Soft yet Effective Robots via Holistic Co-Design
作者: Maximilian Stölzle, Niccolò Pagliarani, Francesco Stella, Josie Hughes, Cecilia Laschi, Daniela Rus, Matteo Cianchetti, Cosimo Della Santina, Gioele Zardini
分类: cs.RO
发布日期: 2025-04-20
备注: 28 pages, 4 figures, under review
💡 一句话要点
提出软体机器人整体协同设计框架,提升性能、耐用性和可制造性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 协同设计 多目标优化 仿真验证 模型预测控制
📋 核心要点
- 软体机器人设计面临性能、耐用性和可制造性难以兼顾的挑战,传统串行设计流程缺乏有效反馈。
- 论文提出一种整体协同设计框架,同时优化机器人本体和控制策略,并考虑多种设计价值。
- 该框架通过真实原型验证、替代指标和模型预测控制,提升了设计效率和实际性能。
📝 摘要(中文)
软体机器人因其材料的柔顺性,在与人类或脆弱环境的无缝交互方面具有内在安全性。然而,其开发具有挑战性,因为它需要将材料、几何形状、驱动和自主性集成到复杂的机电系统中。尽管取得了进展,但该领域难以在特定任务的性能与更广泛的因素(如耐用性和可制造性)之间取得平衡。我们发现,传统的顺序设计流程缺乏反馈循环,加剧了这一困难。本文回顾了新兴的协同设计方法,这些方法同时优化了机器人本体和控制策略,从而能够发现高度定制于给定任务的非常规设计。我们确定了限制此类协同设计方法在软体机器人领域更广泛应用的三个关键缺点。首先,许多方法依赖于基于仿真的评估,侧重于单一指标,而实际设计必须满足各种标准。其次,当前的方法强调计算建模,而没有确保可行的实现,从而导致仿真到现实的性能差距。第三,高计算需求限制了对完整设计空间的探索。最后,我们提出了一个整体协同设计框架,通过整合更广泛的设计价值、集成真实世界的原型来改进评估,并通过替代指标和基于模型的控制策略来提高效率,从而应对这些挑战。这种整体框架通过同时优化功能、耐用性和可制造性,有可能提高软体机器人的可靠性并促进其更广泛的接受,从而改变人机交互。
🔬 方法详解
问题定义:软体机器人设计需要在性能、耐用性和可制造性之间进行权衡。现有方法通常采用串行设计流程,缺乏有效的反馈循环,导致设计结果难以满足实际需求。此外,许多方法依赖于单一指标的仿真评估,忽略了真实世界的复杂性,容易产生仿真到现实的性能差距。高昂的计算成本也限制了对完整设计空间的探索。
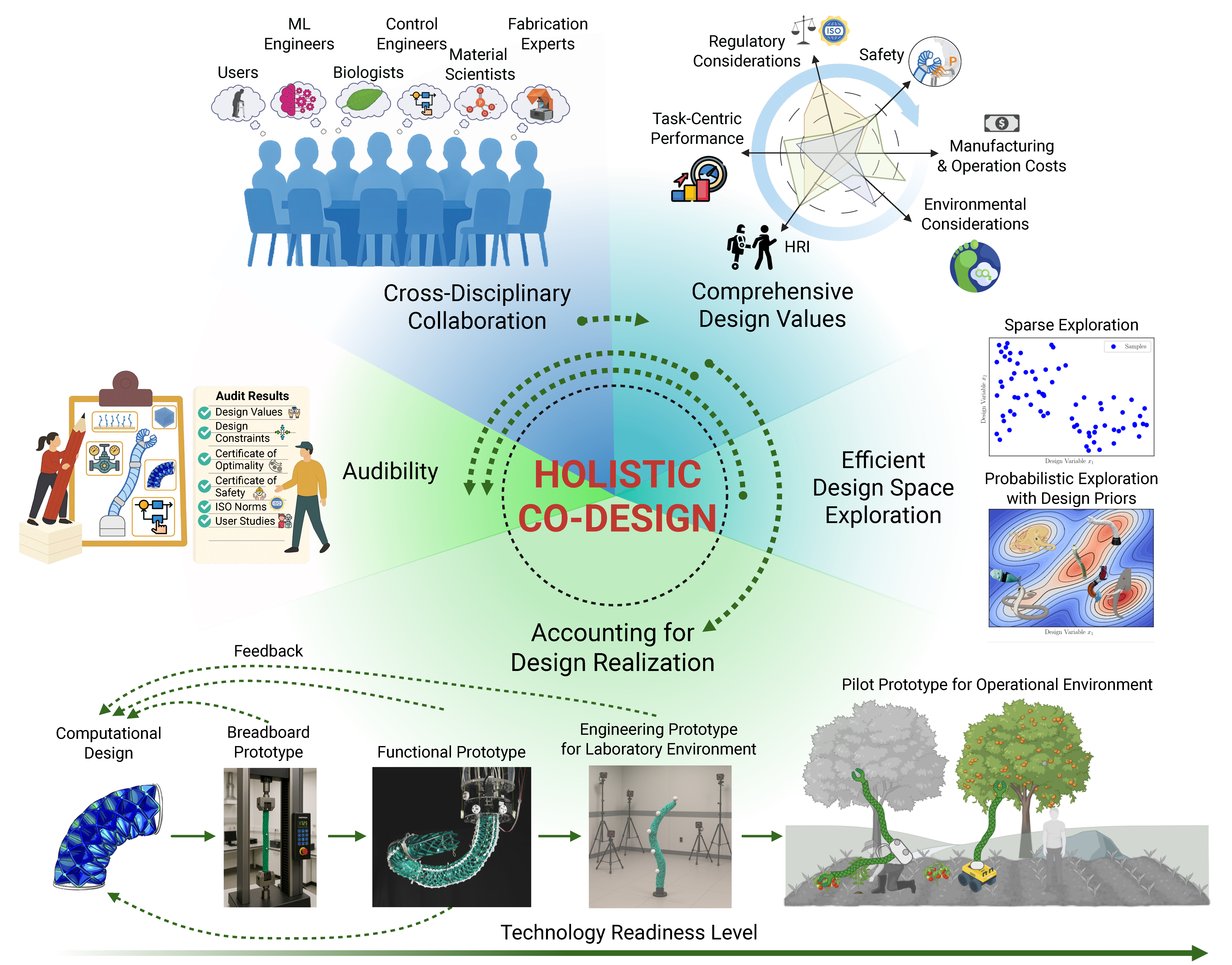
核心思路:论文的核心思路是采用整体协同设计方法,同时优化软体机器人的本体(材料、几何形状)和控制策略(大脑)。通过将功能、耐用性和可制造性等多种设计价值纳入优化过程,并结合真实世界的原型验证,可以克服传统方法的局限性,发现更优的软体机器人设计。
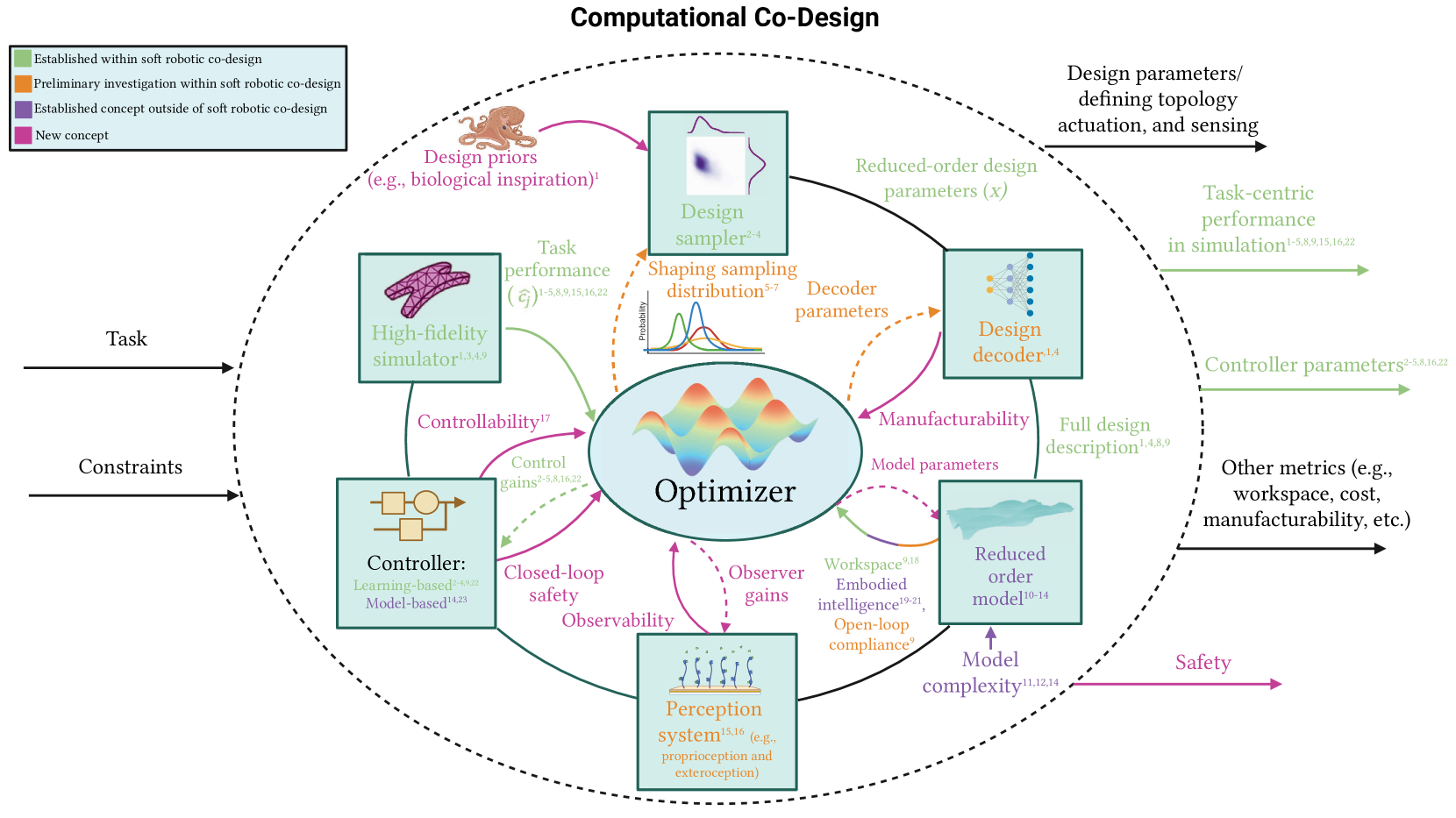
技术框架:该整体协同设计框架包含以下主要模块:1) 设计空间定义:明确软体机器人的材料、几何形状和控制策略的参数范围。2) 多目标优化:同时优化功能、耐用性和可制造性等多个目标。3) 仿真评估:使用物理引擎对软体机器人进行仿真,评估其性能。4) 真实原型验证:构建软体机器人的真实原型,并在真实环境中进行测试,验证仿真结果。5) 替代指标学习:利用仿真数据学习替代指标,加速优化过程。6) 基于模型的控制:设计基于模型的控制策略,提高软体机器人的控制精度和鲁棒性。
关键创新:该方法最重要的技术创新点在于其整体协同设计理念,即同时优化机器人本体和控制策略,并考虑多种设计价值。与传统方法相比,该方法能够发现更优的软体机器人设计,并有效解决仿真到现实的性能差距。此外,该方法还采用了替代指标学习和基于模型的控制等技术,提高了设计效率和控制精度。
关键设计:关键设计包括:1) 多目标优化算法的选择,例如 Pareto 最优解集搜索算法。2) 替代指标的选取和学习方法,例如高斯过程回归或神经网络。3) 基于模型的控制器的设计,例如模型预测控制(MPC)。4) 真实原型验证的实验方案设计,包括测试环境、测试指标和数据采集方法。
🖼️ 关键图片

📊 实验亮点
论文提出的整体协同设计框架能够显著提升软体机器人的性能、耐用性和可制造性。虽然摘要中没有给出具体的实验数据,但强调了通过真实原型验证和替代指标学习,能够有效解决仿真到现实的性能差距,并提高设计效率。该框架为软体机器人的设计提供了一种新的思路。
🎯 应用场景
该研究成果可应用于医疗康复、灾害救援、工业检测等领域。例如,可用于开发能够安全地与人体交互的医疗机器人,或在复杂环境中进行搜索和救援的机器人。通过优化软体机器人的耐用性和可制造性,可以降低其生产成本,促进其更广泛的应用。
📄 摘要(原文)
Soft robots promise inherent safety via their material compliance for seamless interactions with humans or delicate environments. Yet, their development is challenging because it requires integrating materials, geometry, actuation, and autonomy into complex mechatronic systems. Despite progress, the field struggles to balance task-specific performance with broader factors like durability and manufacturability - a difficulty that we find is compounded by traditional sequential design processes with their lack of feedback loops. In this perspective, we review emerging co-design approaches that simultaneously optimize the body and brain, enabling the discovery of unconventional designs highly tailored to the given tasks. We then identify three key shortcomings that limit the broader adoption of such co-design methods within the soft robotics domain. First, many rely on simulation-based evaluations focusing on a single metric, while real-world designs must satisfy diverse criteria. Second, current methods emphasize computational modeling without ensuring feasible realization, risking sim-to-real performance gaps. Third, high computational demands limit the exploration of the complete design space. Finally, we propose a holistic co-design framework that addresses these challenges by incorporating a broader range of design values, integrating real-world prototyping to refine evaluations, and boosting efficiency through surrogate metrics and model-based control strategies. This holistic framework, by simultaneously optimizing functionality, durability, and manufacturability, has the potential to enhance reliability and foster broader acceptance of soft robotics, transforming human-robot interactions.