J-PARSE: Jacobian-based Projection Algorithm for Resolving Singularities Effectively in Inverse Kinematic Control of Serial Manipulators
作者: Shivani Guptasarma, Matthew Strong, Honghao Zhen, Monroe Kennedy
分类: cs.RO
发布日期: 2025-05-01 (更新: 2025-11-09)
备注: 18 pages, 25 figures. v1: Fig. 1 replaced with faster-loading version. v2: Website at https://jparse-manip.github.io/. v3: Proofs revised and new material added
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
J-PARSE:一种基于雅可比矩阵投影的串联机械臂逆运动学奇异性规避算法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 逆运动学 奇异性规避 雅可比矩阵 机器人控制 串联机械臂
📋 核心要点
- 传统逆运动学方法在奇异点附近失效,导致机械臂控制不稳定或运动受限,难以保证任务完成。
- J-PARSE算法通过构建“安全”雅可比矩阵,并对奇异方向的速度进行衰减,从而避免奇异性,保证控制的平滑性。
- 实验表明,J-PARSE算法在奇异点附近具有更高的控制精度和稳定性,能够有效扩展机械臂的工作空间。
📝 摘要(中文)
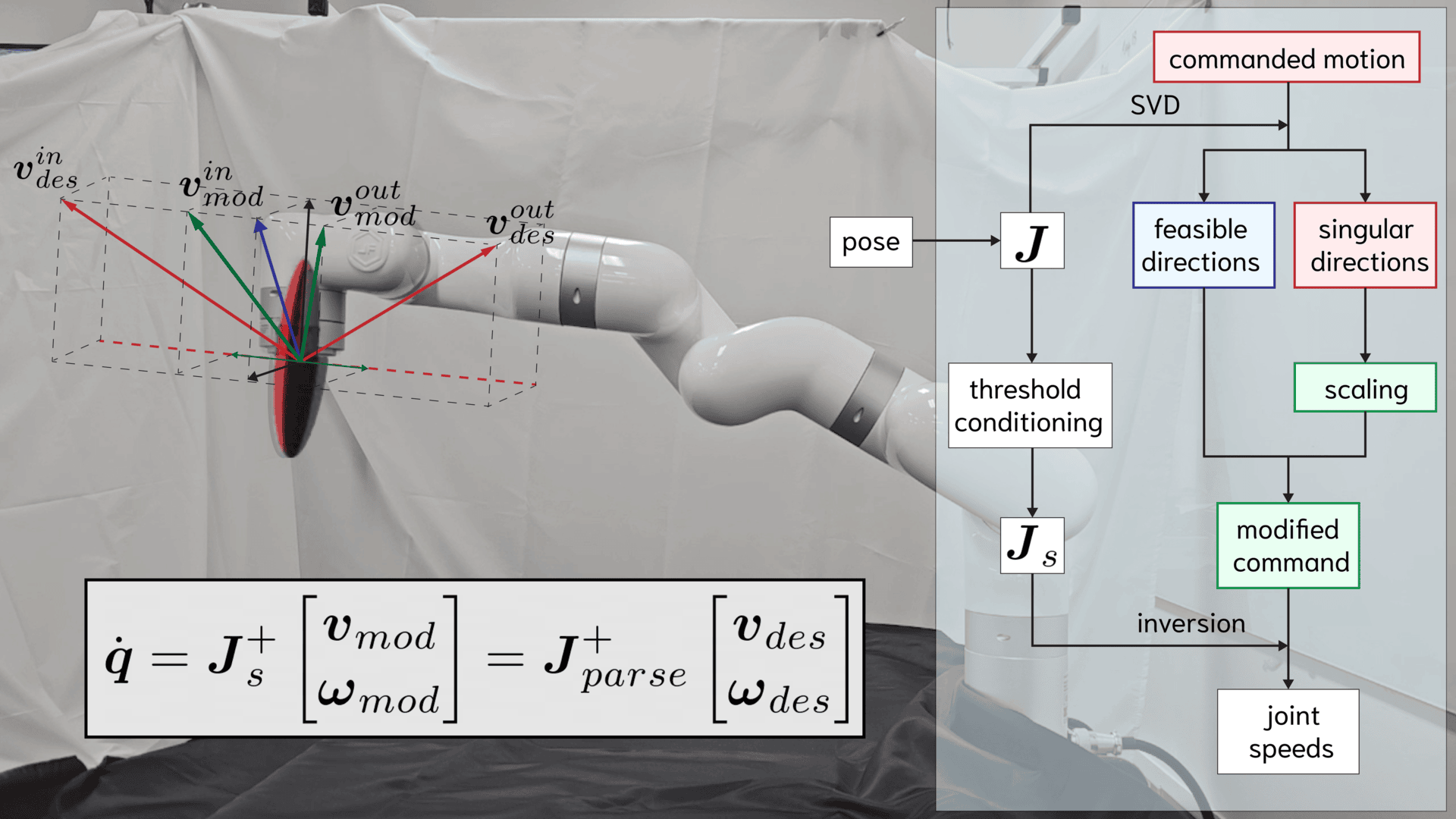
J-PARSE是一种用于串联机械臂在运动学奇异点附近进行平滑一阶逆运动学控制的算法。该算法根据末端执行器在任务空间每个维度上的可用自由度,分量式地解析期望的末端执行器速度。首先,创建一个替代的“安全”雅可比矩阵,保持操作椭球的纵横比高于阈值。然后,将期望的运动投影到非奇异和奇异方向上,并将后者的投影按一个由阈值决定的因子缩小。将非奇异安全雅可比矩阵的右逆应用于修改后的指令。在没有关节限制和碰撞的情况下,这确保了安全地进入和离开低秩配置,保证了在工作空间内到达目标姿态的渐近稳定性,以及在工作空间外姿态的稳定性。J-PARSE的速度控制与文献中的方法进行了基准测试,并在到达和离开奇异目标姿态时表现出高精度。通过扩展机械臂的可用工作空间,该算法在遥操作、伺服和学习中找到了应用。代码和视频可在https://jparse-manip.github.io/ 获取。
🔬 方法详解
问题定义:论文旨在解决串联机械臂在接近运动学奇异点时,传统逆运动学控制方法失效的问题。这些方法通常会导致关节速度过大、控制不稳定,甚至无法完成任务。现有的奇异性规避方法往往会牺牲控制精度或限制机械臂的运动范围。
核心思路:J-PARSE的核心思路是构建一个“安全”雅可比矩阵,该矩阵通过限制操作椭球的纵横比来避免奇异性。同时,将期望的末端执行器速度分解为非奇异方向和奇异方向,并对奇异方向的速度进行衰减,从而保证控制的平滑性和稳定性。
技术框架:J-PARSE算法主要包含以下几个步骤:1. 计算当前雅可比矩阵。2. 构建“安全”雅可比矩阵,确保操作椭球的纵横比高于预设阈值。3. 将期望的末端执行器速度投影到非奇异和奇异方向上。4. 对奇异方向的速度进行衰减。5. 使用“安全”雅可比矩阵的右逆计算关节速度。
关键创新:J-PARSE的关键创新在于“安全”雅可比矩阵的构建和奇异方向速度的衰减策略。通过限制操作椭球的纵横比,可以有效地避免奇异性,同时保证机械臂的运动能力。奇异方向速度的衰减策略则保证了控制的平滑性和稳定性。与现有方法相比,J-PARSE能够在奇异点附近实现更高的控制精度和更大的工作空间。
关键设计:算法的关键参数是操作椭球纵横比的阈值。该阈值的选择需要在奇异性规避和运动能力之间进行权衡。论文中可能提供了选择该阈值的经验法则或自适应方法。此外,奇异方向速度的衰减因子也需要仔细设计,以保证控制的平滑性和稳定性。具体实现细节需要参考论文原文。
🖼️ 关键图片
📊 实验亮点
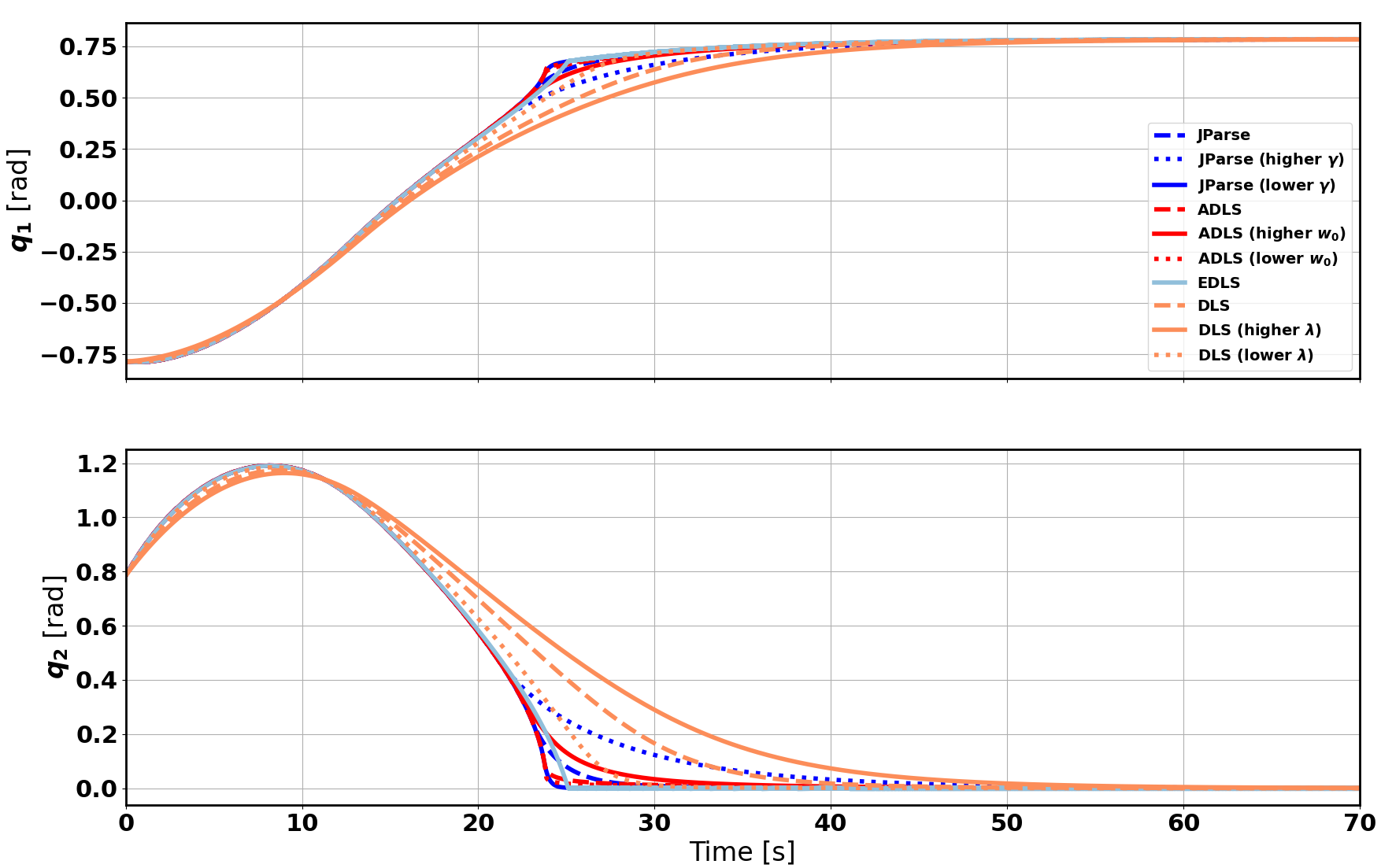
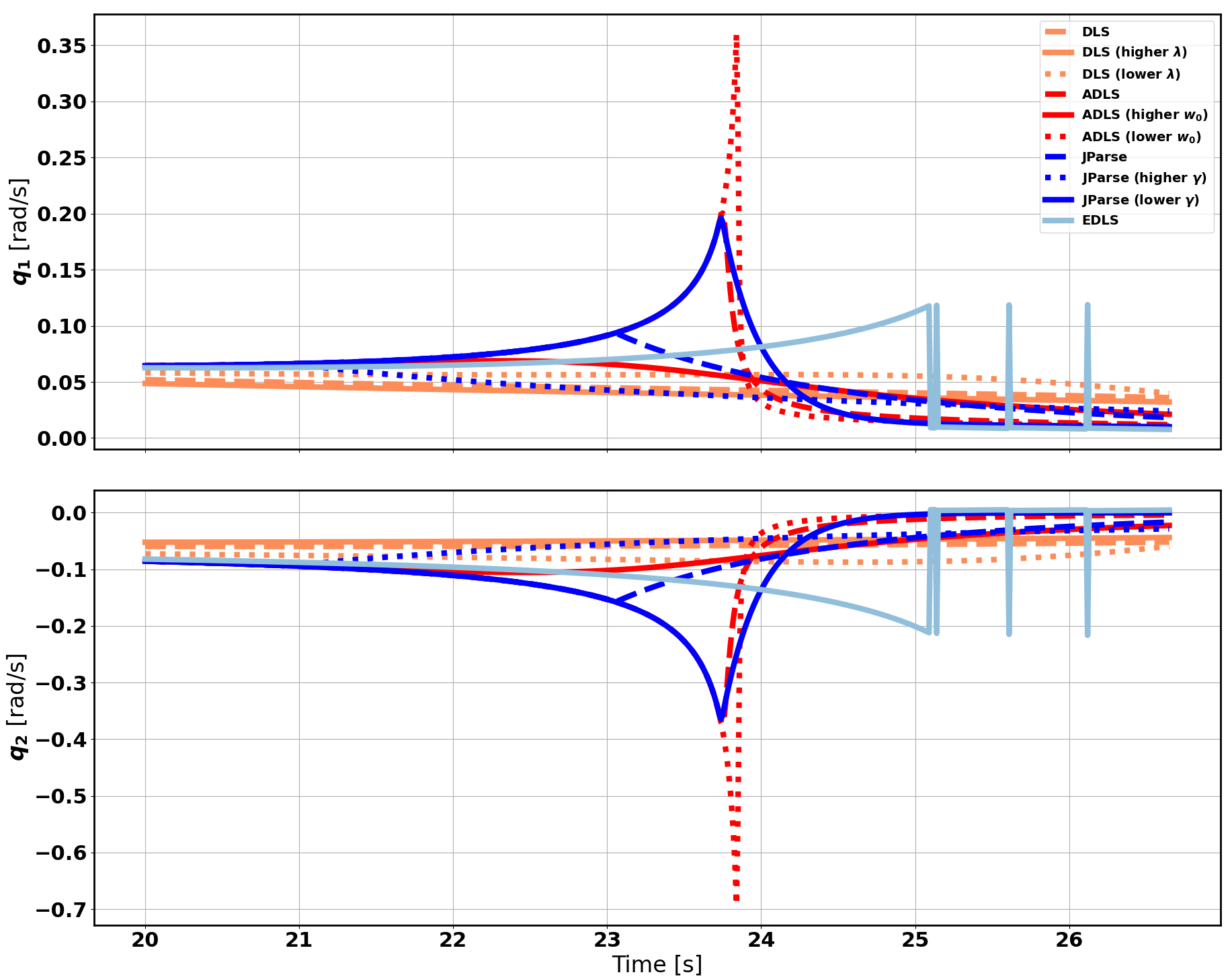
J-PARSE算法与现有方法进行了基准测试,结果表明,在到达和离开奇异目标姿态时,J-PARSE算法具有更高的控制精度。具体而言,J-PARSE算法在奇异点附近的定位误差明显低于其他方法,并且能够更平滑地过渡到奇异配置。这些结果表明,J-PARSE算法能够有效地扩展机械臂的工作空间,并提高其在复杂环境中的适应性。
🎯 应用场景
J-PARSE算法可应用于遥操作、伺服控制和机器人学习等领域。在遥操作中,该算法可以提高操作员在复杂环境中的控制精度和安全性。在伺服控制中,可以实现更精确的运动控制。在机器人学习中,可以帮助机器人更好地探索和利用其工作空间。该算法的实际价值在于提高机械臂的可靠性和易用性,扩展其应用范围。
📄 摘要(原文)
J-PARSE is an algorithm for smooth first-order inverse kinematic control of a serial manipulator near kinematic singularities. The commanded end-effector velocity is interpreted component-wise, according to the available mobility in each dimension of the task space. First, a substitute "Safety" Jacobian matrix is created, keeping the aspect ratio of the manipulability ellipsoid above a threshold value. The desired motion is then projected onto non-singular and singular directions, and the latter projection scaled down by a factor informed by the threshold value. A right-inverse of the non-singular Safety Jacobian is applied to the modified command. In the absence of joint limits and collisions, this ensures safe transition into and out of low-rank configurations, guaranteeing asymptotic stability for reaching target poses within the workspace, and stability for those outside. Velocity control with J-PARSE is benchmarked against approaches from the literature, and shows high accuracy in reaching and leaving singular target poses. By expanding the available workspace of manipulators, the algorithm finds applications in teleoperation, servoing, and learning. Videos and code are available at https://jparse-manip.github.io/.