Tensegrity-based Robot Leg Design with Variable Stiffness
作者: Erik Mortensen, Jan Petrs, Alexander Dittrich, Dario Floreano
分类: cs.RO
发布日期: 2025-04-28
💡 一句话要点
提出基于张拉整体结构的变刚度机器人腿部设计,提升机器人腿的适应性和抗冲击能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿式机器人 张拉整体结构 变刚度 机器人腿部设计 柔顺性 抗冲击 主动刚度控制
📋 核心要点
- 现有的腿式机器人在适应复杂地形和吸收冲击方面,缺乏动物运动控制中精细的刚度调节能力。
- 该论文提出了一种基于张拉整体结构的机器人腿部设计,通过调节缆绳张力来控制关节的旋转刚度,实现主动刚度控制。
- 实验结果表明,该设计能够有效降低冲击力,并在不同负载下实现相似的腿部弯曲,验证了其适应性和抗冲击能力。
📝 摘要(中文)
为了提升腿式机器人在复杂地形中的适应性和抗冲击能力,本研究提出了一种新型的机器人腿部机械设计,该设计基于张拉整体结构,结合了柔性缆绳和刚性元件,以平衡张力和压缩力。张拉整体结构天然具有被动柔顺性,非常适合吸收冲击和适应不同的地形。该设计包含具有张拉整体关节的机器人腿,以及通过调节缆绳驱动系统的张力来控制关节旋转刚度的机制。实验结果表明,该机器人腿能够将突然冲击的冲击力降低至少34.7%,并且通过调整其刚度配置,在10.26 N的负载差异下实现相似的腿部弯曲。这些结果表明,基于张拉整体结构的腿部设计具有实现更具弹性和适应性的腿式机器人的潜力。
🔬 方法详解
问题定义:现有腿式机器人在复杂地形的适应性和抗冲击能力不足,无法像动物一样精细地调节腿部刚度。这限制了机器人在崎岖地形上的运动能力和在突发冲击下的稳定性。因此,需要设计一种能够主动调节刚度的机器人腿部结构,以提高其适应性和鲁棒性。
核心思路:利用张拉整体结构的固有柔顺性和可调节性,设计一种新型的机器人腿部结构。通过调节张拉整体结构中缆绳的张力,可以改变关节的旋转刚度,从而实现对腿部刚度的精确控制。这种设计结合了被动柔顺性和主动刚度调节,能够在吸收冲击的同时,适应不同的地形。
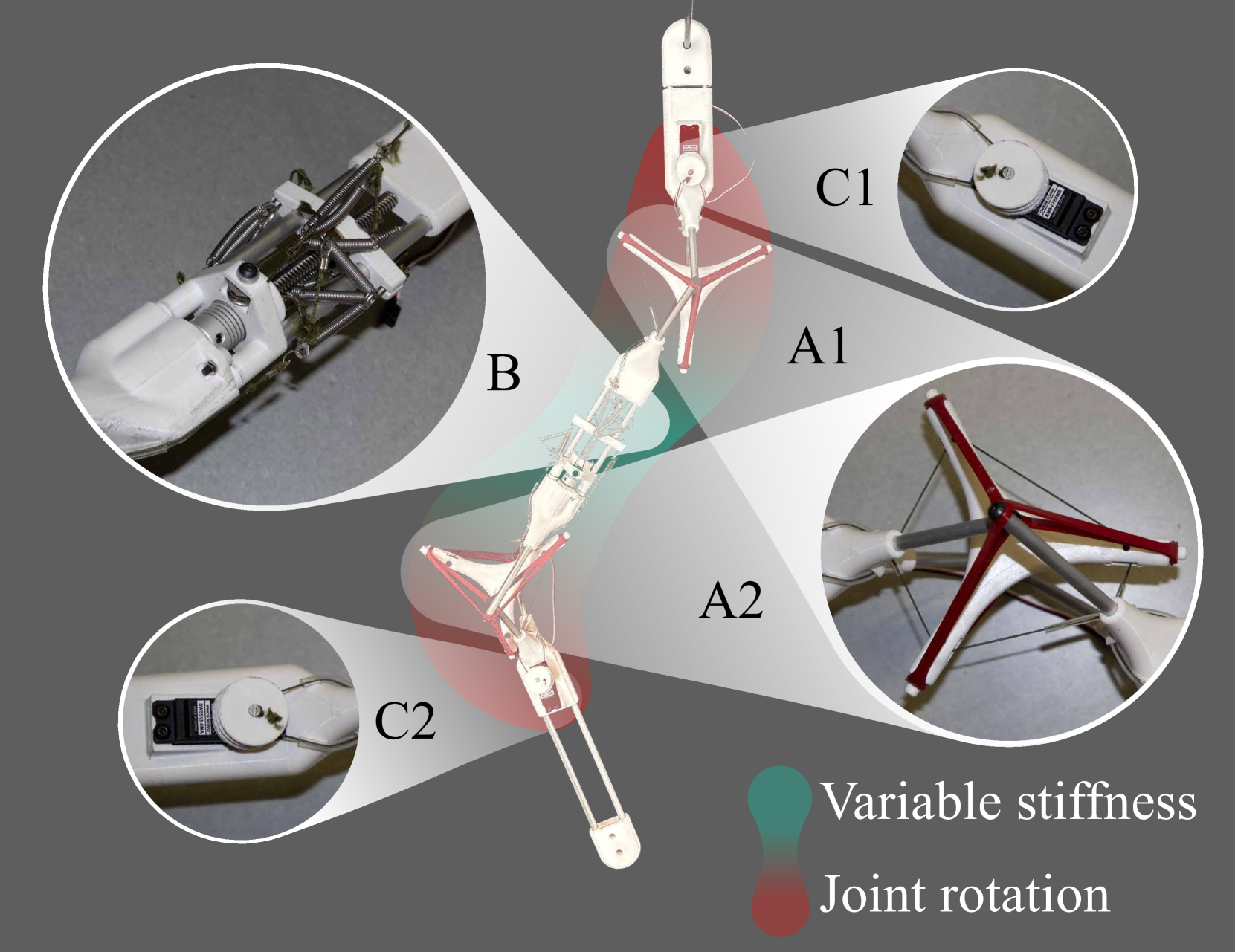
技术框架:该机器人腿部设计主要包含以下几个部分:刚性杆件、柔性缆绳、张紧机构和控制系统。刚性杆件构成腿部的基本骨架,柔性缆绳连接杆件,形成张拉整体结构。张紧机构用于调节缆绳的张力,从而改变关节的旋转刚度。控制系统根据环境反馈和运动需求,控制张紧机构,实现对腿部刚度的实时调节。
关键创新:该论文的关键创新在于将张拉整体结构应用于机器人腿部设计,并提出了一种通过调节缆绳张力来控制关节旋转刚度的机制。与传统的刚性腿部设计相比,该设计具有更好的柔顺性和适应性。与传统的被动柔顺腿部设计相比,该设计能够实现主动刚度调节,从而更好地适应不同的运动需求。
关键设计:缆绳的布置方式和张紧机构的设计是关键。缆绳需要合理布置,以保证结构的稳定性和可调节性。张紧机构需要能够精确地调节缆绳的张力,并具有足够的响应速度。控制系统需要能够根据环境反馈和运动需求,实时计算出最佳的缆绳张力,并控制张紧机构进行调节。具体的参数设置和控制算法未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该机器人腿能够将突然冲击的冲击力降低至少34.7%,这表明其具有良好的抗冲击性能。此外,通过调整其刚度配置,该腿能够在10.26 N的负载差异下实现相似的腿部弯曲,验证了其适应不同负载的能力。这些结果表明,基于张拉整体结构的腿部设计具有显著的优势。
🎯 应用场景
该研究成果可应用于各种腿式机器人,尤其是在崎岖地形或需要高冲击吸收的应用场景中,如搜救机器人、勘探机器人和外骨骼机器人。通过提高机器人的适应性和鲁棒性,可以使其在更复杂的环境中执行任务,并提高其安全性。
📄 摘要(原文)
Animals can finely modulate their leg stiffness to interact with complex terrains and absorb sudden shocks. In feats like leaping and sprinting, animals demonstrate a sophisticated interplay of opposing muscle pairs that actively modulate joint stiffness, while tendons and ligaments act as biological springs storing and releasing energy. Although legged robots have achieved notable progress in robust locomotion, they still lack the refined adaptability inherent in animal motor control. Integrating mechanisms that allow active control of leg stiffness presents a pathway towards more resilient robotic systems. This paper proposes a novel mechanical design to integrate compliancy into robot legs based on tensegrity - a structural principle that combines flexible cables and rigid elements to balance tension and compression. Tensegrity structures naturally allow for passive compliance, making them well-suited for absorbing impacts and adapting to diverse terrains. Our design features a robot leg with tensegrity joints and a mechanism to control the joint's rotational stiffness by modulating the tension of the cable actuation system. We demonstrate that the robot leg can reduce the impact forces of sudden shocks by at least 34.7 % and achieve a similar leg flexion under a load difference of 10.26 N by adjusting its stiffness configuration. The results indicate that tensegrity-based leg designs harbors potential towards more resilient and adaptable legged robots.