Investigating Adaptive Tuning of Assistive Exoskeletons Using Offline Reinforcement Learning: Challenges and Insights
作者: Yasin Findik, Christopher Coco, Reza Azadeh
分类: cs.RO
发布日期: 2025-04-30
备注: Accepted to International Conference on Ubiquitous Robots (IEEE UR 2025)
💡 一句话要点
利用离线强化学习自适应调节辅助外骨骼:挑战与启示
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 辅助外骨骼 离线强化学习 多智能体系统 自适应控制 混合Q函数
📋 核心要点
- 现有辅助外骨骼依赖手动校准,难以实现个性化和自适应的参数调整。
- 提出基于离线强化学习的多智能体系统,优化外骨骼的努力阈值,实现数据驱动的自适应控制。
- 实验表明该方法能动态调整阈值,潜在改善用户交互和控制,但受限于数据集质量。
📝 摘要(中文)
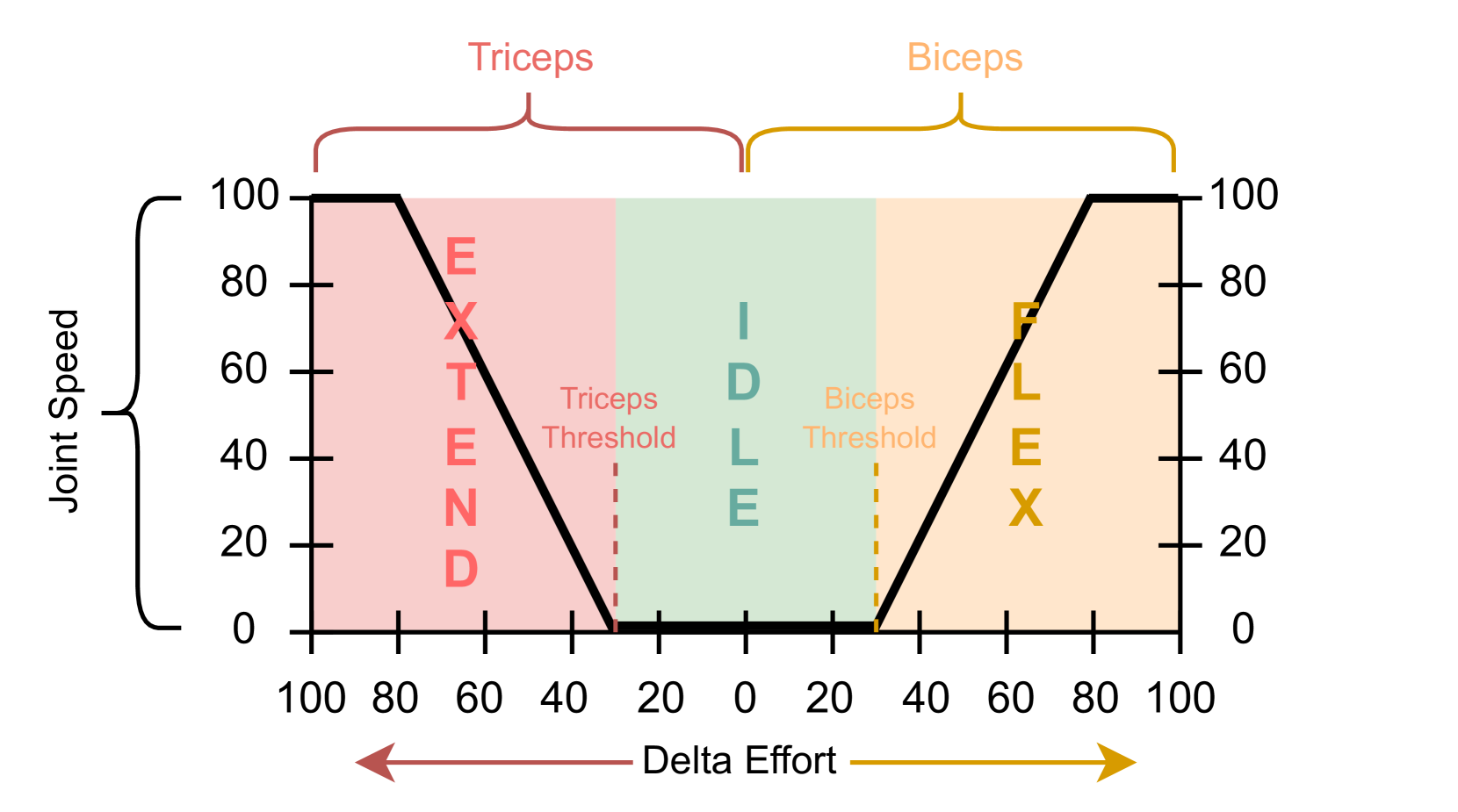
辅助外骨骼在增强运动障碍人士的行动能力方面显示出巨大潜力,但其有效性依赖于针对个性化辅助的精确参数调整。本研究探讨了离线强化学习在优化上肢辅助外骨骼的努力阈值方面的潜力,旨在减少对人工校准的依赖。具体而言,我们将问题构建为一个多智能体系统,其中独立的智能体优化肱二头肌和肱三头肌的努力阈值,从而实现更具适应性和数据驱动的外骨骼控制方法。采用混合Q函数(MQF)来有效处理连续动作空间,同时利用预先收集的数据,从而减轻与实时探索相关的风险。实验使用MyoPro 2外骨骼,涉及水平和垂直手臂运动两种不同的任务。结果表明,该方法可以根据学习到的模式动态调整阈值,从而可能改善用户交互和控制,但由于数据集的限制,性能评估仍然具有挑战性。
🔬 方法详解
问题定义:论文旨在解决上肢辅助外骨骼中,人工校准努力阈值效率低、难以个性化的问题。现有方法依赖于手动调整,无法根据用户的实时状态和任务需求进行自适应优化,导致辅助效果受限。
核心思路:论文的核心思路是将外骨骼的控制问题建模为多智能体强化学习问题,每个智能体负责优化一个肌肉群(如肱二头肌、肱三头肌)的努力阈值。通过离线强化学习,利用预先收集的数据训练智能体,避免了在线探索的风险,并实现了数据驱动的自适应控制。
技术框架:整体框架包含数据收集、离线强化学习训练和控制策略部署三个阶段。首先,通过传感器收集用户在使用外骨骼时的运动数据。然后,利用收集到的数据,采用混合Q函数(MQF)算法训练多智能体系统,学习最优的努力阈值策略。最后,将训练好的策略部署到外骨骼控制器中,实现自适应的辅助控制。
关键创新:最重要的技术创新点在于将多智能体强化学习与离线强化学习相结合,用于解决外骨骼的自适应控制问题。与传统的单智能体方法相比,多智能体系统能够更精细地控制不同的肌肉群,实现更个性化的辅助效果。与在线强化学习相比,离线强化学习避免了在真实环境中进行探索的风险,提高了安全性和效率。
关键设计:论文采用混合Q函数(MQF)算法来处理连续动作空间。MQF通过混合多个Q函数来估计Q值,从而提高了学习的稳定性和效率。此外,论文还设计了合适的奖励函数,鼓励智能体学习到能够减少用户努力的策略。具体的参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,所提出的方法能够根据学习到的模式动态调整阈值,潜在改善用户交互和控制。虽然论文中没有给出具体的性能数据和对比基线,但强调了该方法在自适应控制方面的潜力。由于数据集的限制,性能评估仍然具有挑战性,未来需要更大规模、更高质量的数据集来验证该方法的有效性。
🎯 应用场景
该研究成果可应用于上肢辅助外骨骼的自适应控制,为运动障碍人士提供更个性化、更高效的辅助。通过数据驱动的优化,可以减少对人工校准的依赖,提高外骨骼的使用便捷性和舒适性。未来,该方法还可扩展到下肢外骨骼、康复机器人等领域,具有广阔的应用前景。
📄 摘要(原文)
Assistive exoskeletons have shown great potential in enhancing mobility for individuals with motor impairments, yet their effectiveness relies on precise parameter tuning for personalized assistance. In this study, we investigate the potential of offline reinforcement learning for optimizing effort thresholds in upper-limb assistive exoskeletons, aiming to reduce reliance on manual calibration. Specifically, we frame the problem as a multi-agent system where separate agents optimize biceps and triceps effort thresholds, enabling a more adaptive and data-driven approach to exoskeleton control. Mixed Q-Functionals (MQF) is employed to efficiently handle continuous action spaces while leveraging pre-collected data, thereby mitigating the risks associated with real-time exploration. Experiments were conducted using the MyoPro 2 exoskeleton across two distinct tasks involving horizontal and vertical arm movements. Our results indicate that the proposed approach can dynamically adjust threshold values based on learned patterns, potentially improving user interaction and control, though performance evaluation remains challenging due to dataset limitations.