Autonomous Embodied Agents: When Robotics Meets Deep Learning Reasoning
作者: Roberto Bigazzi
分类: cs.RO, cs.AI, cs.CV
发布日期: 2025-05-02
备注: Ph.D. Dissertation
💡 一句话要点
面向室内环境,构建基于深度学习推理的自主具身智能体
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 自主机器人 深度学习 强化学习 模拟训练
📋 核心要点
- 现有方法在构建自主机器人时,难以兼顾安全性、效率和真实环境的复杂性。
- 论文提出一种完整的具身智能体创建流程,从概念设计到模拟训练再到实际部署。
- 通过在逼真的3D模拟环境中训练智能体,可以安全高效地评估和改进其行为。
📝 摘要(中文)
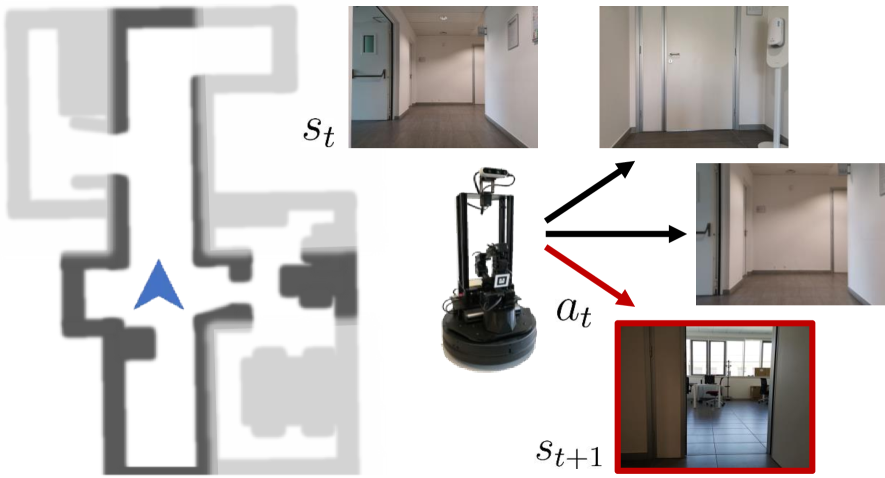
计算能力的提升和深度学习的革命推动了人工智能研究的新领域探索。具身人工智能(Embodied AI)位于计算机视觉、机器人和决策制定的交叉点,近年来日益重要,旨在促进智能自主机器人的开发及其在社会中的部署。大量逼真的3D模型使得基于学习的智能体能够在模拟环境中进行数百万帧的快速和安全训练,并在部署到真实机器人平台之前仔细评估其行为。这些智能体旨在在可能未知的环境中执行特定任务。为此,在模拟训练期间,智能体学习与周围环境进行持续交互,例如从环境中收集信息,编码和提取有用的线索以完成任务,并执行行动以实现最终目标;智能体的每个行动都会影响交互。本论文涵盖了室内环境具身智能体的完整创建过程,从概念到实现和部署。旨在为具身人工智能和自主智能体的研究做出贡献,以促进该领域的未来工作。论文详细分析了实现智能具身智能体的过程,包括对当前文献的全面描述,对所提出方法的技术解释以及对相关机器人任务的准确实验研究。
🔬 方法详解
问题定义:论文旨在解决如何构建能够在室内环境中自主完成任务的具身智能体。现有方法通常难以在真实环境中进行充分的训练和测试,并且在安全性方面存在挑战。此外,如何让智能体有效地与环境交互,提取有用的信息并做出合理的决策也是一个关键问题。
核心思路:论文的核心思路是利用大规模的3D模型构建逼真的模拟环境,在模拟环境中训练智能体,然后将训练好的模型部署到真实的机器人平台上。通过模拟训练,智能体可以学习与环境交互,提取有用的信息,并做出合理的决策。这种方法可以避免在真实环境中进行危险或昂贵的实验,并且可以加速智能体的开发过程。
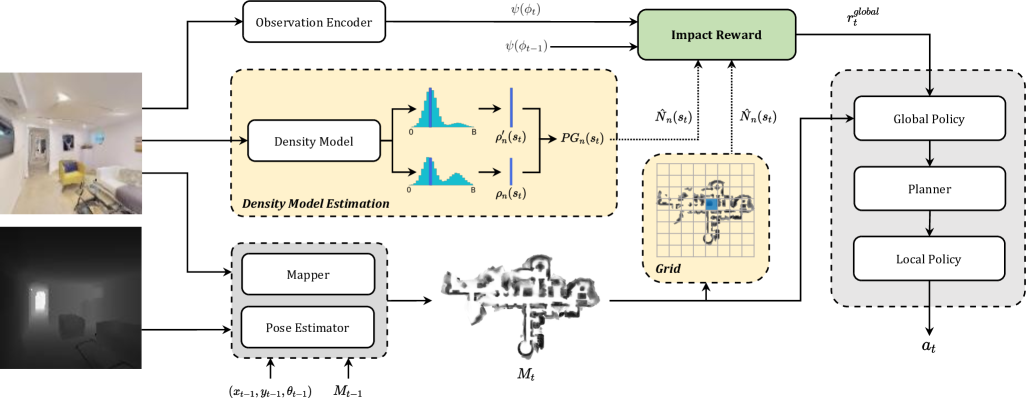
技术框架:整体框架包括以下几个主要模块:1) 3D环境建模:利用大规模的3D模型构建逼真的室内环境。2) 智能体设计:设计智能体的感知、决策和行动模块。3) 模拟训练:在模拟环境中训练智能体,使其学习与环境交互并完成任务。4) 模型部署:将训练好的模型部署到真实的机器人平台上。
关键创新:论文的关键创新在于提出了一种完整的具身智能体创建流程,该流程涵盖了从概念设计到模拟训练再到实际部署的各个环节。此外,论文还利用大规模的3D模型构建逼真的模拟环境,为智能体的训练提供了良好的基础。
关键设计:论文中涉及的关键设计包括:1) 智能体的感知模块:使用深度学习模型从环境中提取视觉信息。2) 智能体的决策模块:使用强化学习算法训练智能体做出合理的决策。3) 智能体的行动模块:控制机器人的运动,使其与环境交互。具体的参数设置、损失函数、网络结构等技术细节在论文中进行了详细描述(未知)。
🖼️ 关键图片
📊 实验亮点
论文通过在模拟环境中进行大量的实验,验证了所提出方法的有效性。具体的性能数据、对比基线、提升幅度等信息在摘要中未提及,因此具体实验亮点未知。但可以推断,实验结果表明,通过模拟训练,智能体可以有效地学习与环境交互,并完成指定的任务。
🎯 应用场景
该研究成果可应用于各种室内环境下的自主机器人,例如家庭服务机器人、商场导购机器人、仓库物流机器人等。这些机器人可以自主地完成各种任务,例如清洁、导航、搬运物品等,从而提高工作效率和服务质量。未来,该技术还可以应用于更复杂的场景,例如灾难救援、医疗辅助等。
📄 摘要(原文)
The increase in available computing power and the Deep Learning revolution have allowed the exploration of new topics and frontiers in Artificial Intelligence research. A new field called Embodied Artificial Intelligence, which places at the intersection of Computer Vision, Robotics, and Decision Making, has been gaining importance during the last few years, as it aims to foster the development of smart autonomous robots and their deployment in society. The recent availability of large collections of 3D models for photorealistic robotic simulation has allowed faster and safe training of learning-based agents for millions of frames and a careful evaluation of their behavior before deploying the models on real robotic platforms. These intelligent agents are intended to perform a certain task in a possibly unknown environment. To this end, during the training in simulation, the agents learn to perform continuous interactions with the surroundings, such as gathering information from the environment, encoding and extracting useful cues for the task, and performing actions towards the final goal; where every action of the agent influences the interactions. This dissertation follows the complete creation process of embodied agents for indoor environments, from their concept to their implementation and deployment. We aim to contribute to research in Embodied AI and autonomous agents, in order to foster future work in this field. We present a detailed analysis of the procedure behind implementing an intelligent embodied agent, comprehending a thorough description of the current state-of-the-art in literature, technical explanations of the proposed methods, and accurate experimental studies on relevant robotic tasks.