Robust Push Recovery on Bipedal Robots: Leveraging Multi-Domain Hybrid Systems with Reduced-Order Model Predictive Control
作者: Min Dai, Aaron D. Ames
分类: cs.RO
发布日期: 2025-04-25
备注: accepted at ACC2025
💡 一句话要点
提出基于降阶模型预测控制的多域混合系统,实现双足机器人鲁棒抗扰
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双足机器人 鲁棒控制 抗扰恢复 模型预测控制 混合系统 降阶模型 Cassie机器人
📋 核心要点
- 双足机器人抗扰恢复能力不足,尤其是在复杂地形和动态环境中,现有方法难以兼顾鲁棒性和实时性。
- 论文提出一种基于降阶模型预测控制的混合系统方法,通过优化足部位置、步进时间和踝关节控制来实现鲁棒抗扰。
- 在高保真仿真平台Cassie上验证了该框架,结果表明该方法在动态环境中具有良好的实时性和鲁棒性。
📝 摘要(中文)
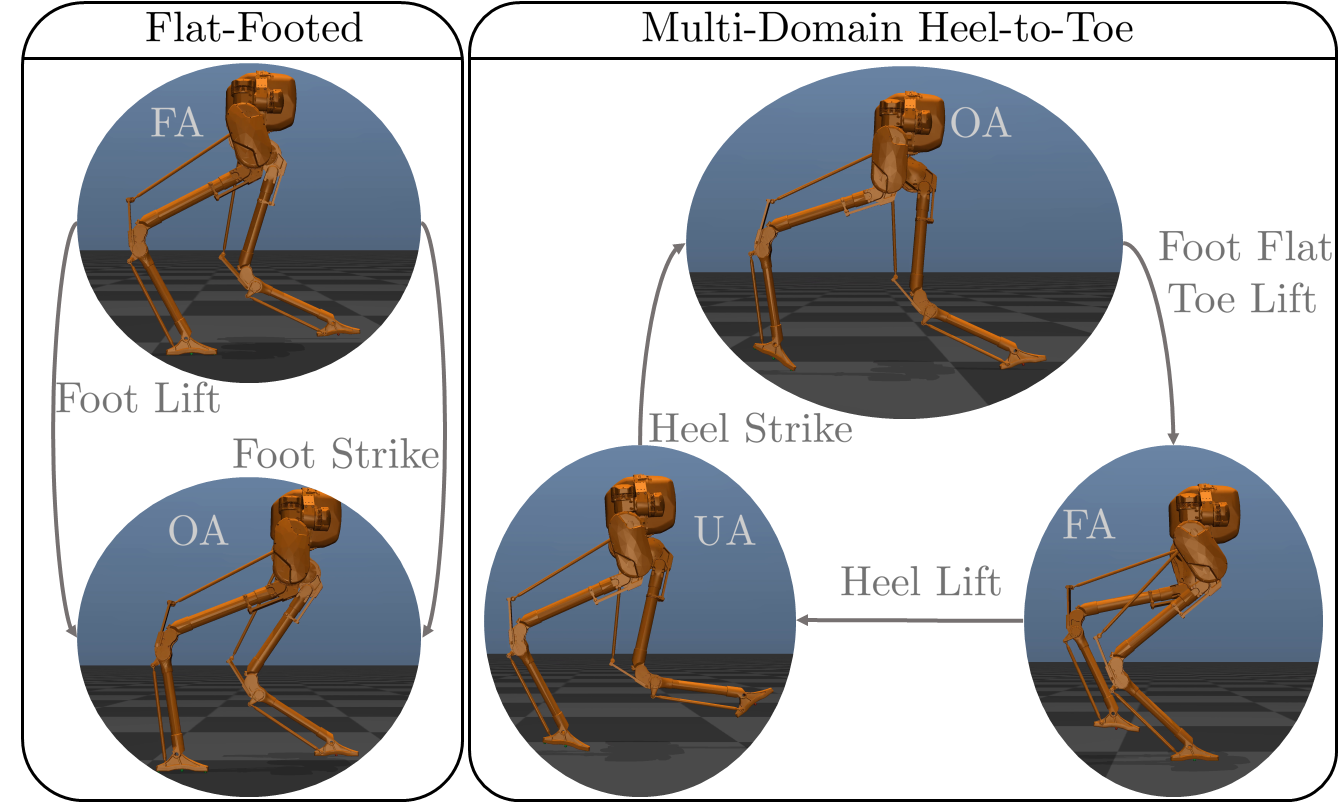
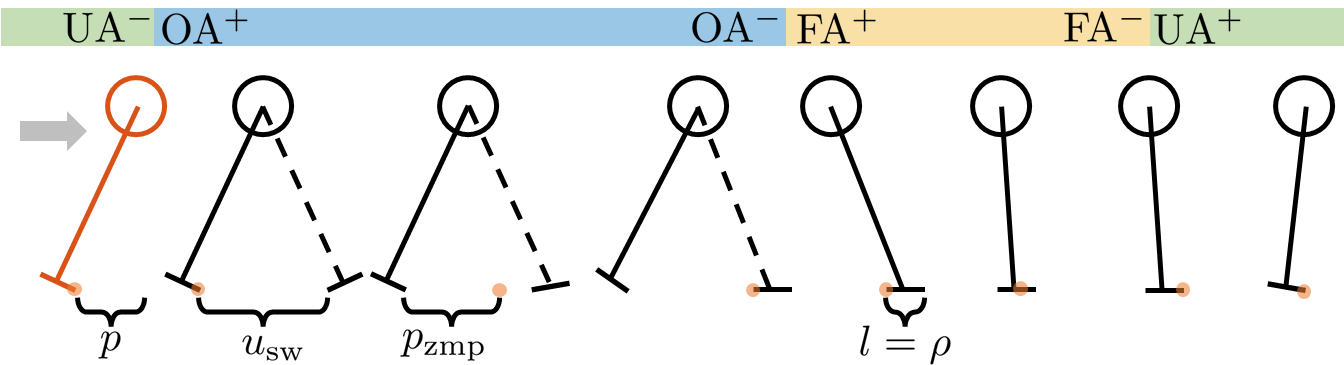
本文提出了一种新的控制框架,旨在实现双足机器人在运动过程中对外部扰动的鲁棒恢复。核心贡献是将步态混合系统模型与降阶模型预测控制器相结合,以确定足部位置、步进时间和踝关节控制。所提出的降阶模型是一个增强的线性倒立摆模型,具有零力矩点坐标;该模型被集成到模型预测控制框架中,用于在外部扰动下实现鲁棒稳定。通过显式地利用步态的混合动力学特性,我们的方法显著提高了在不同行走高度、速度、步进持续时间下的稳定性和鲁棒性,并且对平足和更复杂的多域脚跟到脚趾行走模式都有效。该框架在Cassie(一种3D欠驱动机器人)的高保真仿真中得到了验证,展示了实时可行性和显著提高的稳定性。结果表明了该方法在动态环境中的鲁棒性。
🔬 方法详解
问题定义:现有双足机器人步态控制方法在面对外部扰动时,尤其是在复杂地形和动态环境中,往往难以保持平衡和鲁棒性。传统的控制方法可能无法充分利用步态的混合动力学特性,导致抗扰能力不足,或者计算复杂度过高,难以满足实时性要求。因此,需要一种能够充分利用机器人动力学特性,同时保证计算效率的控制框架,以实现鲁棒的抗扰恢复。
核心思路:论文的核心思路是将双足机器人的步态建模为混合系统,并利用降阶模型预测控制(MPC)来优化机器人的运动轨迹,从而实现鲁棒的抗扰恢复。通过显式地考虑步态的离散切换特性,可以更好地利用机器人的动力学特性,提高控制器的性能。同时,采用降阶模型可以降低计算复杂度,保证控制器的实时性。
技术框架:该控制框架主要包含以下几个模块:1) 混合系统建模:将双足机器人的步态建模为混合系统,包括连续动力学和离散切换规则。2) 降阶模型构建:构建一个增强的线性倒立摆模型,用于预测机器人的运动状态。3) 模型预测控制:利用降阶模型预测机器人的未来运动轨迹,并通过优化足部位置、步进时间和踝关节控制来实现鲁棒的抗扰恢复。4) 仿真验证:在高保真仿真平台Cassie上验证该控制框架的性能。
关键创新:该论文的关键创新在于将混合系统建模和降阶模型预测控制相结合,从而实现了双足机器人的鲁棒抗扰恢复。与传统的控制方法相比,该方法能够更好地利用机器人的动力学特性,提高控制器的性能。同时,采用降阶模型可以降低计算复杂度,保证控制器的实时性。此外,该方法还能够适用于不同的行走模式,包括平足和脚跟到脚趾行走。
关键设计:论文中关键的设计包括:1) 降阶模型的构建:选择合适的降阶模型,例如增强的线性倒立摆模型,以保证预测精度和计算效率。2) 模型预测控制器的设计:选择合适的优化目标和约束条件,例如零力矩点约束和关节力矩约束,以保证机器人的稳定性和安全性。3) 混合系统建模:准确描述步态的离散切换规则,例如足部触地和离地事件,以保证模型的准确性。
🖼️ 关键图片

📊 实验亮点
该方法在Cassie机器人上的高保真仿真结果表明,所提出的控制框架能够显著提高机器人的抗扰能力。实验结果表明,该方法能够在各种行走高度、速度和步进持续时间下保持机器人的稳定,并且对平足和脚跟到脚趾行走模式都有效。与传统的控制方法相比,该方法能够更好地应对外部扰动,并实现更鲁棒的抗扰恢复。
🎯 应用场景
该研究成果可应用于各种双足机器人,尤其是在复杂地形和动态环境中作业的机器人,例如搜救机器人、巡检机器人和物流机器人。通过提高机器人的抗扰能力,可以使其在更加恶劣的环境中稳定工作,从而扩展其应用范围和实际价值。未来,该技术还可以应用于外骨骼机器人和假肢,帮助行动不便的人群恢复行走能力。
📄 摘要(原文)
In this paper, we present a novel control framework to achieve robust push recovery on bipedal robots while locomoting. The key contribution is the unification of hybrid system models of locomotion with a reduced-order model predictive controller determining: foot placement, step timing, and ankle control. The proposed reduced-order model is an augmented Linear Inverted Pendulum model with zero moment point coordinates; this is integrated within a model predictive control framework for robust stabilization under external disturbances. By explicitly leveraging the hybrid dynamics of locomotion, our approach significantly improves stability and robustness across varying walking heights, speeds, step durations, and is effective for both flat-footed and more complex multi-domain heel-to-toe walking patterns. The framework is validated with high-fidelity simulation on Cassie, a 3D underactuated robot, showcasing real-time feasibility and substantially improved stability. The results demonstrate the robustness of the proposed method in dynamic environments.