Depth-Constrained ASV Navigation with Deep RL and Limited Sensing
作者: Amirhossein Zhalehmehrabi, Daniele Meli, Francesco Dal Santo, Francesco Trotti, Alessandro Farinelli
分类: cs.RO, cs.AI
发布日期: 2025-04-25 (更新: 2025-10-25)
备注: 8 pages, 8 figures, Accepted to IEEE Robotics and Automation Letters (this is not the final version)
💡 一句话要点
提出深度约束下的ASV导航强化学习框架,解决浅水环境有限感知问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 自主水面艇 强化学习 高斯过程回归 深度约束导航 浅水环境 单波束声纳 sim-to-real迁移
📋 核心要点
- 浅水环境下的自主水面艇导航面临深度约束和动态扰动,传统方法在有限感知下难以保证安全高效。
- 论文提出结合高斯过程回归的强化学习框架,利用单波束声纳数据逐步构建水深图,增强环境感知。
- 实验验证了该方法在模拟和真实环境中的有效性,实现了sim-to-real迁移,提升了导航性能。
📝 摘要(中文)
本文提出了一种用于深度约束下自主水面艇(ASV)导航的强化学习(RL)框架。在浅水环境中,ASV面临动态扰动和深度限制的挑战。传统导航策略在传感器信息有限的情况下难以保证安全和高效运行。该框架仅使用来自下视单波束回声测深仪(SBES)的单次深度测量,引导ASV到达目标并避开不安全区域。为了增强环境感知能力,我们将高斯过程(GP)回归集成到RL框架中,使智能体能够从稀疏的声纳读数中逐步估计水深图,从而提供更丰富的环境表示,改善决策。此外,我们展示了有效的sim-to-real迁移,确保训练后的策略能够很好地泛化到真实水域条件。实验结果验证了该方法在具有挑战性的浅水环境中提高ASV导航性能并保持安全性的能力。
🔬 方法详解
问题定义:论文旨在解决浅水环境下自主水面艇(ASV)在深度约束下的导航问题。现有方法在传感器信息有限(特别是仅有单波束回声测深仪SBES提供的稀疏深度信息)的情况下,难以准确感知环境,从而导致导航效率低下甚至安全风险。传统导航方法难以适应动态扰动和复杂水下地形,需要更智能的决策策略。
核心思路:论文的核心思路是将强化学习(RL)与高斯过程(GP)回归相结合。RL负责学习导航策略,而GP回归则利用有限的深度测量数据构建水深图,从而增强RL智能体的环境感知能力。这种结合使得智能体能够在稀疏信息下做出更明智的导航决策,避免碰撞并高效到达目标。
技术框架:整体框架包含以下几个主要模块:1) 环境模拟器:模拟ASV在浅水环境中的运动和传感器数据;2) RL智能体:使用深度强化学习算法(具体算法未知)学习导航策略;3) 高斯过程回归模块:利用SBES提供的深度数据,通过GP回归估计水深图;4) 奖励函数:设计奖励函数引导智能体学习安全高效的导航策略。RL智能体根据当前状态(包括自身位置、目标位置和估计的水深图)选择动作,环境模拟器执行动作并返回新的状态和奖励,GP回归模块更新水深图。
关键创新:该论文的关键创新在于将高斯过程回归集成到强化学习框架中,用于增强ASV在浅水环境中的环境感知能力。与传统的仅依赖于RL的导航方法相比,该方法能够利用有限的传感器数据构建环境模型,从而提高导航的鲁棒性和效率。此外,论文还展示了有效的sim-to-real迁移,使得训练后的策略能够在真实水域中应用。
关键设计:论文中关于高斯过程回归的具体参数设置(如核函数选择、超参数优化等)以及强化学习算法的具体细节(如网络结构、损失函数、奖励函数设计等)未知。奖励函数的设计是关键,需要平衡导航效率、安全性以及对深度约束的满足程度。sim-to-real迁移策略也至关重要,需要考虑真实环境与模拟环境之间的差异,例如水流、传感器噪声等。
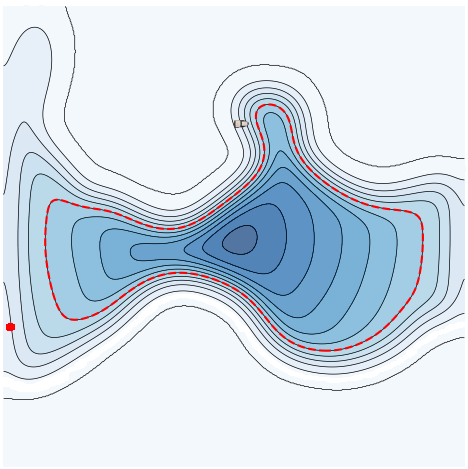
🖼️ 关键图片


📊 实验亮点
论文验证了所提出的方法在模拟和真实环境中的有效性。通过与传统RL方法对比,该方法在导航效率和安全性方面均有显著提升。具体性能数据未知,但论文强调了sim-to-real迁移的成功,表明该方法具有良好的泛化能力,能够在真实水域条件下稳定运行。
🎯 应用场景
该研究成果可应用于多种水上场景,例如水下地形勘测、水质监测、港口巡逻、搜救行动等。通过提升自主水面艇在浅水环境中的导航能力,可以降低人工成本,提高作业效率,并减少人员面临的风险。未来,该技术有望与其他传感器(如摄像头、激光雷达)融合,进一步提升环境感知能力和导航精度。
📄 摘要(原文)
Autonomous Surface Vehicles (ASVs) play a crucial role in maritime operations, yet their navigation in shallow-water environments remains challenging due to dynamic disturbances and depth constraints. Traditional navigation strategies struggle with limited sensor information, making safe and efficient operation difficult. In this paper, we propose a reinforcement learning (RL) framework for ASV navigation under depth constraints, where the vehicle must reach a target while avoiding unsafe areas with only a single depth measurement per timestep from a downward-facing Single Beam Echosounder (SBES). To enhance environmental awareness, we integrate Gaussian Process (GP) regression into the RL framework, enabling the agent to progressively estimate a bathymetric depth map from sparse sonar readings. This approach improves decision-making by providing a richer representation of the environment. Furthermore, we demonstrate effective sim-to-real transfer, ensuring that trained policies generalize well to real-world aquatic conditions. Experimental results validate our method's capability to improve ASV navigation performance while maintaining safety in challenging shallow-water environments.