TeLoGraF: Temporal Logic Planning via Graph-encoded Flow Matching
作者: Yue Meng, Chuchu Fan
分类: cs.RO, cs.AI, cs.FL, cs.LG
发布日期: 2025-05-01
备注: Accepted to ICML2025
🔗 代码/项目: GITHUB
💡 一句话要点
TeLoGraF:利用图编码流匹配学习时序逻辑规划,提升复杂任务解决能力。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 时序逻辑规划 图神经网络 流匹配 机器人控制 任务规划
📋 核心要点
- 现有方法在解决具有信号时序逻辑(STL)规范的复杂任务时,缺乏多样化的STL数据集和有效的编码器来提取时序逻辑信息。
- TeLoGraF利用图神经网络(GNN)编码器和流匹配,学习通用STL规范的解决方案,无需针对特定任务进行调整。
- 实验结果表明,TeLoGraF在STL满足率上优于其他基线,推理速度提升10-100倍,并对分布外STL规范具有鲁棒性。
📝 摘要(中文)
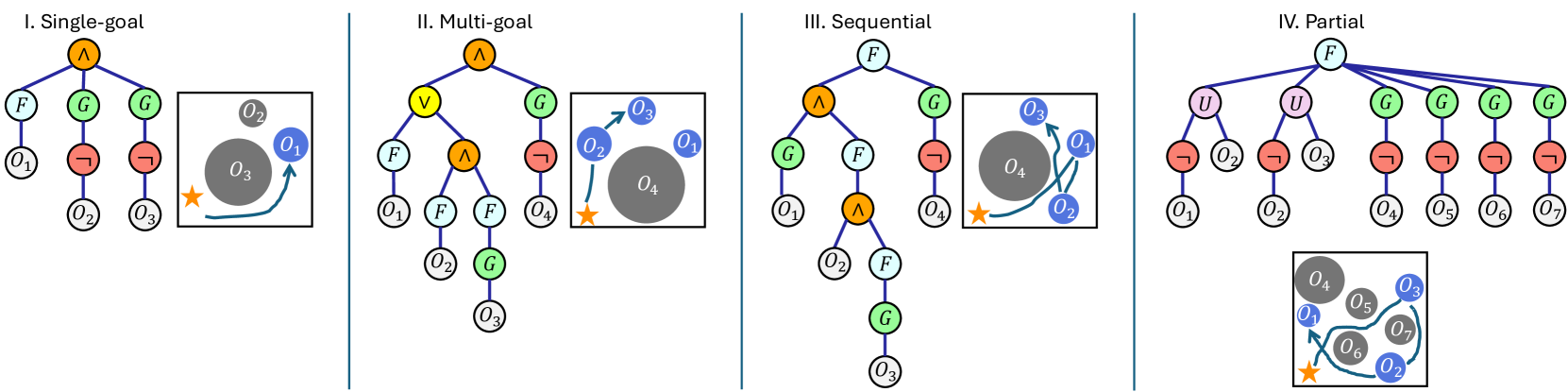
本文提出了一种名为TeLoGraF(Temporal Logic Graph-encoded Flow)的方法,该方法利用图神经网络(GNN)编码器和流匹配来学习通用信号时序逻辑(STL)规范的解决方案。作者构建了一个包含20万个STL规范及其对应演示的数据集,这些规范基于四种常用的STL模板。在五个模拟环境中进行了广泛的实验,涵盖了从二维空间中的简单动力学模型到高维7自由度Franka Panda机器人手臂和Ant四足机器人导航。实验结果表明,该方法在STL满足率方面优于其他基线方法。与经典STL规划算法相比,该方法在推理速度上提高了10-100倍,并且可以适用于任何系统动力学。此外,该图编码方法还展现了解决复杂STL的能力以及对分布外STL规范的鲁棒性。
🔬 方法详解
问题定义:现有基于STL规范的任务规划方法,通常只能处理固定或参数化的STL规范,泛化能力不足。主要原因是缺乏足够多样化的STL数据集,以及能够有效提取时序逻辑信息的编码器,导致难以适应复杂的、未知的STL规范。
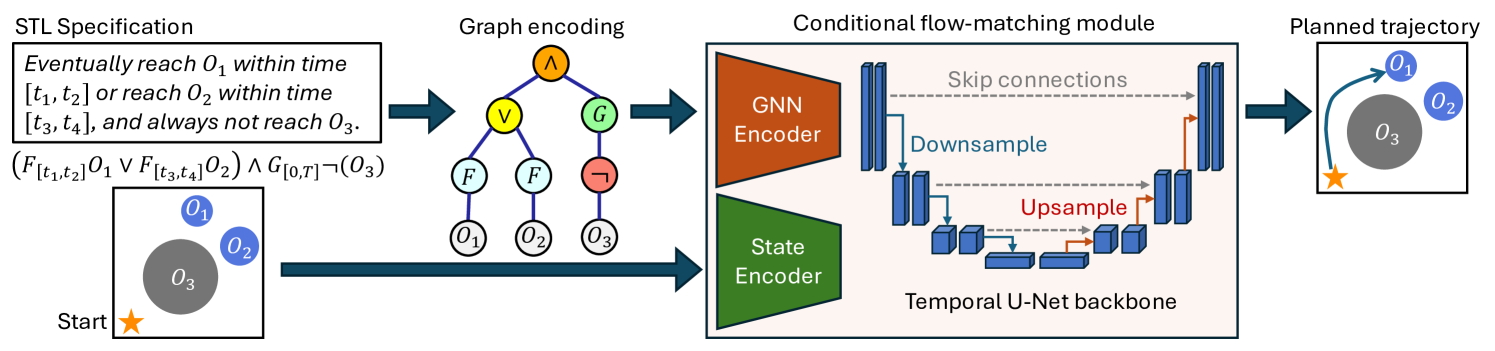
核心思路:TeLoGraF的核心思路是将STL规范编码为图结构,利用图神经网络(GNN)提取时序逻辑信息,然后通过流匹配学习从初始状态到满足STL规范的轨迹。这种方法将STL规范的复杂性转化为图结构的表示学习问题,从而能够处理更通用的STL规范。
技术框架:TeLoGraF包含两个主要模块:图编码器和流匹配模块。首先,将STL规范解析为抽象语法树,并将其转换为图结构。然后,使用图神经网络(GNN)编码器提取图结构的特征表示。最后,使用流匹配模块学习从初始状态到目标状态的连续映射,该映射能够生成满足STL规范的轨迹。整体流程为:STL规范 -> 图结构 -> GNN编码 -> 轨迹生成。
关键创新:TeLoGraF的关键创新在于使用图神经网络(GNN)来编码STL规范。与传统的基于字符串或向量的编码方法相比,图结构能够更自然地表示STL规范的层次结构和时序关系。此外,流匹配方法能够学习连续的轨迹生成策略,避免了传统规划算法的离散搜索过程,从而提高了推理速度。
关键设计:论文中使用了四种常用的STL模板来生成数据集。GNN编码器采用消息传递机制,学习节点和边的特征表示。流匹配模块使用神经网络来近似连续的向量场,并通过最小化流匹配损失来训练网络。具体损失函数的设计未知,但应与STL的满足程度相关。
🖼️ 关键图片

📊 实验亮点
实验结果表明,TeLoGraF在五个模拟环境中均优于其他基线方法,包括经典的STL规划算法和基于深度学习的方法。在STL满足率方面,TeLoGraF取得了显著的提升。此外,TeLoGraF的推理速度比经典STL规划算法快10-100倍,并且对分布外STL规范具有较强的鲁棒性。这些结果表明,TeLoGraF是一种高效且通用的STL规划方法。
🎯 应用场景
TeLoGraF具有广泛的应用前景,例如机器人导航、自动驾驶、任务调度等领域。它可以用于生成满足复杂时序约束的运动轨迹或行为策略,提高系统的自主性和可靠性。此外,该方法还可以应用于形式化验证和系统安全等领域,用于验证系统是否满足给定的时序逻辑规范。
📄 摘要(原文)
Learning to solve complex tasks with signal temporal logic (STL) specifications is crucial to many real-world applications. However, most previous works only consider fixed or parametrized STL specifications due to the lack of a diverse STL dataset and encoders to effectively extract temporal logic information for downstream tasks. In this paper, we propose TeLoGraF, Temporal Logic Graph-encoded Flow, which utilizes Graph Neural Networks (GNN) encoder and flow-matching to learn solutions for general STL specifications. We identify four commonly used STL templates and collect a total of 200K specifications with paired demonstrations. We conduct extensive experiments in five simulation environments ranging from simple dynamical models in the 2D space to high-dimensional 7DoF Franka Panda robot arm and Ant quadruped navigation. Results show that our method outperforms other baselines in the STL satisfaction rate. Compared to classical STL planning algorithms, our approach is 10-100X faster in inference and can work on any system dynamics. Besides, we show our graph-encoding method's capability to solve complex STLs and robustness to out-distribution STL specifications. Code is available at https://github.com/mengyuest/TeLoGraF