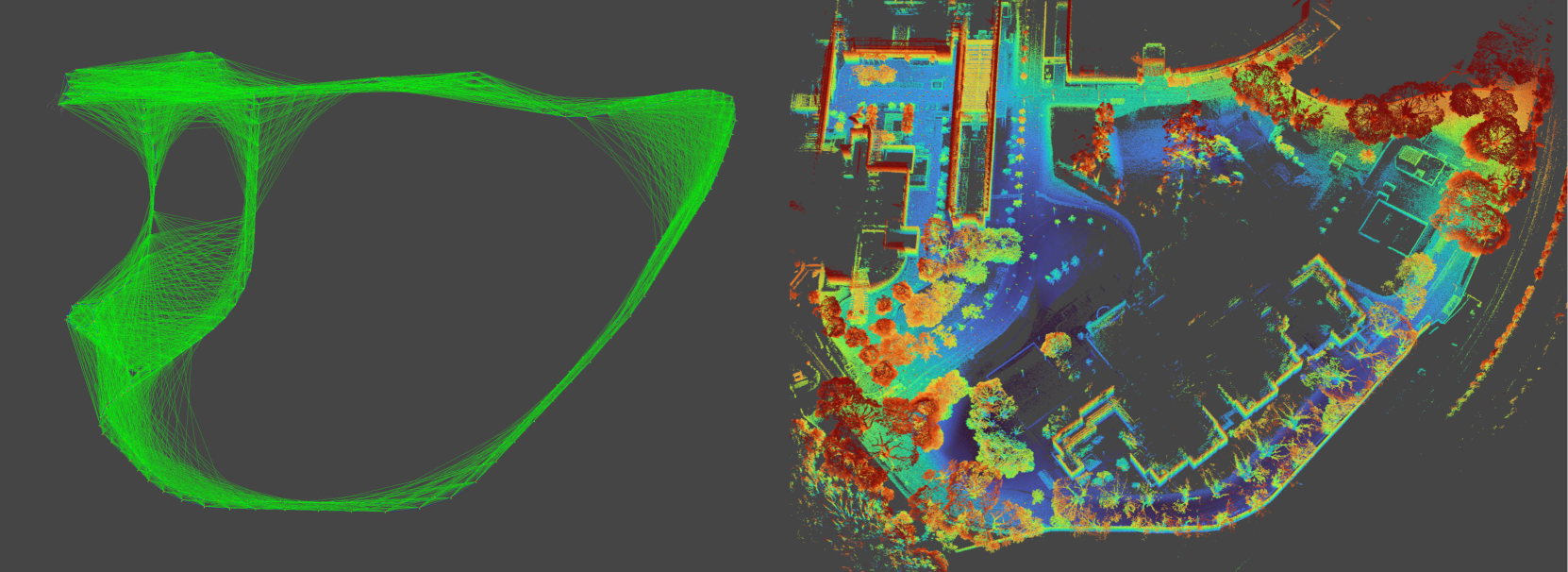
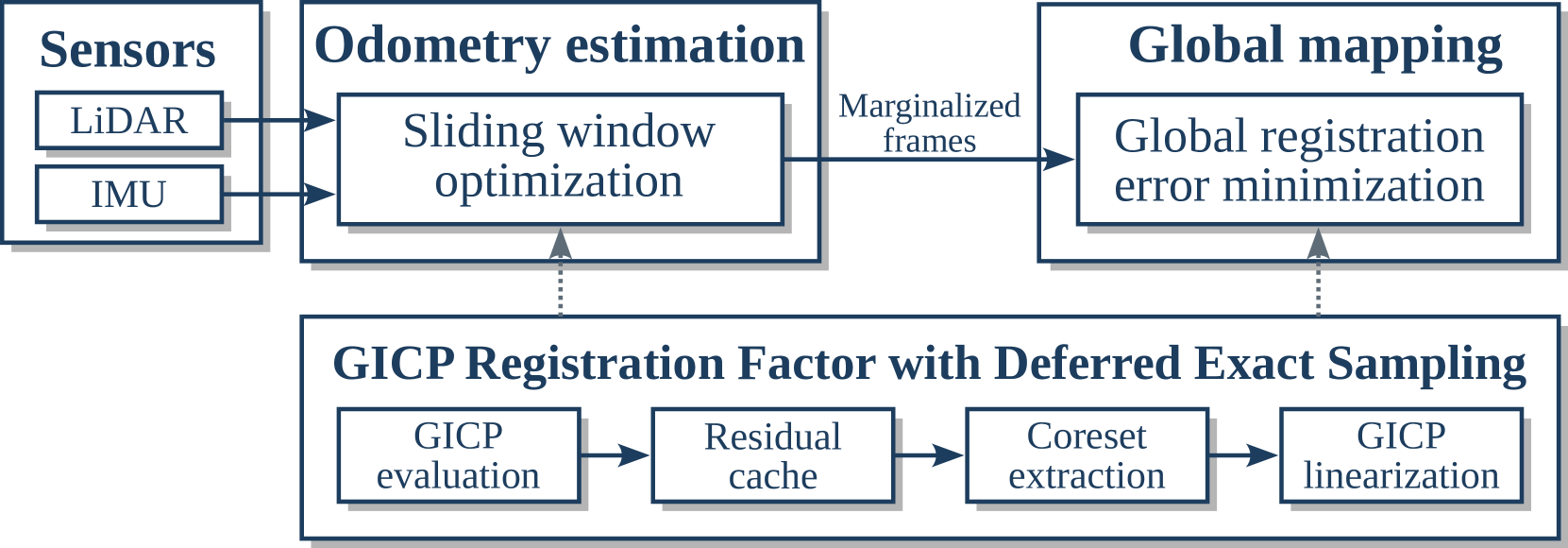
技术框架:该SLAM框架包含两个主要模块:1) 基于滑动窗口优化的里程计估计:利用IMU预积分和降采样后的点云进行局部地图构建和位姿估计;2) 基于全局配准误差最小化的全局轨迹优化:利用所有关键帧的降采样点云进行全局地图优化,消除累积误差。这两个模块都可以在标准CPU上实时运行。
关键创新:论文最关键的创新在于提出的精确点云降采样算法。该算法基于coreset提取,保证了降采样后的点云与原始点云在位姿优化目标函数上等价,避免了近似误差。这是与传统点云降采样方法(如体素滤波、随机采样)的本质区别。
关键设计:论文中coreset提取算法的具体实现细节未知,但可以推测其目标是最小化降采样后点云的数量,同时保证二次误差函数不变。损失函数的设计目标是使得降采样后的点云能够精确地代表原始点云的几何结构,从而保证SLAM的精度。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该框架在标准CPU上实现了实时SLAM,并且在精度上优于现有的CPU-based SLAM框架。具体性能数据未知,但论文强调了在没有GPU加速的情况下,仍然能够达到state-of-the-art的性能,这突显了该方法的效率和实用性。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、无人机等领域,尤其适用于计算资源受限的平台。通过降低点云处理的计算复杂度,可以提高SLAM系统的实时性和鲁棒性,从而实现更可靠的定位和地图构建。未来,该方法有望扩展到更大规模、更复杂的环境,并与其他传感器融合,进一步提升SLAM系统的性能。
📄 摘要(原文)
In this work, to facilitate the real-time processing of multi-scan registration error minimization on factor graphs, we devise a point cloud downsampling algorithm based on coreset extraction. This algorithm extracts a subset of the residuals of input points such that the subset yields exactly the same quadratic error function as that of the original set for a given pose. This enables a significant reduction in the number of residuals to be evaluated without approximation errors at the sampling point. Using this algorithm, we devise a complete SLAM framework that consists of odometry estimation based on sliding window optimization and global trajectory optimization based on registration error minimization over the entire map, both of which can run in real time on a standard CPU. The experimental results demonstrate that the proposed framework outperforms state-of-the-art CPU-based SLAM frameworks without the use of GPU acceleration.